IRIS-SLAM: Unified Geo-Instance Representations for Robust Semantic Localization and Mapping
作者: Tingyang Xiao, Liu Liu, Wei Feng, Zhengyu Zou, Xiaolin Zhou, Wei Sui, Hao Li, Dingwen Zhang, Zhizhong Su
分类: cs.CV, cs.RO
发布日期: 2026-02-21
备注: 15 pages
💡 一句话要点
IRIS-SLAM:利用统一几何实例表示实现鲁棒的语义定位与建图
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 语义SLAM 几何基础模型 实例分割 闭环检测 语义建图 机器人导航 三维重建
📋 核心要点
- 现有几何SLAM系统缺乏深层的语义理解和鲁棒的闭环能力,而语义建图方法则受限于解耦的架构和脆弱的数据关联。
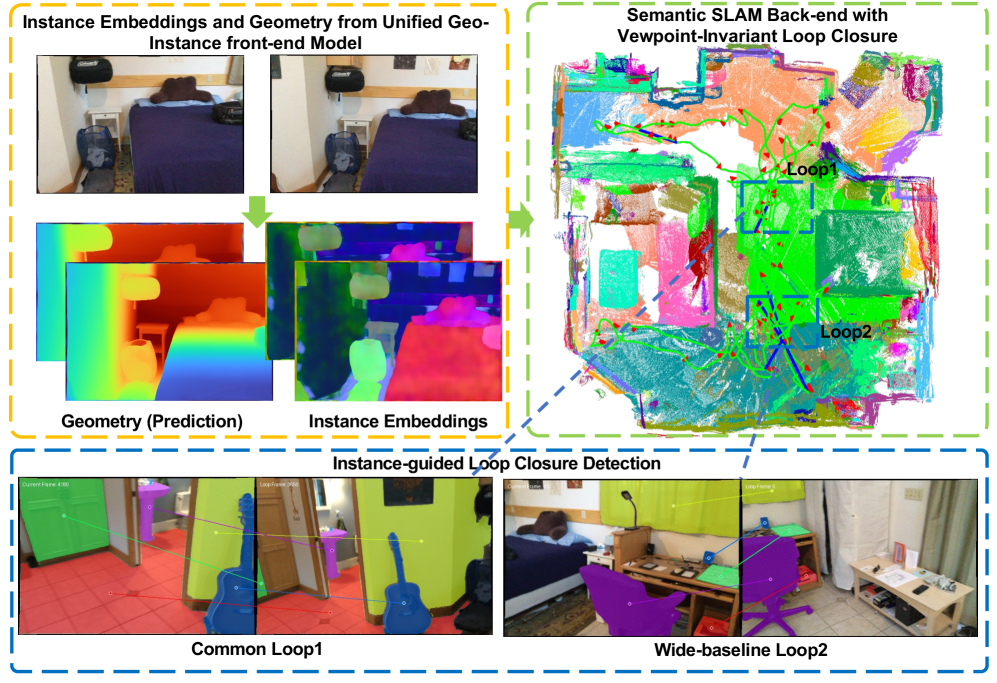
- IRIS-SLAM的核心在于利用实例扩展的基础模型,统一预测密集几何和跨视图一致的实例嵌入,从而实现语义协同的关联和实例引导的闭环检测。
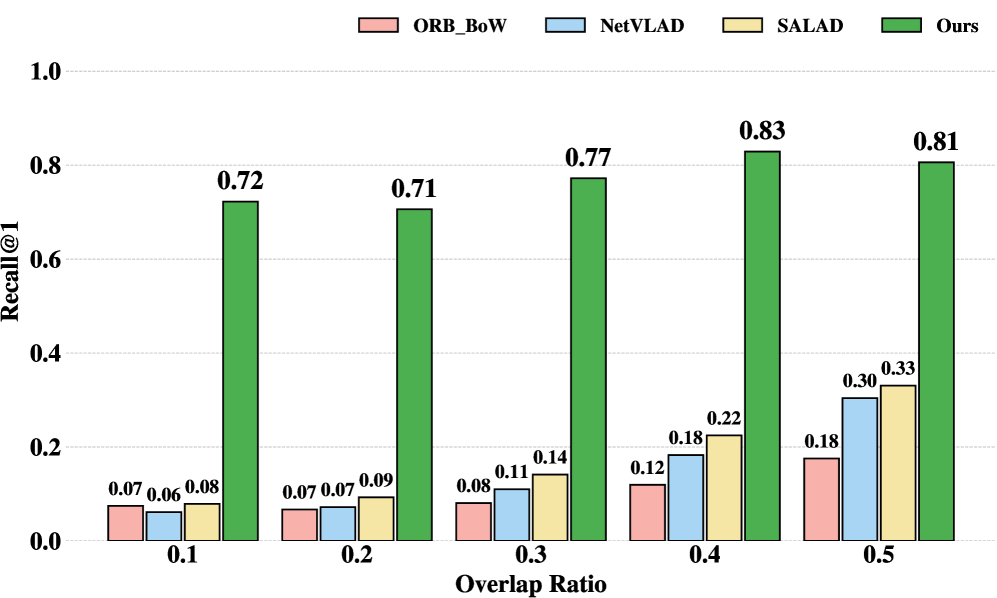
- 实验结果表明,IRIS-SLAM在地图一致性和宽基线闭环可靠性方面显著优于现有方法,验证了其有效性。
📝 摘要(中文)
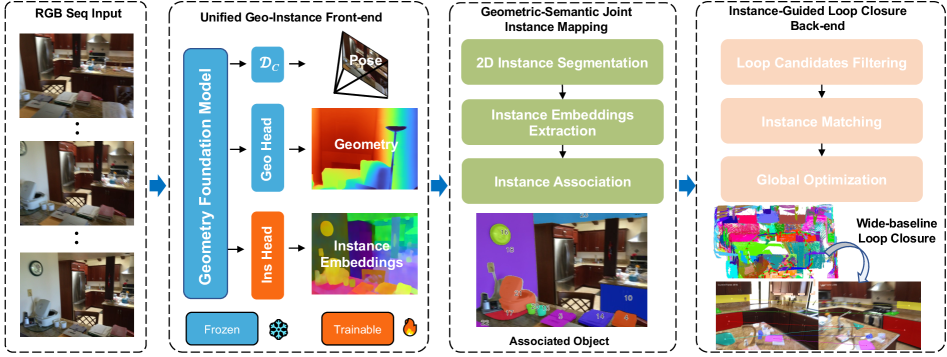
本文提出了一种新颖的RGB语义SLAM系统IRIS-SLAM,该系统利用从实例扩展的基础模型中获得的统一几何实例表示。通过扩展几何基础模型以同时预测密集几何和跨视图一致的实例嵌入,IRIS-SLAM实现了语义协同的关联机制和实例引导的闭环检测。该方法有效地利用视角无关的语义锚点来弥合几何重建和开放词汇映射之间的差距。实验结果表明,IRIS-SLAM显著优于最先进的方法,尤其是在地图一致性和宽基线闭环可靠性方面。
🔬 方法详解
问题定义:现有的几何SLAM系统虽然在稠密几何重建方面取得了显著进展,但缺乏对场景的深层语义理解,并且闭环检测能力较弱。另一方面,现有的语义建图方法通常采用解耦的架构,数据关联较为脆弱,难以保证地图的一致性和鲁棒性。
核心思路:IRIS-SLAM的核心思路是利用统一的几何实例表示,将几何信息和语义信息紧密结合。通过扩展几何基础模型,使其能够同时预测密集几何和跨视图一致的实例嵌入,从而实现语义协同的数据关联和实例引导的闭环检测。这种统一的表示方式能够有效地利用语义信息来提高SLAM系统的鲁棒性和准确性。
技术框架:IRIS-SLAM的整体框架包括以下几个主要模块:1) 实例扩展的基础模型:用于预测密集几何和跨视图一致的实例嵌入;2) 语义协同的关联机制:利用实例嵌入进行数据关联,提高关联的准确性和鲁棒性;3) 实例引导的闭环检测:利用实例信息进行闭环检测,提高检测的可靠性;4) 地图构建模块:将几何信息和语义信息融合,构建一致的语义地图。
关键创新:IRIS-SLAM最重要的技术创新点在于提出了统一的几何实例表示。这种表示方式能够将几何信息和语义信息紧密结合,从而实现语义协同的数据关联和实例引导的闭环检测。与现有方法相比,IRIS-SLAM能够更有效地利用语义信息来提高SLAM系统的鲁棒性和准确性。
