Real-Time Loop Closure Detection in Visual SLAM via NetVLAD and Faiss
作者: Enguang Fan
分类: cs.CV, cs.AI, cs.RO
发布日期: 2026-02-02
💡 一句话要点
利用NetVLAD和Faiss加速视觉SLAM中的实时回环检测
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 视觉SLAM 回环检测 NetVLAD Faiss 视觉定位
📋 核心要点
- 传统回环检测方法如DBoW在外观变化和感知混淆下表现不佳,限制了SLAM系统的鲁棒性。
- 论文提出使用NetVLAD作为回环检测模块,并利用Faiss加速最近邻搜索,以提高效率和准确性。
- 实验表明,NetVLAD在KITTI数据集上实现了实时查询速度,并在准确性和鲁棒性方面优于DBoW。
📝 摘要(中文)
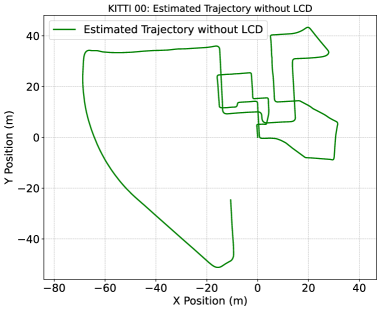
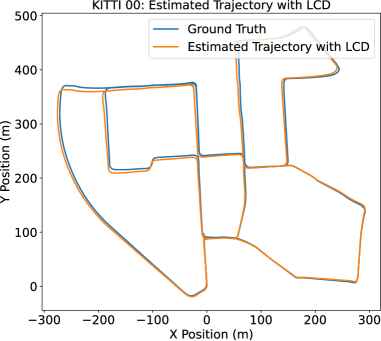
回环检测(LCD)是同步定位与地图构建(SLAM)的核心组成部分,它识别已访问过的地点,并启用姿态图约束来校正累积漂移。传统的词袋方法,如DBoW,虽然高效,但在外观变化和感知混淆下性能会下降。相比之下,基于深度学习的视觉地点识别(VPR)描述符(如NetVLAD和基于Transformer的模型)提供了更强的鲁棒性,但它们的计算成本通常被认为是实时SLAM的障碍。本文实证评估了NetVLAD作为LCD模块,并将其与KITTI数据集上的DBoW进行了比较。我们引入了一种细粒度的Top-K精确率-召回率曲线,更好地反映了LCD设置,其中查询可能具有零个或多个有效匹配项。借助Faiss加速的最近邻搜索,NetVLAD实现了实时查询速度,同时提高了相对于DBoW的准确性和鲁棒性,使其成为SLAM中LCD的实用替代方案。
🔬 方法详解
问题定义:论文旨在解决视觉SLAM中回环检测的准确性和实时性问题。现有的词袋模型(如DBoW)在外观变化剧烈或存在感知混淆时,容易产生误匹配或漏匹配,导致SLAM系统性能下降。而基于深度学习的VPR方法虽然鲁棒性更强,但计算复杂度较高,难以满足实时SLAM的需求。
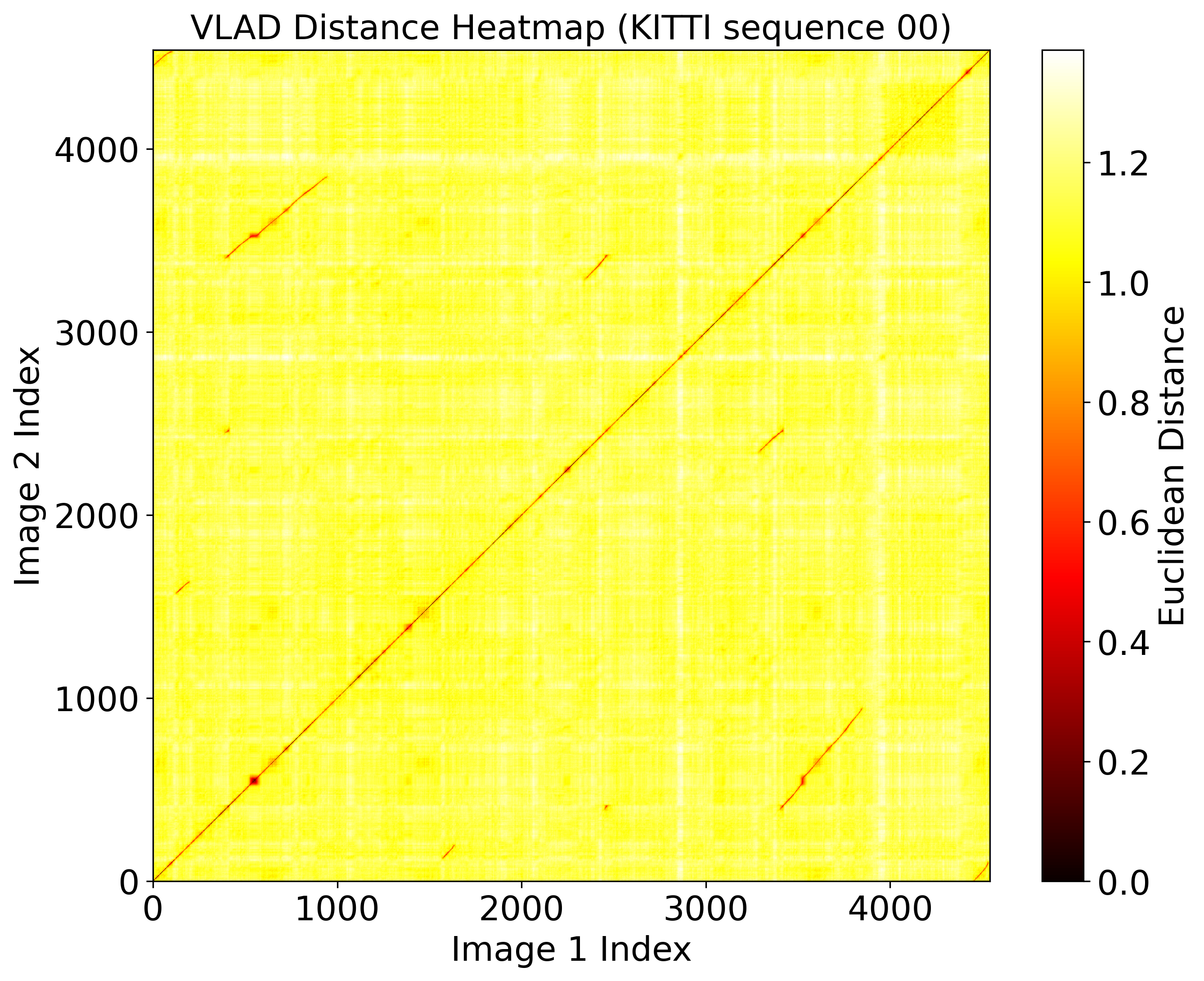
核心思路:论文的核心思路是利用NetVLAD提取图像的全局描述符,并使用Faiss库加速最近邻搜索,从而在保证准确性的同时,实现实时回环检测。NetVLAD能够有效地捕捉图像的全局特征,对光照、视角等变化具有较强的鲁棒性。Faiss库则提供了高效的向量索引和搜索算法,可以快速找到与查询图像最相似的图像。
技术框架:整体框架包括以下几个主要步骤:1) 使用预训练的NetVLAD模型提取当前帧图像的全局描述符。2) 使用Faiss库构建地图图像描述符的索引。3) 使用Faiss库在索引中搜索与当前帧描述符最相似的图像。4) 根据相似度得分判断是否检测到回环。5) 如果检测到回环,则将该回环信息加入到SLAM系统的姿态图中,进行全局优化。
关键创新:论文的关键创新在于将NetVLAD和Faiss库结合起来,用于解决视觉SLAM中的回环检测问题。这种方法既利用了NetVLAD的鲁棒性,又利用了Faiss库的高效性,从而实现了准确且实时的回环检测。此外,论文还提出了一种细粒度的Top-K精确率-召回率曲线,更准确地评估了回环检测算法的性能。
