Breaking the Sub-Millimeter Barrier: Eyeframe Acquisition from Color Images
作者: Manel Guzmán, Antonio Agudo
分类: cs.CV
发布日期: 2026-02-18
备注: Accepted to CAI 2026
💡 一句话要点
提出基于多视角彩色图像的眼镜框亚毫米级精确轮廓提取方法
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 眼镜框轮廓提取 多视角视觉 深度估计 图像分割 计算机视觉 亚毫米级精度 3D重建
📋 核心要点
- 传统眼镜框追踪依赖机械工具,精度要求高,操作复杂,效率低下,是行业痛点。
- 论文提出一种基于多视角彩色图像的视觉方案,结合图像分割、深度估计和多视角融合,实现高精度镜框轮廓提取。
- 实验表明,该方法在真实数据上表现出竞争力,无需专用设备,简化了验光师的工作流程。
📝 摘要(中文)
本文提出了一种基于人工智能视觉的眼镜框镜片追踪新方法,旨在突破亚毫米级精度壁垒。传统镜框追踪依赖于精确定位和校准的机械工具,耗时且需要额外设备,导致验光师工作流程效率低下。该方法利用多视角信息,处理来自InVision系统捕获的图像。完整流程包括图像采集、镜框分割以隔离背景、深度估计以获取3D空间信息,以及多视角处理,将分割的RGB图像与深度数据集成,以实现精确的镜框轮廓测量。通过在真实数据上分析不同的配置和变体,该方法在静态彩色图像上实现了与其他解决方案相比具有竞争力的测量结果,同时消除了对专用追踪设备的需求,并降低了光学技术人员的工作流程复杂性。
🔬 方法详解
问题定义:传统眼镜框轮廓追踪依赖于机械工具,需要精确定位和校准,操作繁琐且耗时,增加了验光师的工作负担。现有方法难以在保证亚毫米级精度的同时,简化操作流程并降低设备成本。
核心思路:论文的核心思路是利用计算机视觉技术,通过分析多视角彩色图像,提取眼镜框的3D轮廓信息。通过图像分割、深度估计和多视角融合,克服了传统机械追踪的局限性,实现了高精度、低成本的眼镜框轮廓提取。
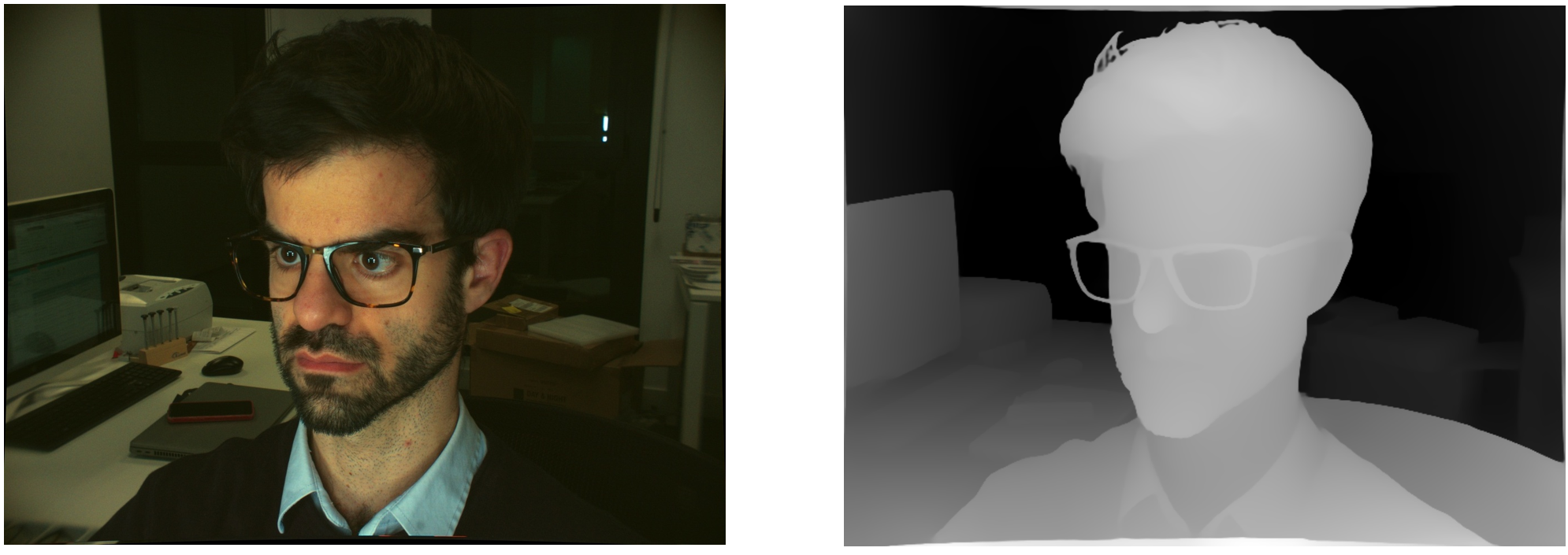
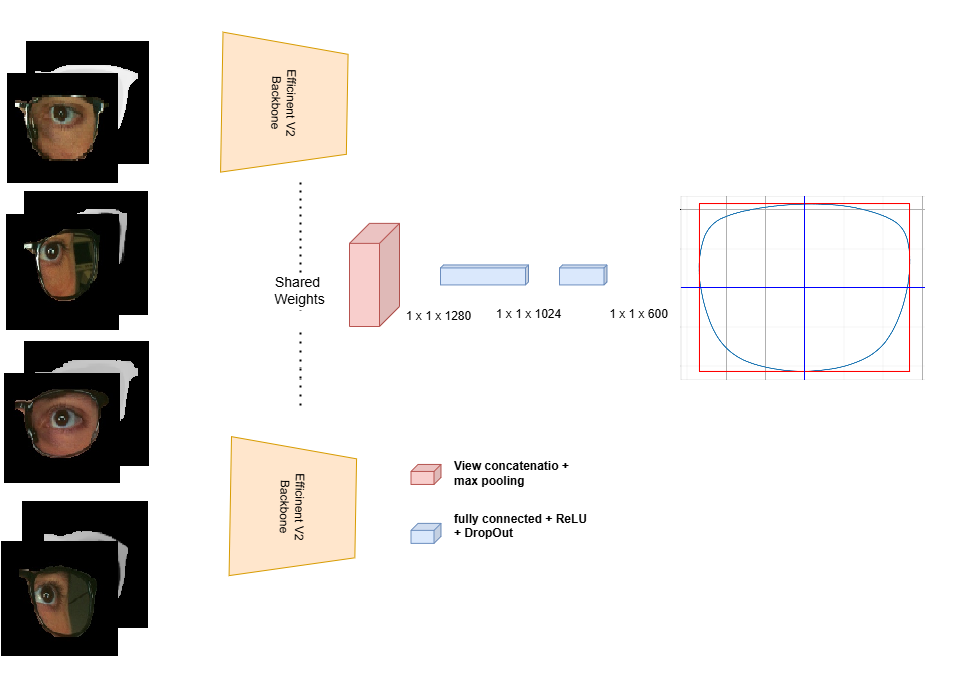
技术框架:该方法的技术框架主要包括以下几个阶段:1) 图像采集:使用InVision系统从多个角度捕获眼镜框的彩色图像。2) 镜框分割:从图像中分割出眼镜框区域,去除背景干扰。3) 深度估计:利用多视角图像估计眼镜框的深度信息,获得3D空间数据。4) 多视角处理:将分割的RGB图像与深度数据进行融合,利用多视角信息优化轮廓提取结果。
关键创新:该方法最重要的创新点在于将多视角视觉技术应用于眼镜框轮廓提取,通过融合RGB图像和深度信息,实现了亚毫米级的精度。与传统的机械追踪方法相比,该方法无需专用设备,降低了成本,并简化了操作流程。
关键设计:论文中提出了不同的配置和变体,用于图像分割、深度估计和多视角融合。具体的参数设置、损失函数和网络结构等技术细节在论文中进行了详细描述和分析。例如,深度估计可能采用了基于立体视觉的算法,多视角融合可能采用了加权平均或优化方法。
🖼️ 关键图片

