An Integer Linear Programming Approach to Geometrically Consistent Partial-Partial Shape Matching
作者: Viktoria Ehm, Paul Roetzer, Florian Bernard, Daniel Cremers
分类: cs.CV
发布日期: 2026-02-06
💡 一句话要点
提出一种基于整数线性规划的几何一致性部分-部分三维形状匹配方法
🎯 匹配领域: 支柱七:动作重定向 (Motion Retargeting)
关键词: 三维形状匹配 部分-部分匹配 整数线性规划 几何一致性 三维重建
📋 核心要点
- 部分-部分三维形状匹配因其需要同时确定对应关系和重叠区域而极具挑战性,现有方法难以兼顾精度和效率。
- 该论文提出了一种基于整数线性规划的方法,利用几何一致性作为强先验,从而实现对重叠区域的稳健估计和邻域保持的对应关系计算。
- 实验结果表明,该方法在匹配误差和平滑度方面均表现出色,且比现有方法更具可扩展性,适用于实际三维扫描等应用。
📝 摘要(中文)
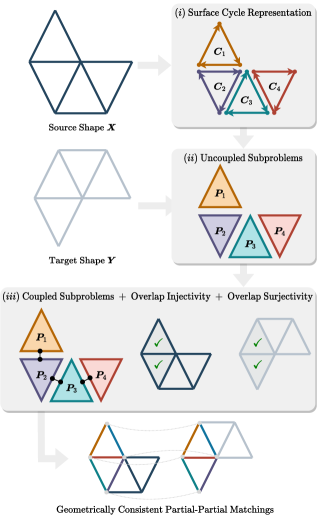
三维形状之间的对应关系建立是计算机视觉中一个长期存在的挑战。虽然大量的研究致力于完整-完整和部分-完整的三维形状匹配,但只有少数工作探索了部分-部分匹配,这很可能是由于其独特的挑战:我们必须计算精确的对应关系,同时找到未知的重叠区域。然而,部分-部分三维形状匹配反映了最真实的场景,因为在许多实际案例中,例如三维扫描,形状只是部分可观察的。在这项工作中,我们提出了第一个专门为解决部分-部分形状匹配的独特挑战而设计的整数线性规划方法。我们的方法利用几何一致性作为强先验,从而能够稳健地估计重叠区域并计算保持邻域关系的对应关系。我们通过实验证明,我们的方法在匹配误差和平滑度方面都实现了高质量的匹配结果。此外,我们表明我们的方法比以前的形式更具可扩展性。
🔬 方法详解
问题定义:论文旨在解决部分-部分三维形状匹配问题,即在两个三维形状只有部分重叠的情况下,找到它们之间的对应关系并确定重叠区域。现有方法在处理这种场景时,往往难以在保证匹配精度的同时,有效地处理未知的重叠区域,计算复杂度也较高。
核心思路:论文的核心思路是将部分-部分形状匹配问题建模为一个整数线性规划(ILP)问题,并利用几何一致性作为强先验知识。通过优化一个目标函数,同时考虑对应关系的质量和几何一致性,从而实现对重叠区域的稳健估计和高质量的对应关系计算。
技术框架:该方法首先提取两个三维形状的特征点,然后构建一个候选对应关系集合。接下来,将形状匹配问题转化为一个整数线性规划问题,其中变量表示对应关系的选择。目标函数包括两部分:一部分衡量对应关系的质量(例如,基于特征描述符的相似度),另一部分衡量对应关系的几何一致性(例如,保持邻域关系)。通过求解该ILP问题,可以得到最优的对应关系集合和重叠区域。
关键创新:该方法最重要的创新在于将部分-部分形状匹配问题建模为一个整数线性规划问题,并显式地利用了几何一致性作为强先验。与现有方法相比,该方法能够更有效地处理未知的重叠区域,并获得更稳健和高质量的匹配结果。此外,ILP的建模方式使得可以方便地加入各种约束条件,例如对应关系的一一对应性等。
关键设计:目标函数的设计是关键。它需要平衡对应关系的质量和几何一致性。几何一致性可以通过多种方式来衡量,例如,可以使用邻域保持约束,即如果两个点在源形状上是邻居,那么它们在目标形状上的对应点也应该是邻居。此外,ILP求解器的选择也会影响算法的效率。论文中可能使用了特定的ILP求解器或优化策略来提高求解速度。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法在匹配误差和平滑度方面均优于现有方法。更重要的是,该方法在处理大规模数据集时表现出更好的可扩展性,这使得它更适用于实际应用场景。具体的性能提升数据(例如,匹配误差降低百分比,运行时间缩短百分比)未知,需要在论文中查找。
🎯 应用场景
该研究成果可广泛应用于三维重建、物体识别、机器人导航等领域。例如,在三维扫描中,由于遮挡或扫描角度限制,获取的形状往往是不完整的。该方法可以用于将多个部分扫描结果进行对齐和融合,从而得到更完整的模型。此外,在机器人导航中,机器人可以通过匹配部分观测到的环境地图与已知的地图,实现定位和路径规划。
📄 摘要(原文)
The task of establishing correspondences between two 3D shapes is a long-standing challenge in computer vision. While numerous studies address full-full and partial-full 3D shape matching, only a limited number of works have explored the partial-partial setting, very likely due to its unique challenges: we must compute accurate correspondences while at the same time find the unknown overlapping region. Nevertheless, partial-partial 3D shape matching reflects the most realistic setting, as in many real-world cases, such as 3D scanning, shapes are only partially observable. In this work, we introduce the first integer linear programming approach specifically designed to address the distinctive challenges of partial-partial shape matching. Our method leverages geometric consistency as a strong prior, enabling both robust estimation of the overlapping region and computation of neighbourhood-preserving correspondences. We empirically demonstrate that our approach achieves high-quality matching results both in terms of matching error and smoothness. Moreover, we show that our method is more scalable than previous formalisms.