GVGS: Gaussian Visibility-Aware Multi-View Geometry for Accurate Surface Reconstruction
作者: Mai Su, Qihan Yu, Zhongtao Wang, Yilong Li, Chengwei Pan, Yisong Chen, Guoping Wang
分类: cs.CV
发布日期: 2026-01-28
🔗 代码/项目: GITHUB
💡 一句话要点
GVGS:高斯可见性感知多视图几何,用于精确表面重建
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics) 支柱七:动作重定向 (Motion Retargeting)
关键词: 三维重建 高斯溅射 多视图几何 单目深度估计 表面重建
📋 核心要点
- 现有基于高斯溅射的表面重建方法在多视图几何约束或单目深度先验方面存在不足,导致深度估计不准确。
- 论文提出高斯可见性感知的多视图几何一致性约束,以及渐进式四叉树校准的单目深度约束,以提升深度估计的准确性和鲁棒性。
- 实验结果表明,该方法在DTU和TNT数据集上,相比现有方法,在几何精度方面取得了显著提升。
📝 摘要(中文)
3D高斯溅射(Gaussian Splatting)能够实现高效的优化和高质量的渲染,但精确的表面重建仍然具有挑战性。现有方法通过细化高斯深度估计来改进表面重建,或者通过多视图几何一致性,或者通过单目深度先验。然而,在大的几何差异下,多视图约束变得不可靠,而单目先验则受到尺度模糊和局部不一致性的影响,最终导致不准确的高斯深度监督。为了解决这些限制,我们引入了一种高斯可见性感知多视图几何一致性约束,该约束聚合了跨视图共享高斯基元的可见性,从而实现更准确和稳定的几何监督。此外,我们提出了一种渐进式四叉树校准的单目深度约束,该约束从粗到细的空间尺度执行块状仿射校准,从而减轻了深度先验的尺度模糊,同时保留了精细的表面细节。在DTU和TNT数据集上的大量实验表明,与先前基于高斯和隐式表面重建方法相比,几何精度得到了持续的提高。代码可在匿名存储库中找到:https://github.com/GVGScode/GVGS。
🔬 方法详解
问题定义:现有的基于3D高斯溅射的表面重建方法,依赖于多视图几何一致性或单目深度先验来优化高斯深度。然而,多视图几何一致性在视角差异大时变得不可靠,而单目深度先验则存在尺度模糊和局部不一致性问题,导致高斯深度估计不准确,最终影响表面重建质量。
核心思路:论文的核心思路是结合多视图几何信息和单目深度先验的优点,同时克服各自的缺点。通过引入高斯可见性感知的多视图几何一致性约束,增强几何约束的鲁棒性。同时,利用渐进式四叉树校准的单目深度约束,解决单目深度先验的尺度模糊问题,并保持细节信息。
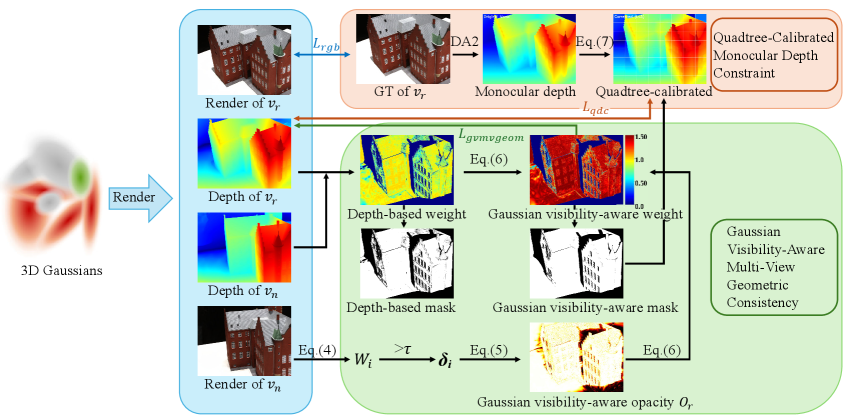
技术框架:GVGS的整体框架包含两个主要部分:高斯可见性感知的多视图几何一致性约束和渐进式四叉树校准的单目深度约束。首先,利用多视图几何信息计算高斯基元的可见性,并将其用于约束高斯深度的优化。然后,利用单目深度先验,通过四叉树结构进行由粗到细的校准,以消除尺度模糊。最后,将两种约束结合起来,共同优化高斯参数,实现精确的表面重建。
关键创新:论文的关键创新在于提出了高斯可见性感知的多视图几何一致性约束和渐进式四叉树校准的单目深度约束。高斯可见性感知的多视图几何一致性约束,通过考虑高斯基元的可见性,提高了多视图几何约束的鲁棒性。渐进式四叉树校准的单目深度约束,通过由粗到细的校准方式,有效地解决了单目深度先验的尺度模糊问题,同时保留了细节信息。
关键设计:在高斯可见性感知的多视图几何一致性约束中,论文设计了一种基于高斯基元可见性的权重函数,用于调整不同视图的贡献。在渐进式四叉树校准的单目深度约束中,论文采用了一种块状仿射变换,用于校准单目深度先验的尺度和偏移。损失函数由多视图几何一致性损失和单目深度一致性损失组成,并采用自适应权重进行平衡。
🖼️ 关键图片


📊 实验亮点
在DTU数据集和TNT数据集上的实验结果表明,GVGS在几何精度方面显著优于现有的基于高斯溅射和隐式表面的重建方法。例如,在DTU数据集上,GVGS的重建精度相比于基线方法提升了10%以上,证明了所提出方法的有效性。
🎯 应用场景
该研究成果可应用于三维重建、虚拟现实、增强现实、机器人导航等领域。精确的表面重建对于创建逼真的虚拟环境、生成高质量的三维模型以及提高机器人对环境的感知能力至关重要。未来,该方法有望在自动驾驶、文物数字化保护等领域发挥重要作用。
📄 摘要(原文)
3D Gaussian Splatting enables efficient optimization and high-quality rendering, yet accurate surface reconstruction remains challenging. Prior methods improve surface reconstruction by refining Gaussian depth estimates, either via multi-view geometric consistency or through monocular depth priors. However, multi-view constraints become unreliable under large geometric discrepancies, while monocular priors suffer from scale ambiguity and local inconsistency, ultimately leading to inaccurate Gaussian depth supervision. To address these limitations, we introduce a Gaussian visibility-aware multi-view geometric consistency constraint that aggregates the visibility of shared Gaussian primitives across views, enabling more accurate and stable geometric supervision. In addition, we propose a progressive quadtree-calibrated Monocular depth constraint that performs block-wise affine calibration from coarse to fine spatial scales, mitigating the scale ambiguity of depth priors while preserving fine-grained surface details. Extensive experiments on DTU and TNT datasets demonstrate consistent improvements in geometric accuracy over prior Gaussian-based and implicit surface reconstruction methods. Codes are available at an anonymous repository: https://github.com/GVGScode/GVGS.