📊 实验亮点
该论文在真实数据集上进行了实验验证,结果表明,该方法在静态彩色图像上实现了与其他解决方案相比具有竞争力的测量结果。具体的性能数据(如精度、召回率等)以及与基线方法的对比结果需要在论文中查找。该方法的主要优势在于无需专用追踪设备,降低了成本,并简化了操作流程。
🎯 应用场景
该研究成果可广泛应用于眼镜制造、验光配镜等领域。通过自动化、高精度的眼镜框轮廓提取,可以提高生产效率,降低人工成本,并为用户提供更个性化、更舒适的眼镜佩戴体验。未来,该技术有望应用于在线眼镜试戴、虚拟眼镜设计等新兴领域。
📄 摘要(原文)
Eyeframe lens tracing is an important process in the optical industry that requires sub-millimeter precision to ensure proper lens fitting and optimal vision correction. Traditional frame tracers rely on mechanical tools that need precise positioning and calibration, which are time-consuming and require additional equipment, creating an inefficient workflow for opticians. This work presents a novel approach based on artificial vision that utilizes multi-view information. The proposed algorithm operates on images captured from an InVision system. The full pipeline includes image acquisition, frame segmentation to isolate the eyeframe from background, depth estimation to obtain 3D spatial information, and multi-view processing that integrates segmented RGB images with depth data for precise frame contour measurement. To this end, different configurations and variants are proposed and analyzed on real data, providing competitive measurements from still color images with respect to other solutions, while eliminating the need for specialized tracing equipment and reducing workflow complexity for optical technicians.