Neural Implicit Representations for 3D Synthetic Aperture Radar Imaging
作者: Nithin Sugavanam, Emre Ertin
分类: eess.SP, cs.CV
发布日期: 2026-02-19
💡 一句话要点
提出基于神经隐式表示的3D合成孔径雷达成像方法,解决稀疏采样下的重建伪影问题。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 3D合成孔径雷达 神经隐式表示 符号距离函数 逆问题 表面重建
📋 核心要点
- 传统3D SAR成像在稀疏采样下重建质量差,存在显著伪影,依赖简单先验难以有效正则化。
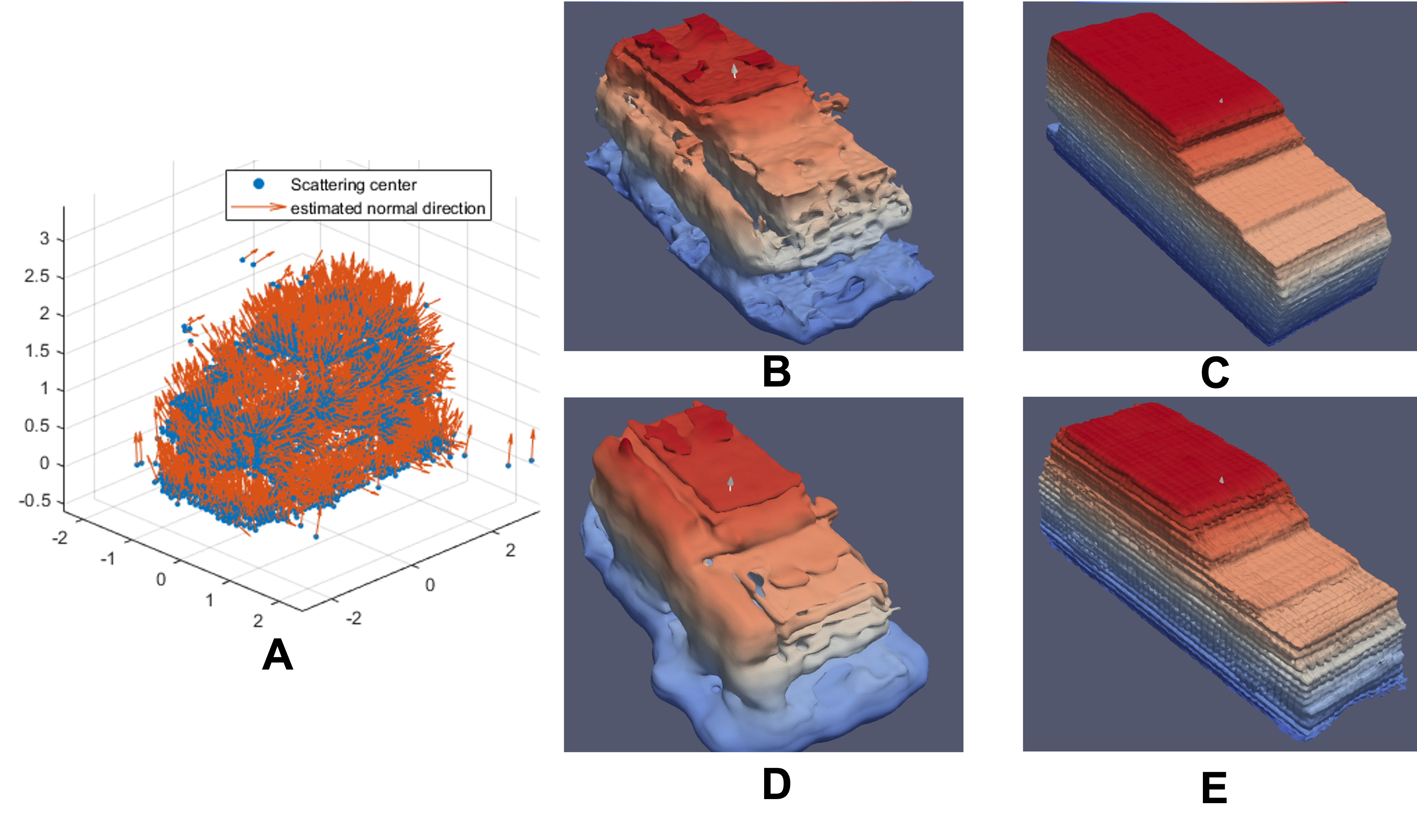
- 利用神经隐式表示建模物体表面,以符号距离函数编码,从稀疏散射数据中学习表面信息。
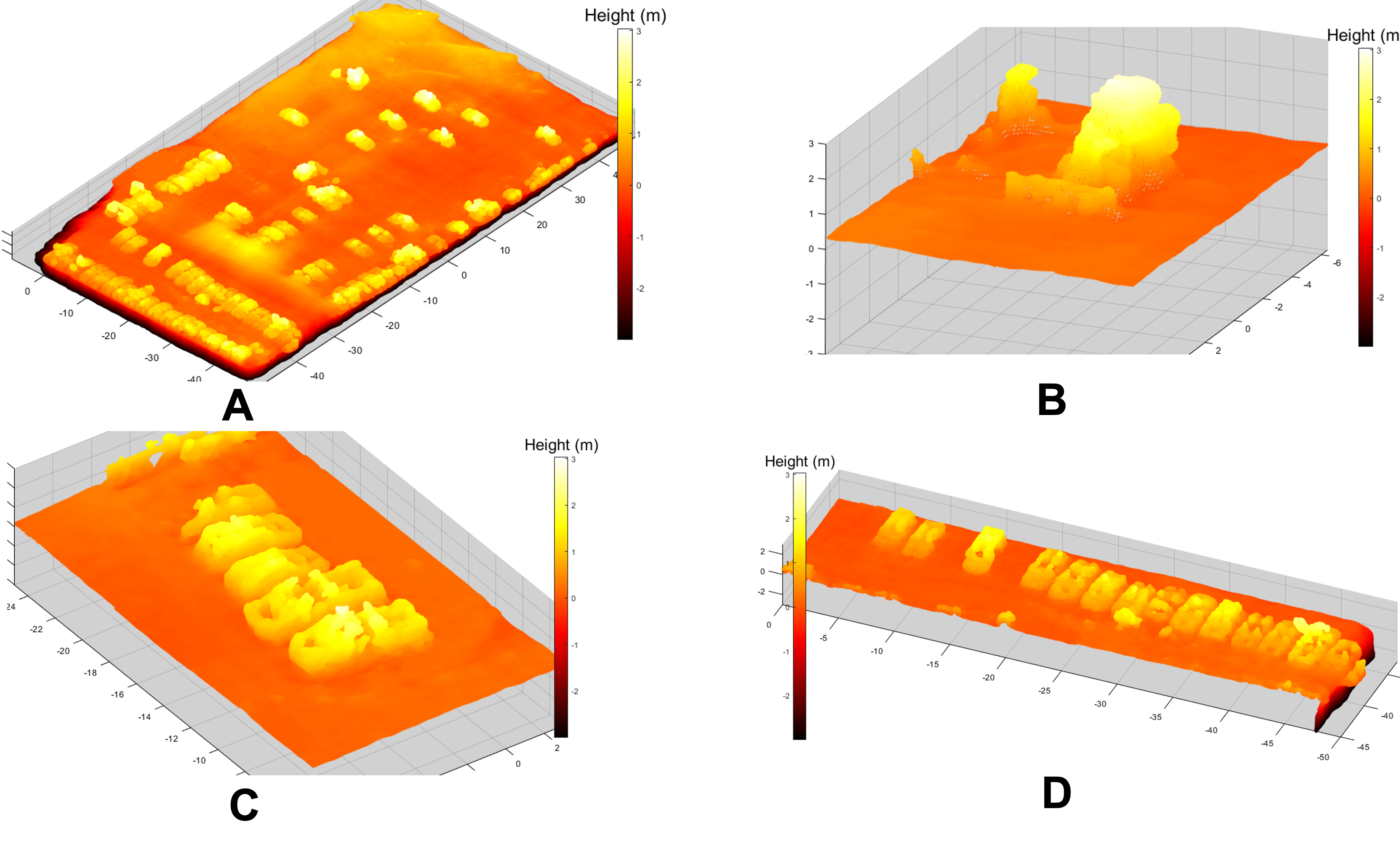
- 通过从隐式表面表示中采样点正则化表面估计,实验证明了模型在真实和模拟数据上的有效性。
📝 摘要(中文)
本文提出了一种基于神经隐式表示的3D合成孔径雷达(SAR)成像方法。SAR是一种层析传感器,它测量场景3D空间傅里叶变换的2D切片。在许多实际场景中,测量的2D切片集合无法完全填充傅里叶域的3D空间,导致重建图像中出现显著伪影。传统方法通常使用图像域中的稀疏性等简单先验来正则化逆问题。本文回顾了我们最近的工作,该工作利用神经结构对SAR回波中占主导地位的表面散射进行建模,从而在3D SAR成像中取得了最先进的结果。这些神经结构以符号距离函数的形式编码物体表面,该函数从稀疏散射数据中学习得到。由于从稀疏且噪声大的点云中估计平滑表面是一个不适定问题,因此我们通过在训练步骤中从隐式表面表示中采样点来正则化表面估计。我们使用来自单个车辆和包含大量车辆的较大场景的测量和模拟数据,证明了该模型表示目标散射的能力。最后,我们提出了未来的研究方向,呼吁开发能够学习复值神经表示的方法,从而能够从体神经隐式表示中合成新的集合。
🔬 方法详解
