Self-evolving Embodied AI
作者: Tongtong Feng, Xin Wang, Wenwu Zhu
分类: cs.ET, cs.CV
发布日期: 2026-02-04
💡 一句话要点
提出自进化具身智能,解决现有具身AI在动态开放环境中泛化性不足的问题
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 具身智能 自进化 自主学习 动态环境 机器人
📋 核心要点
- 现有具身AI在人工设定的环境中训练,难以适应具身可变和环境动态的真实场景。
- 自进化具身智能通过记忆、任务、环境、具身和模型的自适应进化,实现持续自主学习。
- 论文定义了自进化具身智能框架,并探讨了其组件、机制、应用和未来研究方向。
📝 摘要(中文)
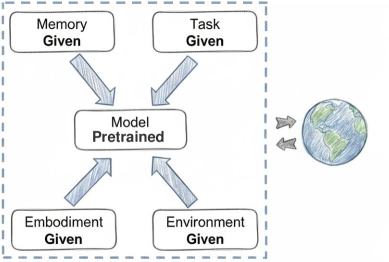
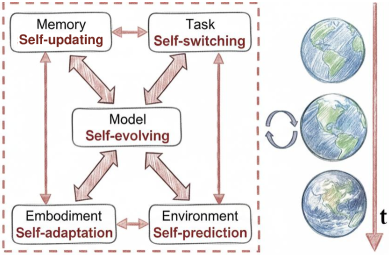
本文提出了一种新的具身人工智能范式:自进化具身智能。现有的具身AI通常局限于人工设计的环境,智能体在给定的记忆上训练,并为给定的任务构建模型,使得固定的具身能够与相对静态的环境交互。这种方法在具有可变具身和动态开放环境的实际场景中失效。自进化具身智能旨在通过记忆自更新、任务自切换、环境自预测、具身自适应和模型自进化,使智能体能够基于其不断变化的状态和环境进行操作,从而实现具有自主进化能力的持续自适应智能。本文具体介绍了自进化具身AI的定义、框架、组成部分和机制,系统地回顾了已实现组件的最新工作,讨论了实际应用,并指出了未来的研究方向。我们认为,自进化具身AI使智能体能够以类似人类的方式自主学习并与环境交互,并为通用人工智能提供了一个新的视角。
🔬 方法详解
问题定义:现有具身AI方法主要面临在动态开放环境中泛化性不足的问题。这些方法通常依赖于预定义的任务和静态环境,无法适应真实世界中具身的变化和环境的复杂性。现有方法的痛点在于缺乏自主学习和适应能力,难以应对未知的任务和环境变化。
核心思路:论文的核心思路是引入自进化的概念,使具身智能体能够自主地学习和适应不断变化的环境和任务。通过记忆自更新、任务自切换、环境自预测、具身自适应和模型自进化等机制,智能体可以不断地优化自身,从而实现持续的自适应智能。这种设计旨在模拟人类的学习和适应能力,使智能体能够像人类一样在复杂环境中生存和发展。
技术框架:自进化具身AI的整体框架包含以下几个主要模块:1) 记忆模块:负责存储和更新智能体的经验和知识。2) 任务模块:负责根据当前环境和智能体的状态选择合适的任务。3) 环境预测模块:负责预测环境的未来状态,为智能体的决策提供依据。4) 具身自适应模块:负责根据环境和任务调整智能体的具身形态和行为。5) 模型进化模块:负责优化智能体的模型,提高其性能和泛化能力。这些模块相互协作,共同实现智能体的自进化。
关键创新:最重要的技术创新点在于将自进化的概念引入具身智能领域。与传统的具身AI方法相比,自进化具身AI具有更强的自主学习和适应能力,能够更好地应对动态开放环境中的挑战。通过记忆自更新、任务自切换、环境自预测、具身自适应和模型自进化等机制,智能体可以不断地优化自身,从而实现持续的自适应智能。
关键设计:论文中没有明确给出关键参数设置、损失函数、网络结构等技术细节,这些细节可能因具体应用而异。但是,自进化具身AI的关键设计在于各个模块之间的协同工作和自进化机制的实现。例如,记忆模块需要设计合适的存储和更新策略,任务模块需要设计有效的任务选择算法,环境预测模块需要设计准确的环境预测模型,具身自适应模块需要设计灵活的具身控制策略,模型进化模块需要设计高效的模型优化算法。
🖼️ 关键图片
📊 实验亮点
由于该论文主要为概念性框架的提出,并无具体的实验结果展示。论文系统性地回顾了已实现组件的最新工作,为自进化具身智能的未来研究方向提供了指导。未来的研究可以关注如何有效地实现各个模块的自进化机制,以及如何将自进化具身智能应用于实际场景中。
🎯 应用场景
自进化具身智能在机器人、自动驾驶、智能家居等领域具有广泛的应用前景。它可以使机器人在未知环境中自主导航、操作和与人交互,提高机器人的智能化水平和适应能力。在自动驾驶领域,自进化具身智能可以使车辆更好地感知和理解复杂的交通环境,提高驾驶的安全性和可靠性。在智能家居领域,自进化具身智能可以使家居设备更好地理解用户的需求,提供个性化的服务。
📄 摘要(原文)
Embodied Artificial Intelligence (AI) is an intelligent system formed by agents and their environment through active perception, embodied cognition, and action interaction. Existing embodied AI remains confined to human-crafted setting, in which agents are trained on given memory and construct models for given tasks, enabling fixed embodiments to interact with relatively static environments. Such methods fail in in-the-wild setting characterized by variable embodiments and dynamic open environments. This paper introduces self-evolving embodied AI, a new paradigm in which agents operate based on their changing state and environment with memory self-updating, task self-switching, environment self-prediction, embodiment self-adaptation, and model self-evolution, aiming to achieve continually adaptive intelligence with autonomous evolution. Specifically, we present the definition, framework, components, and mechanisms of self-evolving embodied AI, systematically review state-of-the-art works for realized components, discuss practical applications, and point out future research directions. We believe that self-evolving embodied AI enables agents to autonomously learn and interact with environments in a human-like manner and provide a new perspective toward general artificial intelligence.