PhysDrape: Learning Explicit Forces and Collision Constraints for Physically Realistic Garment Draping
作者: Minghai Chen, Mingyuan Liu, Yuxiang Huan
分类: cs.CV
发布日期: 2026-02-08
💡 一句话要点
PhysDrape:通过显式力和碰撞约束学习物理真实的服装悬垂
🎯 匹配领域: 支柱四:生成式动作 (Generative Motion)
关键词: 服装悬垂 物理模拟 深度学习 图神经网络 碰撞检测 可微渲染 物理信息网络
📋 核心要点
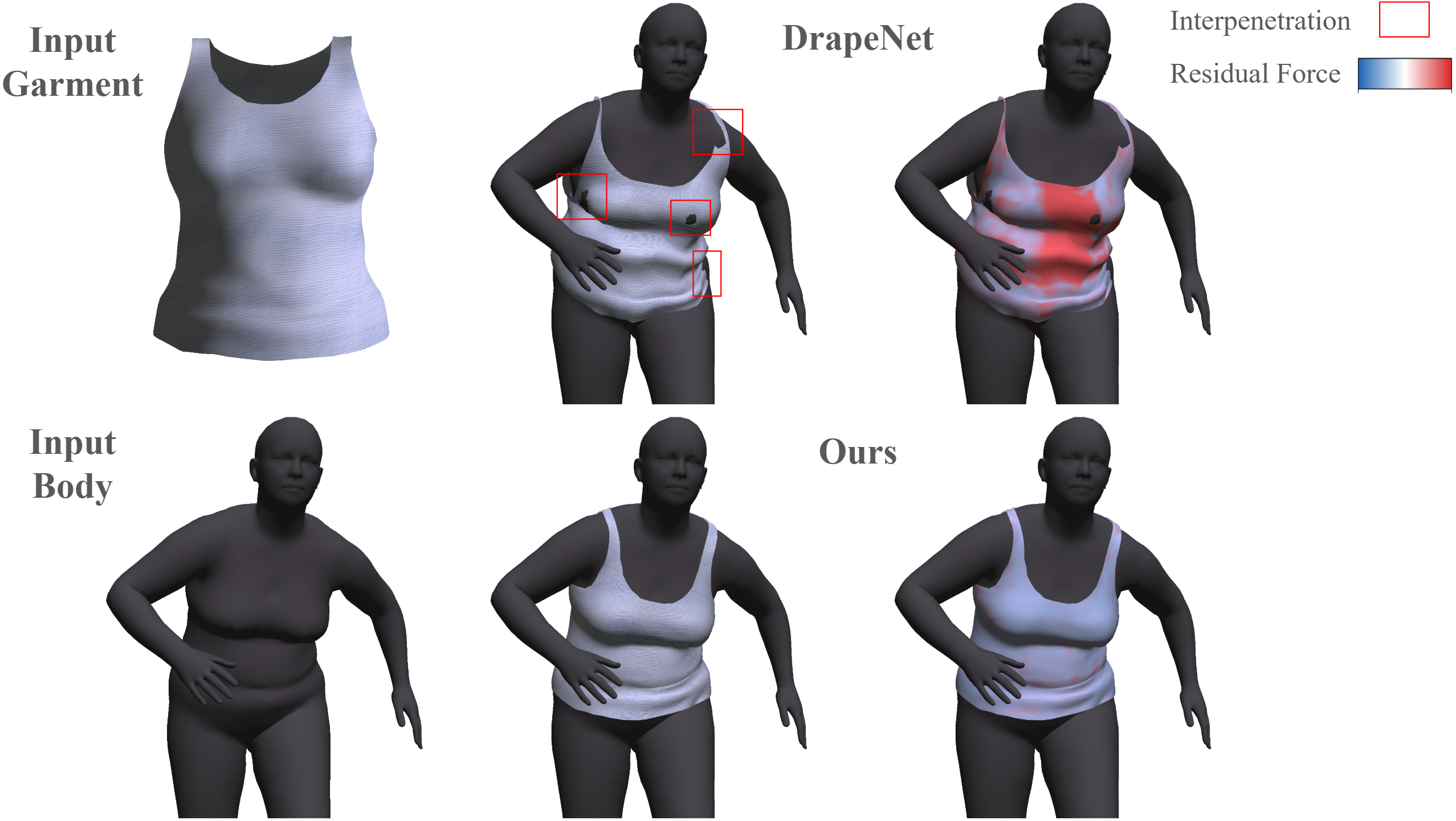
- 现有服装悬垂方法依赖软惩罚处理碰撞,导致几何可行性与物理合理性之间存在权衡,难以同时保证形状和避免穿透。
- PhysDrape提出一种混合神经-物理求解器,通过显式力和约束驱动服装悬垂,利用可微的力求解器和投影严格执行物理约束。
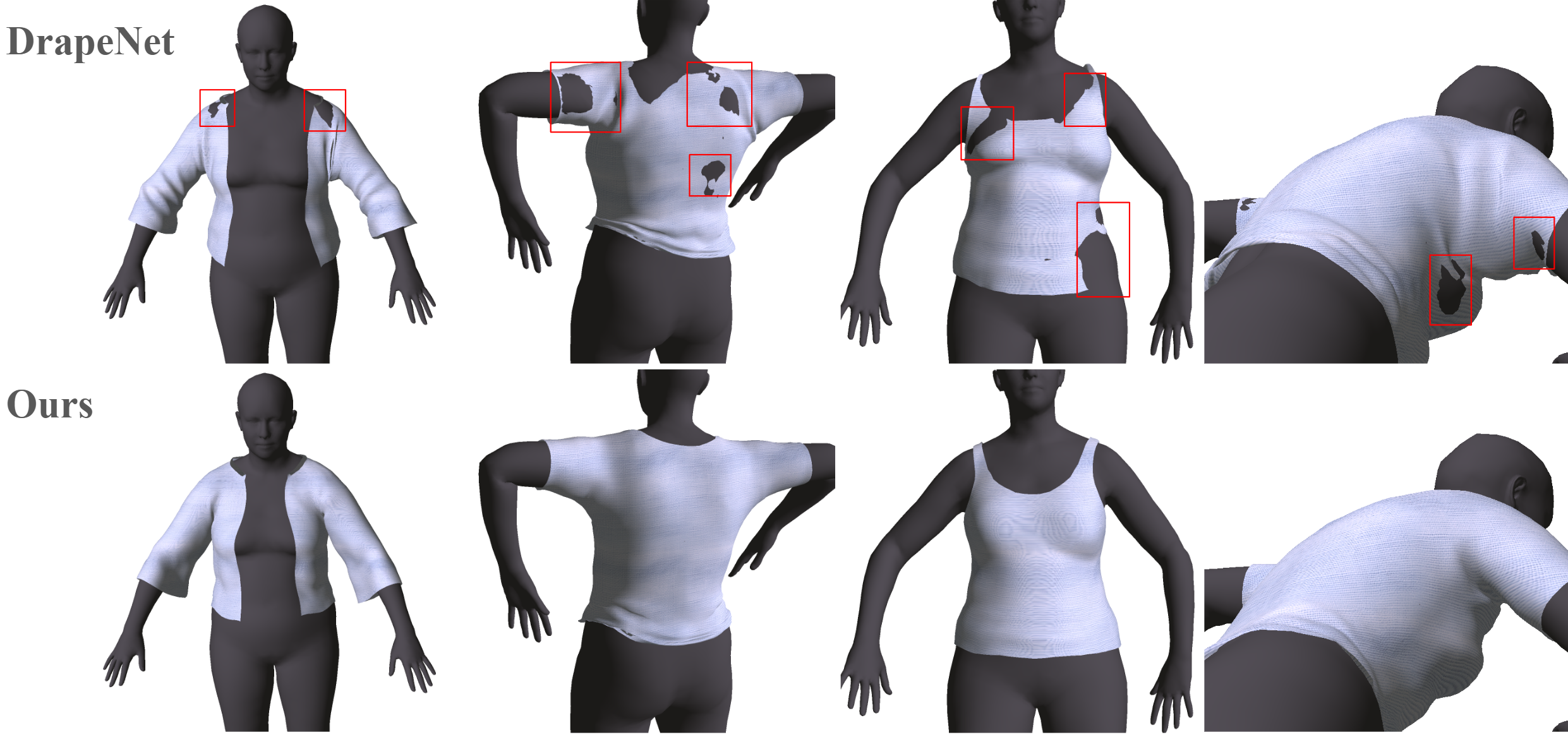
- 实验表明,PhysDrape在保证可忽略的相互渗透的同时,显著降低了应变能,实现了优于现有方法的物理保真度和鲁棒性。
📝 摘要(中文)
基于深度学习的服装悬垂技术已成为传统基于物理的模拟(PBS)的一种有前景的替代方案,但鲁棒的碰撞处理仍然是一个关键瓶颈。现有方法大多通过软惩罚来强制物理有效性,从而在几何可行性和物理合理性之间产生内在的权衡:惩罚碰撞通常会扭曲网格结构,而保持形状会导致相互渗透。为了解决这个冲突,我们提出了PhysDrape,一种由显式力和约束驱动的混合神经-物理求解器,用于物理真实的服装悬垂。与软约束框架不同,PhysDrape将神经推理与显式几何求解器集成在一个完全可微的管道中。具体来说,我们提出了一个以物理增强图为条件的物理信息图神经网络——编码材料参数和身体邻近度——来预测残余位移。至关重要的是,我们集成了一个可微的两阶段求解器:首先,一个可学习的力求解器迭代地解决源自Saint Venant-Kirchhoff(StVK)模型的不平衡力,以确保准静态平衡;其次,一个可微投影严格执行针对身体表面的碰撞约束。这种可微设计通过显式约束保证了物理有效性,同时支持端到端学习,以优化网络以获得物理一致的预测。大量的实验表明,PhysDrape实现了最先进的性能,确保了可忽略的相互渗透,并且与现有基线相比具有显著更低的应变能,从而在实时性方面实现了卓越的物理保真度和鲁棒性。
