Research on World Models Is Not Merely Injecting World Knowledge into Specific Tasks
作者: Bohan Zeng, Kaixin Zhu, Daili Hua, Bozhou Li, Chengzhuo Tong, Yuran Wang, Xinyi Huang, Yifan Dai, Zixiang Zhang, Yifan Yang, Zhou Liu, Hao Liang, Xiaochen Ma, Ruichuan An, Tianyi Bai, Hongcheng Gao, Junbo Niu, Yang Shi, Xinlong Chen, Yue Ding, Minglei Shi, Kai Zeng, Yiwen Tang, Yuanxing Zhang, Pengfei Wan, Xintao Wang, Wentao Zhang
分类: cs.CV
发布日期: 2026-02-02
备注: 13 pages, 4 figures
💡 一句话要点
提出世界模型的统一设计规范,克服现有方法在任务上的碎片化。
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 世界模型 人工智能 统一框架 物理动力学 符号推理
📋 核心要点
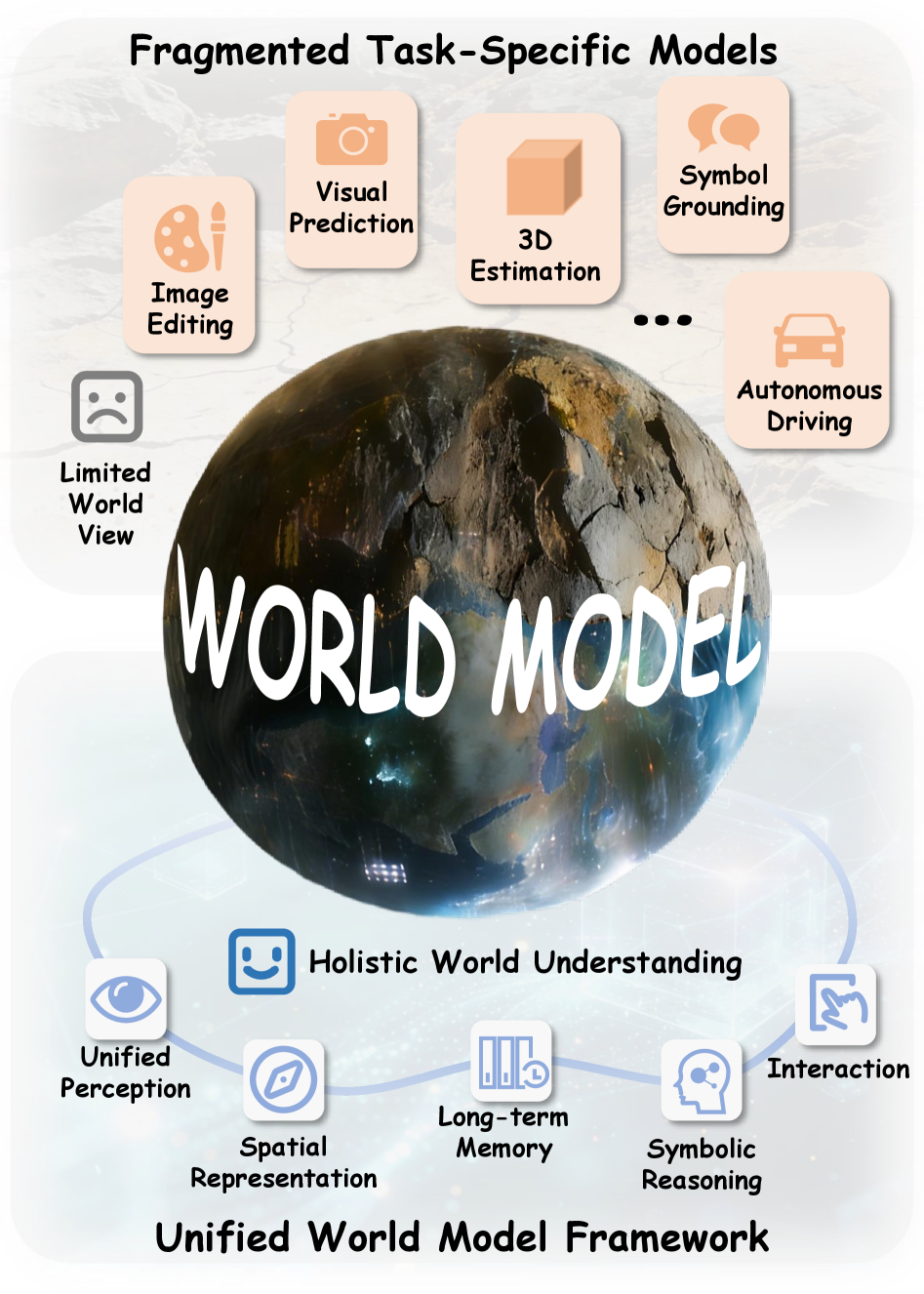
- 现有世界模型研究主要集中于特定任务,缺乏统一的框架和整体的世界理解能力。
- 论文提出世界模型的统一设计规范,强调交互、感知、符号推理和空间表示的整合。
- 该工作旨在为未来世界模型的研究提供结构化的视角,促进更通用和稳健的模型发展。
📝 摘要(中文)
世界模型已成为人工智能研究的关键前沿,旨在通过注入物理动力学和世界知识来增强大型模型。其核心目标是使智能体能够理解、预测复杂环境并与之交互。然而,当前的研究领域仍然分散,各种方法主要集中于将世界知识注入到孤立的任务中,例如视觉预测、3D估计或符号 grounding,而不是建立统一的定义或框架。虽然这些特定于任务的集成可以提高性能,但它们通常缺乏整体世界理解所需的系统连贯性。在本文中,我们分析了这种碎片化方法的局限性,并提出了世界模型的统一设计规范。我们认为,一个强大的世界模型不应是各种能力的松散集合,而应是一个完整地整合交互、感知、符号推理和空间表示的规范框架。这项工作旨在提供一个结构化的视角,以指导未来的研究朝着更通用、更稳健和更具原则性的世界模型发展。
🔬 方法详解
问题定义:现有世界模型研究的痛点在于,它们往往是针对特定任务的,例如视觉预测、3D估计或符号 grounding。这些方法虽然在各自的任务上取得了进展,但缺乏一个统一的框架来整合这些能力,从而无法实现对世界的整体理解。这种碎片化的方法限制了世界模型的泛化能力和鲁棒性。
核心思路:论文的核心思路是,世界模型不应该是一个个孤立能力的集合,而应该是一个规范的框架,将交互、感知、符号推理和空间表示整合在一起。通过这种整合,世界模型可以更好地理解环境,预测未来的状态,并与环境进行有效的交互。
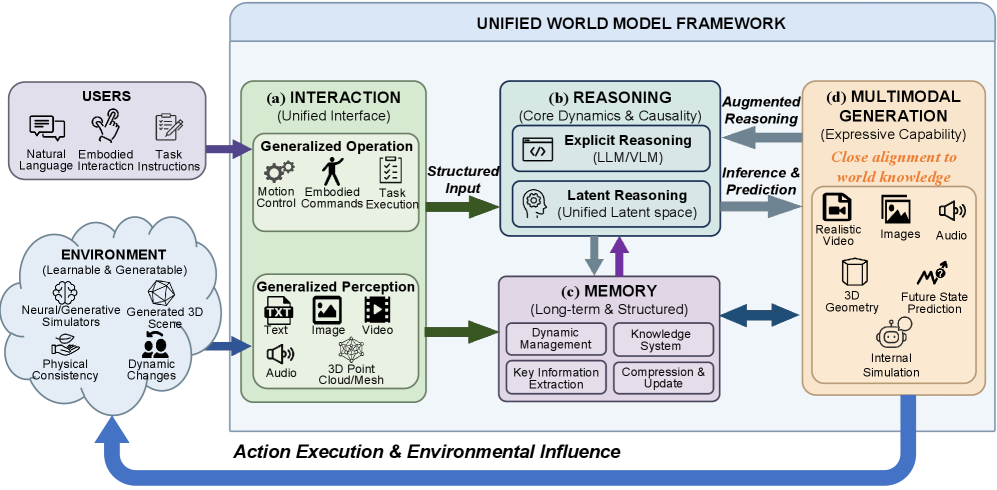
技术框架:论文提出了世界模型的统一设计规范,但并未提供具体的架构或流程图。根据论文描述,一个理想的世界模型应该包含以下几个关键模块:1) 交互模块,负责与环境进行交互并收集数据;2) 感知模块,负责从原始数据中提取有用的信息;3) 符号推理模块,负责进行抽象的推理和决策;4) 空间表示模块,负责对环境进行建模和表示。这些模块需要紧密协作,才能实现对世界的全面理解。
