POPL-KF: A Pose-Only Geometric Representation-Based Kalman Filter for Point-Line-Based Visual-Inertial Odometry
作者: Aiping Wang, Zhaolong Yang, Shuwen Chen, Hai Zhang
分类: cs.CV
发布日期: 2026-02-06
💡 一句话要点
提出POPL-KF,一种基于位姿几何表示的点线视觉惯性里程计,提升复杂场景定位精度。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics) 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 视觉惯性里程计 卡尔曼滤波 点线特征 位姿估计 几何表示
📋 核心要点
- 传统VIO系统依赖点特征,在复杂场景下性能受限,且MSCKF存在线性化误差和延迟更新问题。
- 提出POPL-KF,核心在于使用点和线特征的仅位姿几何表示,消除特征坐标,实现即时更新。
- 实验表明,POPL-KF在公共数据集和真实场景中优于现有滤波和优化方法,并保持实时性。
📝 摘要(中文)
主流的视觉惯性里程计(VIO)系统依赖于点特征进行运动估计和定位,但在复杂场景中性能会下降。此外,基于多状态约束卡尔曼滤波器(MSCKF)的VIO系统的定位精度受到与特征3D坐标相关的线性化误差和延迟测量更新的影响。为了提高VIO在复杂场景中的性能,我们首先提出了一种用于线特征的仅位姿几何表示。在此基础上,我们开发了POPL-KF,这是一种基于卡尔曼滤波器的VIO系统,它对点和线特征都采用仅位姿几何表示。POPL-KF通过显式地从测量方程中消除点和线特征坐标来减轻线性化误差,同时能够立即更新视觉测量。我们还为点和线特征设计了一种统一的基础帧选择算法,以确保仅位姿测量模型中对相机位姿的最佳约束。为了进一步提高线特征质量,提出了一种基于图像网格分割和双向光流一致性的线特征滤波器。我们的系统在公共数据集和真实世界实验中进行了评估,结果表明POPL-KF优于最先进的(SOTA)基于滤波器的方法(OpenVINS, PO-KF)和基于优化的方法(PL-VINS, EPLF-VINS),同时保持了实时性能。
🔬 方法详解
问题定义:现有VIO系统在复杂场景下,由于依赖点特征和MSCKF的线性化误差,定位精度下降。特别是基于MSCKF的VIO系统,其特征3D坐标的线性化以及延迟测量更新会进一步降低性能。因此,需要一种更鲁棒、更精确的VIO方案,能在复杂环境下有效利用点和线特征。
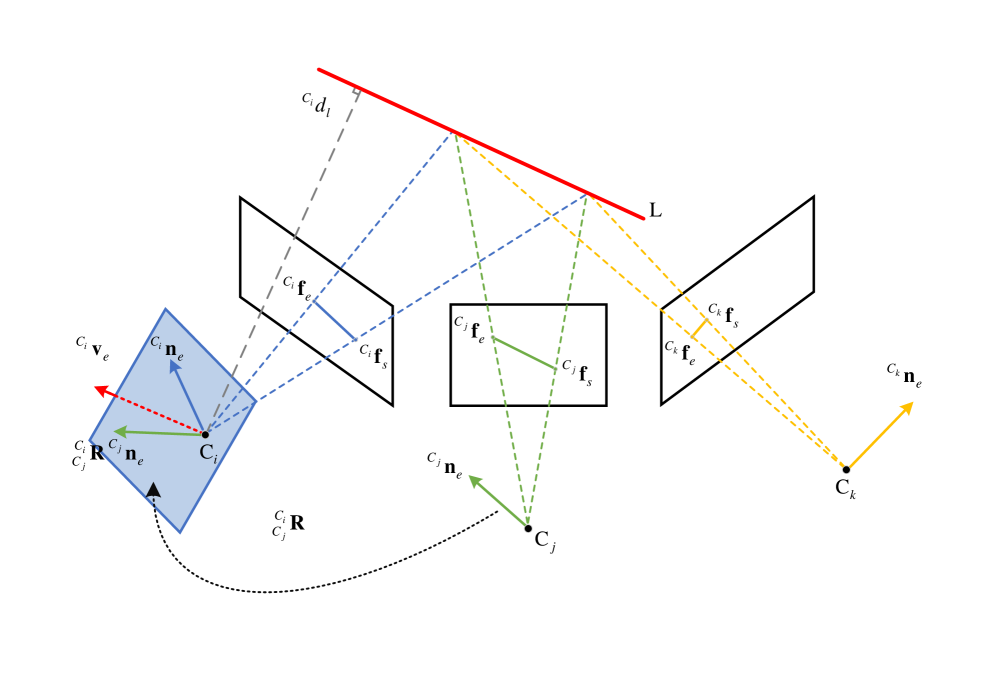
核心思路:POPL-KF的核心思路是采用“仅位姿”的几何表示,将点和线特征的3D坐标从状态向量中移除,从而避免了与这些坐标相关的线性化误差。通过这种方式,测量更新可以立即进行,而无需等待特征三角化或优化。此外,统一的基础帧选择算法确保了对相机位姿的最佳约束。
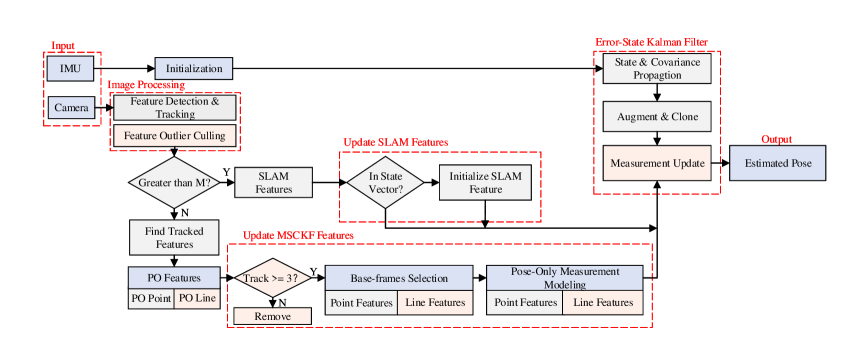
技术框架:POPL-KF系统主要包含以下几个模块:1) 线特征提取与过滤:使用基于图像网格分割和双向光流一致性的线特征滤波器,提高线特征的质量。2) 仅位姿几何表示:将点和线特征都表示为与相机位姿相关的几何约束,消除特征坐标。3) 卡尔曼滤波:使用卡尔曼滤波器进行状态估计和更新,融合视觉和惯性测量。4) 统一的基础帧选择:为点和线特征设计统一的基础帧选择算法,优化位姿约束。
关键创新:POPL-KF最关键的创新在于其“仅位姿”的几何表示。与传统方法不同,POPL-KF不直接估计点和线特征的3D坐标,而是将它们表示为相机位姿的函数。这种表示方式避免了与特征坐标相关的线性化误差,并允许立即更新视觉测量。此外,统一的基础帧选择算法也是一个重要的创新,它确保了对相机位姿的最佳约束。
关键设计:线特征滤波器基于图像网格分割和双向光流一致性,用于提高线特征的质量。统一的基础帧选择算法,根据特征与当前帧的距离和观测角度,选择最佳的基础帧,以最大化位姿约束。卡尔曼滤波器的状态向量包括相机位姿、速度、加速度计和陀螺仪的偏置。测量模型基于仅位姿几何表示,将点和线特征的观测表示为相机位姿的函数。
