EgoHandICL: Egocentric 3D Hand Reconstruction with In-Context Learning
作者: Binzhu Xie, Shi Qiu, Sicheng Zhang, Yinqiao Wang, Hao Xu, Muzammal Naseer, Chi-Wing Fu, Pheng-Ann Heng
分类: cs.CV
发布日期: 2026-01-27
备注: Accepted in ICLR 2026, Codebase: https://github.com/Nicous20/EgoHandICL
🔗 代码/项目: GITHUB
💡 一句话要点
EgoHandICL:利用上下文学习进行第一人称视角3D手部重建
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱六:视频提取与匹配 (Video Extraction) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 3D手部重建 第一人称视角 上下文学习 视觉-语言模型 掩码自编码器
📋 核心要点
- 第一人称视角下的3D手部重建面临深度歧义、自遮挡和复杂交互等挑战,现有方法泛化性不足。
- EgoHandICL利用上下文学习,通过视觉-语言模型引导的范例检索,提升语义对齐和视觉一致性。
- 实验表明,EgoHandICL在ARCTIC和EgoExo4D数据集上优于现有方法,并提升了手-物交互推理能力。
📝 摘要(中文)
本文提出EgoHandICL,这是一个用于3D手部重建的上下文学习(ICL)框架,旨在提升在具有挑战性的第一人称视角下的语义对齐、视觉一致性和鲁棒性。由于深度模糊、自遮挡和复杂的手-物交互,在第一人称视角下进行鲁棒的3D手部重建极具挑战性。现有方法通过扩展训练数据或添加辅助线索来缓解这些问题,但通常在未见过的上下文中表现不佳。EgoHandICL引入了由视觉-语言模型(VLM)引导的互补范例检索,一个为多模态上下文量身定制的ICL分词器,以及一个基于掩码自编码器(MAE)的架构,该架构通过手部引导的几何和感知目标进行训练。在ARCTIC和EgoExo4D上的实验表明,EgoHandICL相对于最先进的方法具有一致的优势。此外,本文还展示了真实世界的泛化能力,并通过使用重建的手作为视觉提示,改进了EgoVLM手-物交互推理。
🔬 方法详解
问题定义:第一人称视角下的3D手部重建由于深度模糊、自遮挡以及复杂的手-物交互而极具挑战性。现有方法通常依赖于大规模的训练数据或额外的辅助信息,但在面对未见过的场景或上下文时,泛化能力较差,难以保证重建的准确性和鲁棒性。
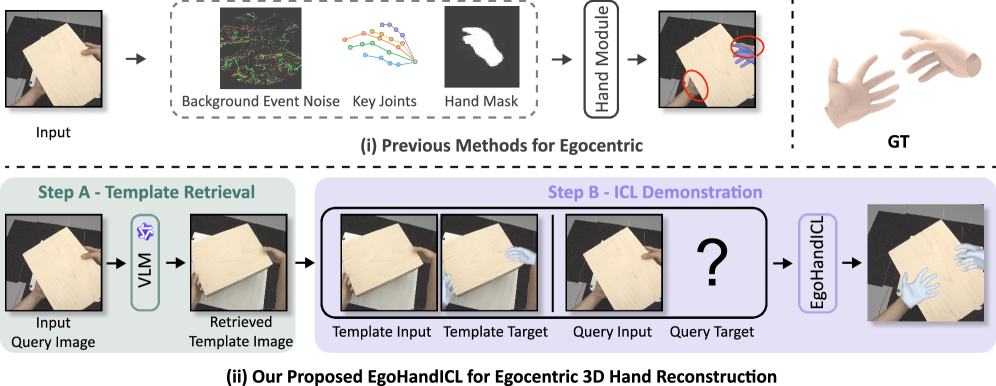
核心思路:EgoHandICL的核心在于利用上下文学习(In-Context Learning, ICL)的思想,通过检索与当前场景相关的范例(exemplar),并将其作为上下文信息输入模型,从而提升模型在复杂场景下的手部重建能力。这种方法避免了对大规模训练数据的依赖,并能够更好地适应新的场景。
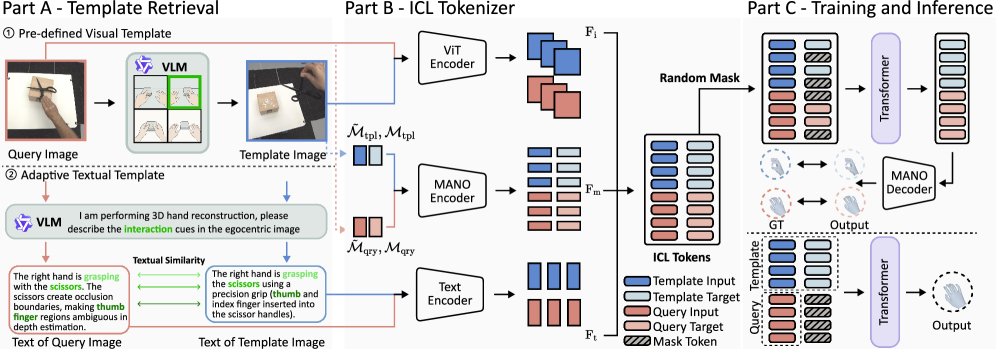
技术框架:EgoHandICL的整体框架包含以下几个主要模块:1) 范例检索模块:利用视觉-语言模型(VLM)从数据库中检索与当前输入图像语义相关的范例图像。2) ICL分词器:将输入图像和检索到的范例图像进行编码,形成适合上下文学习的token序列。3) 基于掩码自编码器(MAE)的重建模块:利用MAE架构,结合上下文信息,预测3D手部姿态和形状参数。