🔬 方法详解
问题定义:论文旨在解决服装悬垂模拟中,现有基于深度学习的方法在处理碰撞时存在的不足。现有方法通常采用软约束的方式,即通过惩罚项来避免碰撞,但这种方式容易导致网格变形或物体相互穿透,无法同时保证几何形状的合理性和物理的真实性。
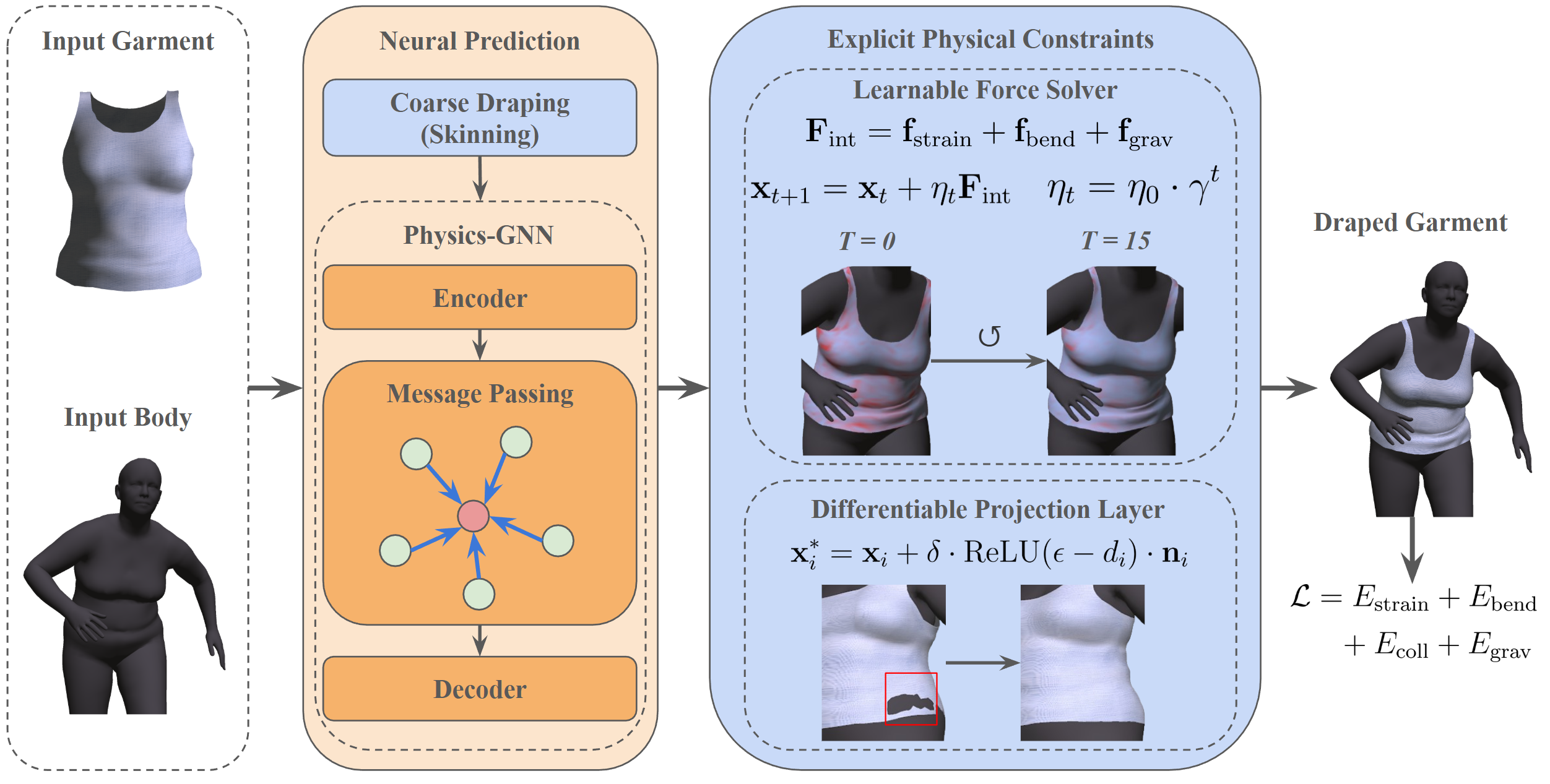
核心思路:PhysDrape的核心思路是将神经推理与显式几何求解器相结合,构建一个完全可微的混合框架。该框架通过神经网络预测残余位移,并利用可微的力求解器和投影来显式地处理力和碰撞约束,从而保证物理的有效性。这种设计避免了软约束方法中的权衡,能够更准确地模拟服装的悬垂效果。
技术框架:PhysDrape的整体框架包含以下几个主要模块: 1. 物理信息图神经网络 (Physics-Informed Graph Neural Network):该网络以物理增强图为输入,图的节点表示服装网格的顶点,边表示顶点之间的连接关系,并编码了材料参数和身体邻近度等信息。网络输出残余位移。 2. 可学习的力求解器 (Learnable Force Solver):该模块基于Saint Venant-Kirchhoff (StVK) 模型计算服装网格上的不平衡力,并通过迭代的方式求解,以达到准静态平衡。 3. 可微投影 (Differentiable Projection):该模块用于严格执行碰撞约束,防止服装与人体模型发生穿透。该模块通过可微的投影操作,将服装网格顶点投影到人体模型的表面,从而消除穿透。
关键创新:PhysDrape的关键创新在于其混合神经-物理的框架,以及其中可微的力求解器和投影模块。与传统的基于物理的模拟方法相比,PhysDrape利用神经网络学习服装的形变模式,从而提高了模拟的效率和准确性。与现有的基于深度学习的方法相比,PhysDrape通过显式地处理力和碰撞约束,避免了软约束方法中的权衡,从而保证了物理的真实性。
关键设计: * 物理信息图神经网络:网络结构未知,但输入包含物理信息,输出残余位移。 * 力求解器:基于Saint Venant-Kirchhoff (StVK) 模型,迭代求解不平衡力。 * 可微投影:具体实现未知,但需要保证可微性,以便进行端到端训练。 * 损失函数:未知,但需要包含物理一致性相关的损失项,例如应变能。
