PuriLight: A Lightweight Shuffle and Purification Framework for Monocular Depth Estimation
作者: Yujie Chen, Li Zhang, Xiaomeng Chu, Tian Zhang
分类: cs.CV
发布日期: 2026-02-11
备注: 8 pages, 6figures, accepted by European Conference on Artificial Intelligence (ECAI2025)
🔗 代码/项目: GITHUB
💡 一句话要点
PuriLight:一种轻量级的单目深度估计洗牌与净化框架
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 单目深度估计 自监督学习 轻量级网络 特征提取 注意力机制
📋 核心要点
- 现有自监督单目深度估计方法在计算效率和结构细节保持方面存在瓶颈,要么模型庞大,要么精度不足。
- PuriLight通过三阶段架构,结合SDC、RAKA和DFSP模块,实现轻量级和精确的特征提取与处理。
- 实验结果表明,PuriLight在保持卓越计算效率的同时,以最少的训练参数实现了最先进的性能。
📝 摘要(中文)
本文提出PuriLight,一个轻量级且高效的自监督单目深度估计框架,旨在解决计算效率和细节保持的双重挑战。虽然自监督深度估计的最新进展减少了对ground truth监督的依赖,但现有方法仍然受到架构臃肿(牺牲了实用性)或轻量级模型(牺牲了结构精度)的限制。这些双重限制突显了开发轻量级但结构精确的架构的关键需求。我们的框架通过一个三阶段架构来解决这些限制,该架构包含三个新颖的模块:用于局部特征提取的Shuffle-Dilation Convolution (SDC)模块,用于分层特征增强的Rotation-Adaptive Kernel Attention (RAKA)模块,以及用于全局特征净化的Deep Frequency Signal Purification (DFSP)模块。通过有效的协作,这些模块使PuriLight能够实现轻量级和精确的特征提取和处理。大量实验表明,PuriLight以最少的训练参数实现了最先进的性能,同时保持了卓越的计算效率。代码将在https://github.com/ishrouder/PuriLight上提供。
🔬 方法详解
问题定义:论文旨在解决自监督单目深度估计中,现有方法在计算效率和深度细节保持之间的trade-off问题。现有方法要么模型体积庞大,计算资源消耗高,难以部署;要么为了轻量化而牺牲了深度估计的精度,尤其是在结构细节的重建上表现不佳。
