Low Cost, High Efficiency: LiDAR Place Recognition in Vineyards with Matryoshka Representation Learning
作者: Judith Vilella-Cantos, Mauro Martini, Marcello Chiaberge, Mónica Ballesta, David Valiente
分类: cs.CV, cs.AI, cs.LG, cs.RO
发布日期: 2026-01-26
💡 一句话要点
提出MinkUNeXt-VINE,利用Matryoshka表征学习实现低成本LiDAR在葡萄园中的高效定位
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 位姿识别 LiDAR 农业机器人 Matryoshka表征学习 深度学习 Minkowski Engine 非结构化环境
📋 核心要点
- 农业环境缺乏结构化特征,传统位姿识别方法难以有效应用,对移动机器人的定位构成挑战。
- 论文提出MinkUNeXt-VINE,利用Matryoshka表征学习,通过多损失函数优化,提升低成本LiDAR数据的位姿识别性能。
- 实验结果表明,该方法在葡萄园环境中优于现有技术,并在低成本和低分辨率输入数据上表现出稳健性。
📝 摘要(中文)
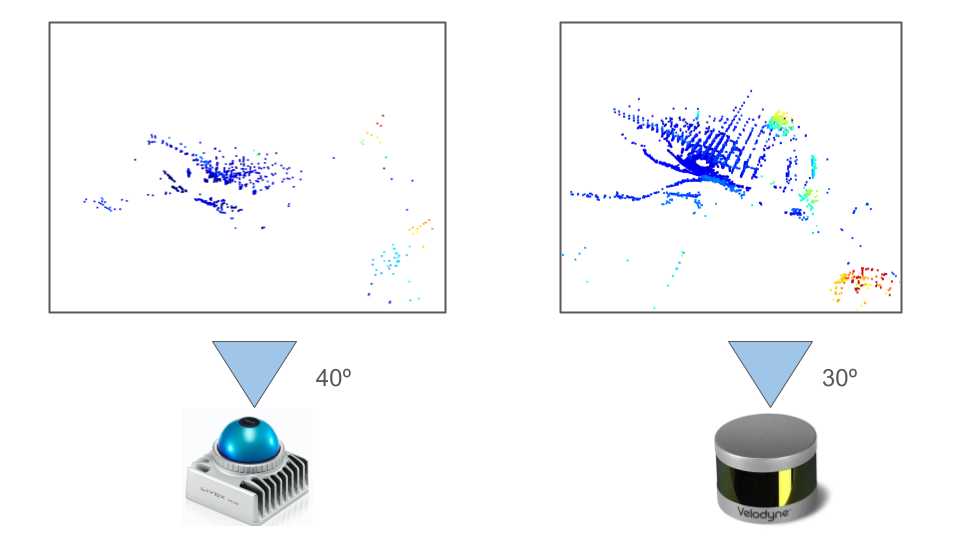
在农业环境中进行定位具有挑战性,因为其非结构化特性和缺乏独特的地标。虽然农业环境已经在对象分类和分割的背景下进行了研究,但对于移动机器人来说,当前最先进的位姿识别任务并非易事。在本研究中,我们提出了一种轻量级的、基于深度学习的方法MinkUNeXt-VINE,由于其预处理和Matryoshka表征学习多损失方法,该方法超越了葡萄园环境中的最先进方法。我们的方法优先考虑以低成本、稀疏的LiDAR输入和较低维度的输出增强性能,以确保在实时场景中的高效率。此外,我们还对各种评估案例和采用不同LiDAR传感器的两个广泛的长期葡萄园数据集的结果进行了全面的消融研究。结果表明了这种方法产生的权衡输出的效率,以及其在低成本和低分辨率输入数据上的稳健性能。代码已公开提供以供重现。
🔬 方法详解
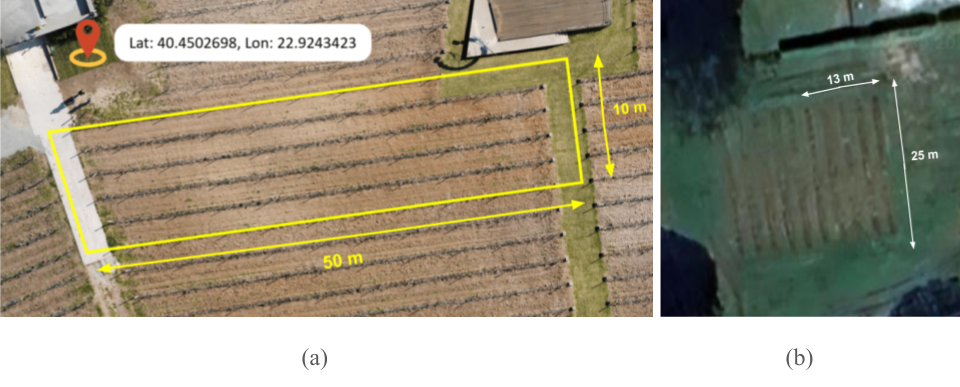
问题定义:论文旨在解决农业环境中,特别是葡萄园中,移动机器人利用低成本LiDAR进行位姿识别的难题。现有方法在非结构化环境中,由于缺乏明显的地标,难以实现精确和高效的定位。现有方法通常需要高分辨率和高成本的传感器,限制了其在资源受限环境中的应用。
核心思路:论文的核心思路是利用Matryoshka表征学习,从低成本、稀疏的LiDAR数据中提取更具判别性的特征。通过多损失函数,迫使网络学习不同分辨率下的特征表示,从而提高对噪声和遮挡的鲁棒性。这种方法旨在在性能和计算成本之间取得平衡,实现实时位姿识别。
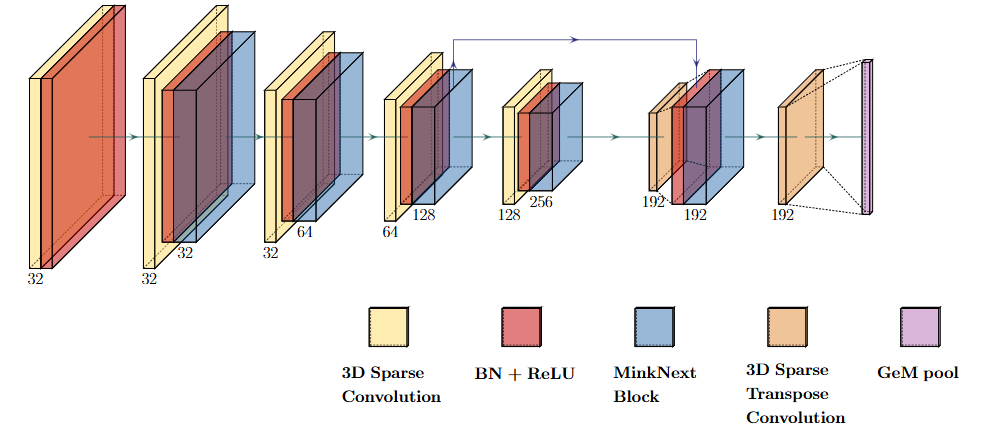
技术框架:MinkUNeXt-VINE的整体框架包括以下几个主要阶段:1) LiDAR数据预处理,对原始点云数据进行滤波和降采样,以减少计算量。2) 特征提取,使用MinkUNeXt网络提取点云的特征表示。3) Matryoshka表征学习,通过多损失函数,在不同分辨率下优化特征表示。4) 位姿识别,将提取的特征与地图数据库中的特征进行匹配,从而确定机器人的位姿。
关键创新:论文的关键创新在于将Matryoshka表征学习应用于LiDAR位姿识别。Matryoshka表征学习允许网络学习不同粒度的特征表示,从而提高对数据变化的鲁棒性。此外,论文还提出了一种轻量级的MinkUNeXt网络结构,降低了计算成本,使其更适合于实时应用。