🖼️ 关键图片
📊 实验亮点
PhysDrape在服装悬垂模拟方面取得了显著的性能提升。实验结果表明,PhysDrape能够生成具有可忽略的相互渗透的服装悬垂效果,并且与现有基线相比,应变能显著降低。这意味着PhysDrape在保证几何形状合理性的同时,也提高了物理的真实性。此外,PhysDrape还具有实时性,能够满足虚拟试衣等实时应用的需求。
🎯 应用场景
PhysDrape具有广泛的应用前景,包括虚拟试衣、游戏角色服装设计、电影特效制作等。该技术可以用于生成逼真的服装悬垂效果,提高虚拟环境的真实感和沉浸感。此外,PhysDrape还可以用于服装设计和生产,帮助设计师快速评估服装的穿着效果,并优化服装的版型。
📄 摘要(原文)
Deep learning-based garment draping has emerged as a promising alternative to traditional Physics-Based Simulation (PBS), yet robust collision handling remains a critical bottleneck. Most existing methods enforce physical validity through soft penalties, creating an intrinsic trade-off between geometric feasibility and physical plausibility: penalizing collisions often distorts mesh structure, while preserving shape leads to interpenetration. To resolve this conflict, we present PhysDrape, a hybrid neural-physical solver for physically realistic garment draping driven by explicit forces and constraints. Unlike soft-constrained frameworks, PhysDrape integrates neural inference with explicit geometric solvers in a fully differentiable pipeline. Specifically, we propose a Physics-Informed Graph Neural Network conditioned on a physics-enriched graph -- encoding material parameters and body proximity -- to predict residual displacements. Crucially, we integrate a differentiable two-stage solver: first, a learnable Force Solver iteratively resolves unbalanced forces derived from the Saint Venant-Kirchhoff (StVK) model to ensure quasi-static equilibrium; second, a Differentiable Projection strictly enforces collision constraints against the body surface. This differentiable design guarantees physical validity through explicit constraints, while enabling end-to-end learning to optimize the network for physically consistent predictions. Extensive experiments demonstrate that PhysDrape achieves state-of-the-art performance, ensuring negligible interpenetration with significantly lower strain energy compared to existing baselines, achieving superior physical fidelity and robustness in real-time.