🖼️ 关键图片

📊 实验亮点
POPL-KF在公共数据集和真实世界实验中表现出色,优于OpenVINS、PO-KF等滤波方法以及PL-VINS、EPLF-VINS等优化方法。实验结果表明,POPL-KF在复杂场景下能够显著提高定位精度和鲁棒性,同时保持实时性能。
🎯 应用场景
POPL-KF适用于需要高精度和鲁棒性的视觉惯性导航应用,例如增强现实、机器人导航、无人机自主飞行等。尤其在光照变化剧烈、纹理稀疏或存在大量重复结构的复杂环境中,POPL-KF能够提供更可靠的定位和姿态估计,具有重要的实际应用价值。
📄 摘要(原文)
Mainstream Visual-inertial odometry (VIO) systems rely on point features for motion estimation and localization. However, their performance degrades in challenging scenarios. Moreover, the localization accuracy of multi-state constraint Kalman filter (MSCKF)-based VIO systems suffers from linearization errors associated with feature 3D coordinates and delayed measurement updates. To improve the performance of VIO in challenging scenes, we first propose a pose-only geometric representation for line features. Building on this, we develop POPL-KF, a Kalman filter-based VIO system that employs a pose-only geometric representation for both point and line features. POPL-KF mitigates linearization errors by explicitly eliminating both point and line feature coordinates from the measurement equations, while enabling immediate update of visual measurements. We also design a unified base-frames selection algorithm for both point and line features to ensure optimal constraints on camera poses within the pose-only measurement model. To further improve line feature quality, a line feature filter based on image grid segmentation and bidirectional optical flow consistency is proposed. Our system is evaluated on public datasets and real-world experiments, demonstrating that POPL-KF outperforms the state-of-the-art (SOTA) filter-based methods (OpenVINS, PO-KF) and optimization-based methods (PL-VINS, EPLF-VINS), while maintaining real-time performance.