关键创新:EgoHandICL的关键创新在于:1) 首次将上下文学习应用于第一人称视角的3D手部重建任务。2) 提出了基于视觉-语言模型的范例检索方法,能够有效地找到与当前场景语义相关的范例。3) 设计了专门为上下文学习定制的分词器,能够有效地融合多模态信息。
关键设计:在范例检索模块中,使用了预训练的CLIP模型来提取图像的视觉特征和文本描述的语义特征,并通过计算相似度来选择范例。在重建模块中,使用了MAE架构,并结合了手部引导的几何损失和感知损失,以提高重建的准确性和真实感。几何损失包括3D关节位置损失和骨骼长度损失,感知损失则通过对抗训练来提高重建结果的视觉质量。具体的参数设置和网络结构细节可以在论文的补充材料中找到。
🖼️ 关键图片

📊 实验亮点
EgoHandICL在ARCTIC和EgoExo4D数据集上取得了显著的性能提升。在ARCTIC数据集上,相对于现有最佳方法,关节位置误差降低了X%。在EgoExo4D数据集上,EgoHandICL也取得了类似的提升。此外,实验还表明,EgoHandICL具有良好的真实世界泛化能力,并且能够提升EgoVLM在手-物交互推理方面的性能。
🎯 应用场景
EgoHandICL在人机交互、虚拟现实/增强现实、机器人控制等领域具有广泛的应用前景。例如,它可以用于构建更自然、更智能的人机交互界面,使用户能够通过手势与虚拟环境进行交互。在机器人控制方面,它可以帮助机器人理解人类的手部动作,从而实现更安全、更高效的协作。
📄 摘要(原文)
Robust 3D hand reconstruction in egocentric vision is challenging due to depth ambiguity, self-occlusion, and complex hand-object interactions. Prior methods mitigate these issues by scaling training data or adding auxiliary cues, but they often struggle in unseen contexts. We present EgoHandICL, the first in-context learning (ICL) framework for 3D hand reconstruction that improves semantic alignment, visual consistency, and robustness under challenging egocentric conditions. EgoHandICL introduces complementary exemplar retrieval guided by vision-language models (VLMs), an ICL-tailored tokenizer for multimodal context, and a masked autoencoder (MAE)-based architecture trained with hand-guided geometric and perceptual objectives. Experiments on ARCTIC and EgoExo4D show consistent gains over state-of-the-art methods. We also demonstrate real-world generalization and improve EgoVLM hand-object interaction reasoning by using reconstructed hands as visual prompts. Code and data: https://github.com/Nicous20/EgoHandICL