问题定义:传统3D SAR成像面临的主要问题是在实际应用中,由于传感器轨迹或观测条件的限制,获取的SAR数据通常是傅里叶域中的稀疏采样。这种不完备的采样会导致重建图像中出现严重的伪影,降低图像质量和可解释性。现有的方法,例如基于图像域稀疏性的正则化方法,虽然可以缓解部分问题,但其先验假设过于简单,难以有效处理复杂场景下的重建问题。
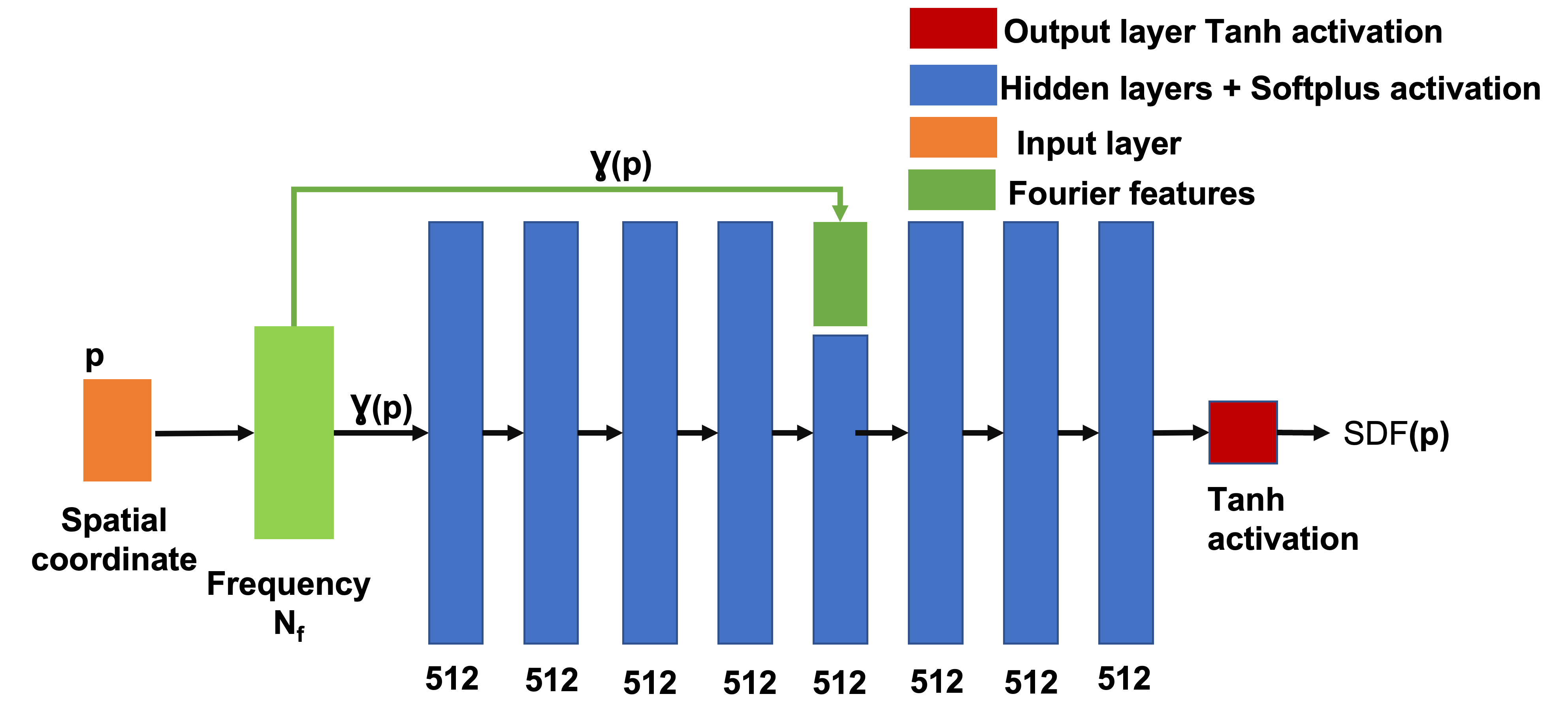
核心思路:本文的核心思路是利用神经隐式表示(Neural Implicit Representations)来建模场景中的物体表面。具体来说,将物体表面表示为一个符号距离函数(Signed Distance Function, SDF),该函数可以通过神经网络学习得到。通过将SAR数据作为神经网络的输入,并训练网络预测场景中物体的SDF值,可以实现从稀疏SAR数据到物体表面的重建。这种方法的核心优势在于,神经隐式表示具有强大的函数逼近能力,可以有效地表示复杂的物体表面,并且可以通过正则化技术来提高重建的鲁棒性。
技术框架:该方法主要包含以下几个阶段:1) 数据预处理:对原始SAR数据进行预处理,包括校正、配准等操作,得到可用于训练神经网络的数据。2) 网络结构设计:设计一个神经网络,其输入为空间坐标,输出为该坐标对应的SDF值。常用的网络结构包括MLP(多层感知机)等。3) 损失函数设计:设计一个损失函数,用于衡量网络预测的SDF值与真实SDF值之间的差异。常用的损失函数包括均方误差(MSE)等。4) 网络训练:使用预处理后的SAR数据训练神经网络,使其能够准确预测场景中物体的SDF值。5) 表面重建:利用训练好的神经网络,通过Marching Cubes等算法从SDF值中提取物体表面。
关键创新:该方法最重要的技术创新点在于将神经隐式表示引入到3D SAR成像中。与传统的基于图像域稀疏性的正则化方法相比,神经隐式表示可以更有效地建模复杂的物体表面,并且可以通过正则化技术来提高重建的鲁棒性。此外,该方法还可以通过学习复值神经表示来合成新的集合,从而扩展了SAR成像的应用范围。