关键创新:论文最重要的创新点在于提出了世界模型的统一设计规范,强调了整合交互、感知、符号推理和空间表示的重要性。与现有方法相比,该规范更加注重整体性和系统性,旨在克服现有方法在任务上的碎片化问题。
关键设计:论文并未提供具体的参数设置、损失函数或网络结构等技术细节。然而,根据论文的描述,关键的设计考虑包括:如何有效地整合不同模态的信息,如何进行抽象的符号推理,以及如何对环境进行准确的建模和表示。这些问题都需要进一步的研究和探索。
🖼️ 关键图片

📊 实验亮点
该论文主要贡献在于理论框架的提出,并未提供具体的实验结果。其亮点在于对现有世界模型研究的局限性进行了深刻的分析,并提出了具有指导意义的统一设计规范,为未来的研究方向提供了新的思路。
🎯 应用场景
该研究成果可应用于机器人导航、自动驾驶、游戏AI等领域。通过构建更通用和稳健的世界模型,智能体可以更好地理解和适应复杂环境,从而实现更智能的决策和行为。未来,该研究有望推动人工智能在现实世界中的广泛应用。
📄 摘要(原文)
World models have emerged as a critical frontier in AI research, aiming to enhance large models by infusing them with physical dynamics and world knowledge. The core objective is to enable agents to understand, predict, and interact with complex environments. However, current research landscape remains fragmented, with approaches predominantly focused on injecting world knowledge into isolated tasks, such as visual prediction, 3D estimation, or symbol grounding, rather than establishing a unified definition or framework. While these task-specific integrations yield performance gains, they often lack the systematic coherence required for holistic world understanding. In this paper, we analyze the limitations of such fragmented approaches and propose a unified design specification for world models. We suggest that a robust world model should not be a loose collection of capabilities but a normative framework that integrally incorporates interaction, perception, symbolic reasoning, and spatial representation. This work aims to provide a structured perspective to guide future research toward more general, robust, and principled models of the world.