核心思路:论文的核心思路是通过设计一种轻量级的网络架构,并结合特定的模块来提升特征提取和处理的效率和精度。通过局部特征提取、分层特征增强和全局特征净化三个阶段,逐步提升深度估计的质量。这种设计旨在在参数量、计算复杂度和精度之间找到一个平衡点。
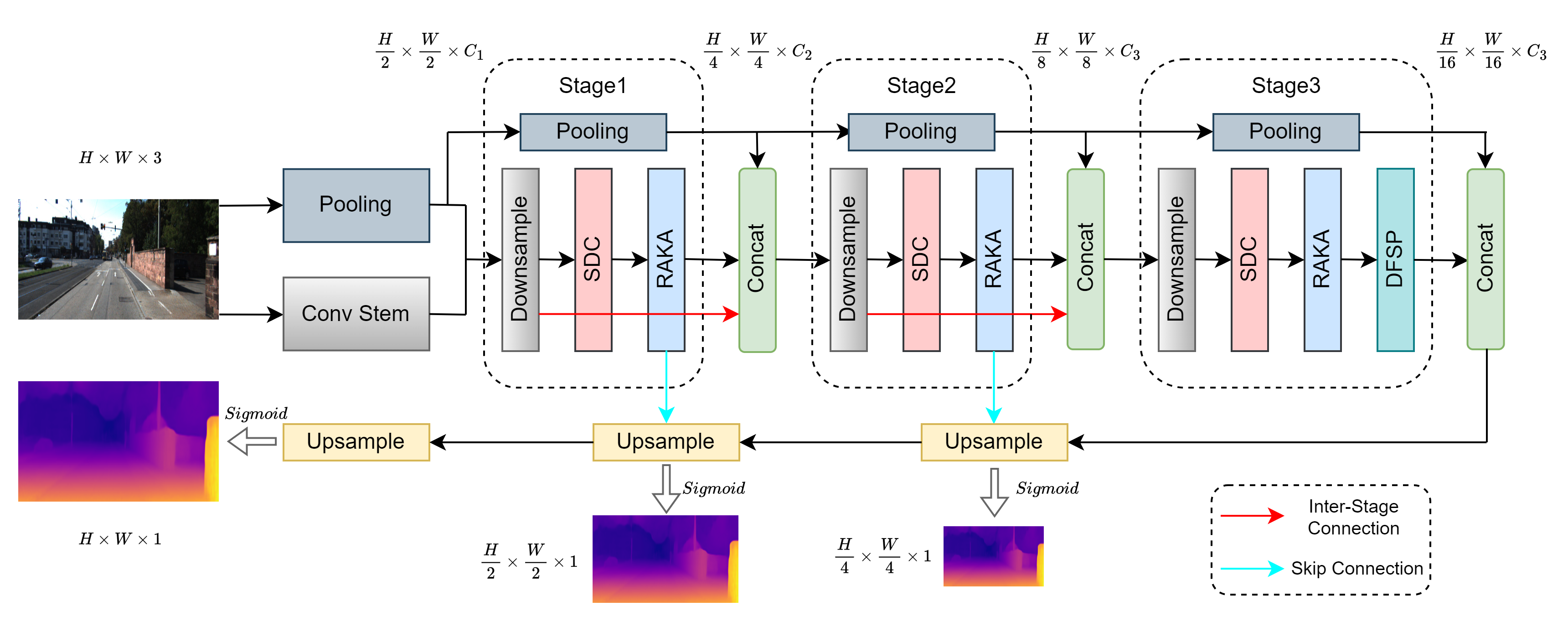
技术框架:PuriLight框架包含三个主要阶段:1) 局部特征提取阶段,使用Shuffle-Dilation Convolution (SDC) 模块提取局部特征。2) 分层特征增强阶段,使用Rotation-Adaptive Kernel Attention (RAKA) 模块进行分层特征增强。3) 全局特征净化阶段,使用Deep Frequency Signal Purification (DFSP) 模块进行全局特征净化。这三个阶段协同工作,实现轻量级和精确的深度估计。
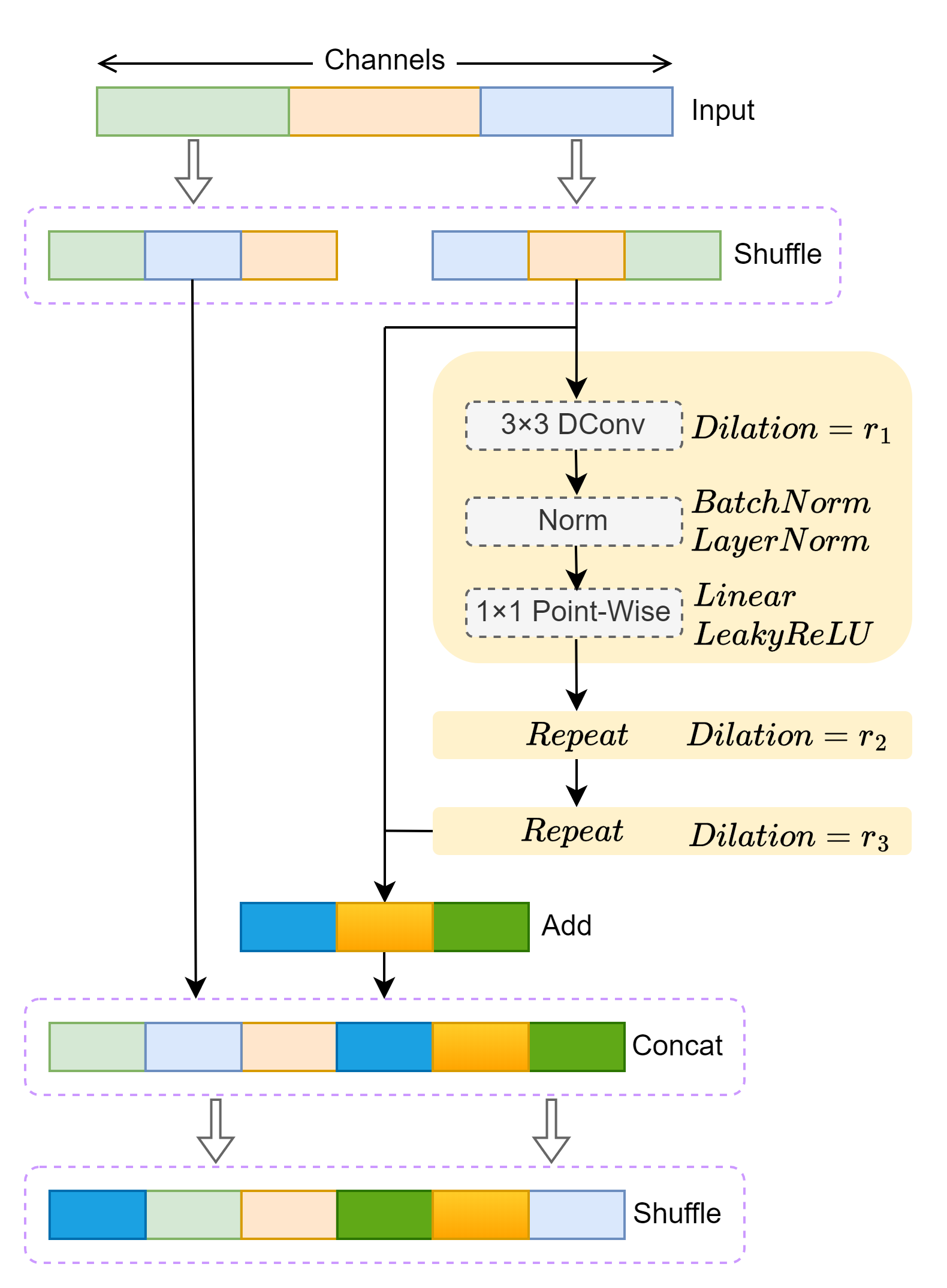
关键创新:论文的关键创新在于三个模块的设计:SDC模块通过shuffle操作和空洞卷积,在减少计算量的同时扩大感受野;RAKA模块通过旋转自适应的核注意力机制,增强特征之间的关系;DFSP模块通过深度频率信号净化,去除噪声并提升全局一致性。这三个模块的组合是PuriLight能够实现高性能的关键。
关键设计:SDC模块的具体实现包括shuffle操作的通道数、空洞卷积的空洞率等参数设置。RAKA模块的关键在于旋转核的设计和注意力机制的实现。DFSP模块的关键在于频率信号分解和净化的方法。损失函数方面,可能采用了光度一致性损失、平滑损失等常用的自监督深度估计损失函数,具体细节需要在论文中进一步确认。
🖼️ 关键图片

📊 实验亮点
PuriLight在自监督单目深度估计任务上取得了state-of-the-art的性能,同时保持了极低的参数量和计算复杂度。具体性能数据需要在论文中查看,但摘要中强调了其在参数量和计算效率方面的优势,表明其在轻量级深度估计领域具有显著的优势。
🎯 应用场景
PuriLight在自动驾驶、机器人导航、虚拟现实/增强现实等领域具有广泛的应用前景。其轻量级的特性使其能够部署在资源受限的移动设备或嵌入式系统中,实现实时的深度感知。高精度的深度估计能力可以提升环境理解的准确性,从而改善相关应用的用户体验和性能。
📄 摘要(原文)
We propose PuriLight, a lightweight and efficient framework for self-supervised monocular depth estimation, to address the dual challenges of computational efficiency and detail preservation. While recent advances in self-supervised depth estimation have reduced reliance on ground truth supervision, existing approaches remain constrained by either bulky architectures compromising practicality or lightweight models sacrificing structural precision. These dual limitations underscore the critical need to develop lightweight yet structurally precise architectures. Our framework addresses these limitations through a three-stage architecture incorporating three novel modules: the Shuffle-Dilation Convolution (SDC) module for local feature extraction, the Rotation-Adaptive Kernel Attention (RAKA) module for hierarchical feature enhancement, and the Deep Frequency Signal Purification (DFSP) module for global feature purification. Through effective collaboration, these modules enable PuriLight to achieve both lightweight and accurate feature extraction and processing. Extensive experiments demonstrate that PuriLight achieves state-of-the-art performance with minimal training parameters while maintaining exceptional computational efficiency. Codes will be available at https://github.com/ishrouder/PuriLight.