关键设计:在网络结构方面,可以使用多层感知机(MLP)作为基本的网络结构,并根据实际问题的复杂度调整网络的层数和每层的神经元数量。在损失函数方面,除了常用的均方误差(MSE)之外,还可以引入Eikonal loss等正则化项,以保证SDF函数的梯度接近于1。在训练过程中,可以使用Adam等优化算法来优化网络参数,并设置合适的学习率和batch size。
🖼️ 关键图片
📊 实验亮点
论文通过实验验证了该方法在单车辆和多车辆场景下的有效性。实验结果表明,与传统的基于稀疏性的方法相比,该方法可以显著减少重建图像中的伪影,提高图像质量。具体来说,在模拟数据和真实数据上都取得了state-of-the-art的结果,证明了神经隐式表示在3D SAR成像中的优越性。
🎯 应用场景
该研究成果可应用于自动驾驶、遥感测绘、目标识别等领域。在自动驾驶中,可以利用SAR数据重建周围环境的三维模型,提高车辆的感知能力。在遥感测绘中,可以利用SAR数据生成高精度的地形图,为城市规划和灾害评估提供支持。在目标识别中,可以利用SAR数据识别战场上的目标,提高军事侦察能力。未来,该技术有望在更多领域得到应用,例如医学成像、工业检测等。
📄 摘要(原文)
Synthetic aperture radar (SAR) is a tomographic sensor that measures 2D slices of the 3D spatial Fourier transform of the scene. In many operational scenarios, the measured set of 2D slices does not fill the 3D space in the Fourier domain, resulting in significant artifacts in the reconstructed imagery. Traditionally, simple priors, such as sparsity in the image domain, are used to regularize the inverse problem. In this paper, we review our recent work that achieves state-of-the-art results in 3D SAR imaging employing neural structures to model the surface scattering that dominates SAR returns. These neural structures encode the surface of the objects in the form of a signed distance function learned from the sparse scattering data. Since estimating a smooth surface from a sparse and noisy point cloud is an ill-posed problem, we regularize the surface estimation by sampling points from the implicit surface representation during the training step. We demonstrate the model's ability to represent target scattering using measured and simulated data from single vehicles and a larger scene with a large number of vehicles. We conclude with future research directions calling for methods to learn complex-valued neural representations to enable synthesizing new collections from the volumetric neural implicit representation.