关键设计:论文使用了预训练的NetVLAD模型,该模型在大量图像数据上进行了训练,具有较强的泛化能力。在Faiss库中,论文使用了IVF(Inverted File)索引结构,该结构能够有效地减少搜索空间,提高搜索效率。此外,论文还对相似度得分进行了阈值处理,以减少误匹配的概率。具体参数设置未详细说明,属于未知信息。
🖼️ 关键图片
📊 实验亮点
实验结果表明,在KITTI数据集上,NetVLAD结合Faiss的方法在回环检测的准确性和实时性方面均优于DBoW。具体而言,NetVLAD在保持实时查询速度的同时,显著提高了精确率和召回率,证明了其作为SLAM中LCD模块的有效性。
🎯 应用场景
该研究成果可应用于各种需要实时SLAM的场景,例如:机器人导航、自动驾驶、增强现实等。通过提高回环检测的准确性和实时性,可以显著提升SLAM系统的定位精度和地图构建质量,从而为相关应用提供更可靠的基础。
📄 摘要(原文)
Loop closure detection (LCD) is a core component of simultaneous localization and mapping (SLAM): it identifies revisited places and enables pose-graph constraints that correct accumulated drift. Classic bag-of-words approaches such as DBoW are efficient but often degrade under appearance change and perceptual aliasing. In parallel, deep learning-based visual place recognition (VPR) descriptors (e.g., NetVLAD and Transformer-based models) offer stronger robustness, but their computational cost is often viewed as a barrier to real-time SLAM. In this paper, we empirically evaluate NetVLAD as an LCD module and compare it against DBoW on the KITTI dataset. We introduce a Fine-Grained Top-K precision-recall curve that better reflects LCD settings where a query may have zero or multiple valid matches. With Faiss-accelerated nearestneighbor search, NetVLAD achieves real-time query speed while improving accuracy and robustness over DBoW, making it a practical drop-in alternative for LCD in SLAM.