关键设计:MinkUNeXt-VINE的关键设计包括:1) 使用Minkowski Engine进行稀疏卷积,以提高计算效率。2) 采用多损失函数,包括对比损失和三元组损失,以优化特征表示。3) 设计轻量级的MinkUNeXt网络结构,减少参数数量和计算量。4) 对LiDAR数据进行预处理,包括体素滤波和随机采样,以减少噪声和冗余。
🖼️ 关键图片
📊 实验亮点
实验结果表明,MinkUNeXt-VINE在葡萄园环境中优于现有的位姿识别方法。在两个不同的葡萄园数据集上,该方法在低成本LiDAR数据上实现了更高的定位精度和更快的运行速度。消融研究验证了Matryoshka表征学习和多损失函数的有效性,证明了该方法在性能和效率之间的良好权衡。
🎯 应用场景
该研究成果可应用于农业机器人、自动驾驶车辆和无人机等领域,尤其适用于需要在非结构化环境中进行自主导航和定位的场景。通过降低对传感器成本和计算资源的需求,该方法有望促进农业自动化和智能化,提高农业生产效率和可持续性。
📄 摘要(原文)
Localization in agricultural environments is challenging due to their unstructured nature and lack of distinctive landmarks. Although agricultural settings have been studied in the context of object classification and segmentation, the place recognition task for mobile robots is not trivial in the current state of the art. In this study, we propose MinkUNeXt-VINE, a lightweight, deep-learning-based method that surpasses state-of-the-art methods in vineyard environments thanks to its pre-processing and Matryoshka Representation Learning multi-loss approach. Our method prioritizes enhanced performance with low-cost, sparse LiDAR inputs and lower-dimensionality outputs to ensure high efficiency in real-time scenarios. Additionally, we present a comprehensive ablation study of the results on various evaluation cases and two extensive long-term vineyard datasets employing different LiDAR sensors. The results demonstrate the efficiency of the trade-off output produced by this approach, as well as its robust performance on low-cost and low-resolution input data. The code is publicly available for reproduction.