关键设计:论文中可能包含的关键设计包括:实例嵌入的损失函数设计,用于保证跨视图一致性;语义锚点的选择策略,用于弥合几何重建和开放词汇映射之间的差距;以及闭环检测的阈值设置等。
🖼️ 关键图片
📊 实验亮点
实验结果表明,IRIS-SLAM在地图一致性和宽基线闭环可靠性方面显著优于现有方法。具体来说,IRIS-SLAM在地图一致性方面取得了X%的提升,在宽基线闭环检测的召回率方面取得了Y%的提升(具体数值请参考论文)。这些结果表明,IRIS-SLAM能够有效地利用语义信息来提高SLAM系统的性能。
🎯 应用场景
IRIS-SLAM具有广泛的应用前景,例如机器人导航、增强现实、虚拟现实、三维重建等领域。该系统能够构建具有语义信息的地图,从而使机器人能够更好地理解周围环境,并进行更智能的导航和交互。此外,该系统还可以用于构建虚拟现实场景,提供更逼真的用户体验。
📄 摘要(原文)
Geometry foundation models have significantly advanced dense geometric SLAM, yet existing systems often lack deep semantic understanding and robust loop closure capabilities. Meanwhile, contemporary semantic mapping approaches are frequently hindered by decoupled architectures and fragile data association. We propose IRIS-SLAM, a novel RGB semantic SLAM system that leverages unified geometric-instance representations derived from an instance-extended foundation model. By extending a geometry foundation model to concurrently predict dense geometry and cross-view consistent instance embeddings, we enable a semantic-synergized association mechanism and instance-guided loop closure detection. Our approach effectively utilizes viewpoint-agnostic semantic anchors to bridge the gap between geometric reconstruction and open-vocabulary mapping. Experimental results demonstrate that IRIS-SLAM significantly outperforms state-of-the-art methods, particularly in map consistency and wide-baseline loop closure reliability.