GaussianTrimmer: Online Trimming Boundaries for 3DGS Segmentation
作者: Liwei Liao, Ronggang Wang
分类: cs.CV, eess.IV
发布日期: 2026-01-19
💡 一句话要点
GaussianTrimmer:提出在线边界修剪方法,提升3D高斯分割的边界质量。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 3D高斯 场景分割 边界修剪 虚拟相机 后处理
📋 核心要点
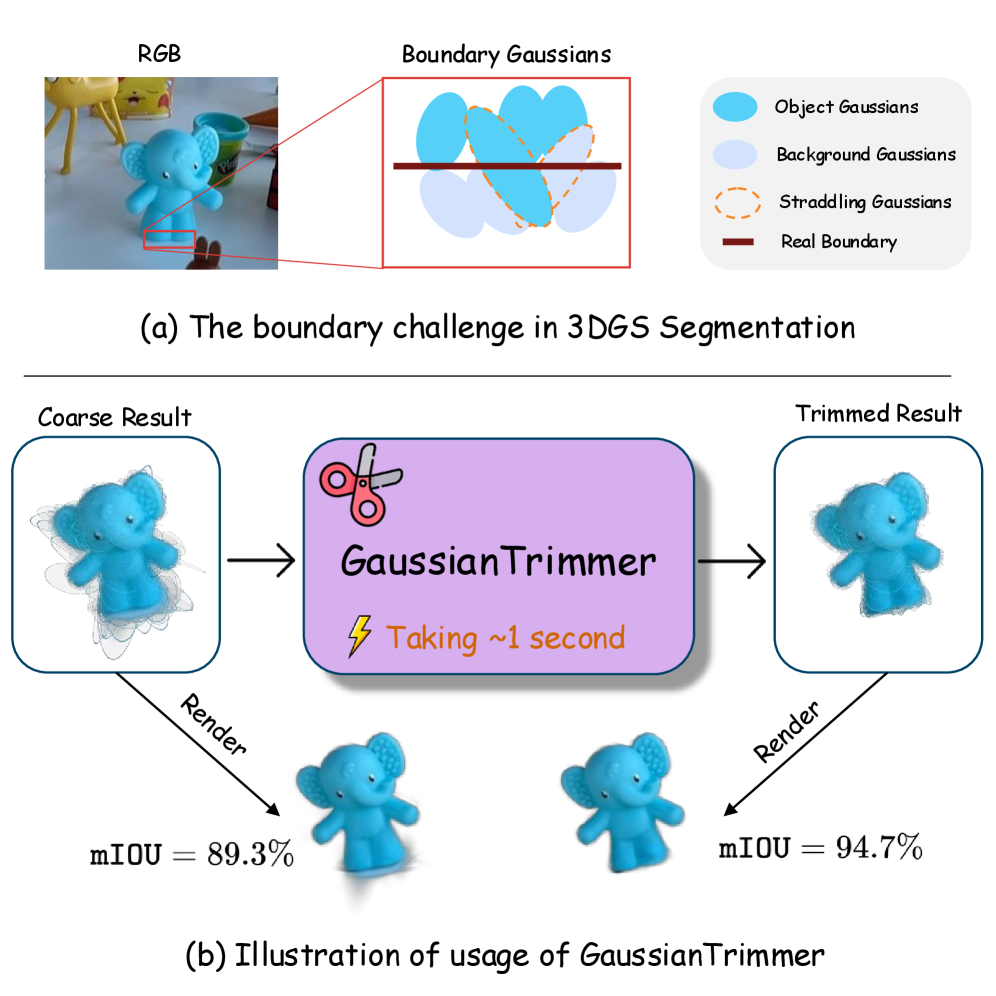
- 现有3D高斯分割方法受限于高斯图元的尺度变化,大尺寸高斯易跨越前景背景,导致分割边界锯齿化。
- GaussianTrimmer通过生成虚拟相机,并利用2D分割结果在图元级别在线修剪3D高斯,优化分割边界。
- 实验结果表明,GaussianTrimmer作为即插即用模块,能有效提升现有3D高斯分割方法的分割质量。
📝 摘要(中文)
随着3D高斯在3D场景表示中的广泛应用,基于3D高斯的3D场景分割方法也逐渐涌现。然而,现有的3D高斯分割方法基本上都是基于高斯图元进行分割。由于3D高斯尺度变化范围较大,大尺寸的高斯常常跨越前景和背景,导致分割对象的边界出现锯齿状。为此,我们提出了一种在线边界修剪方法GaussianTrimmer,这是一种高效且即插即用的后处理方法,能够为现有的3D高斯分割方法修剪粗糙的边界。我们的方法包括两个核心步骤:1. 生成均匀且良好覆盖的虚拟相机;2. 基于虚拟相机上的2D分割结果,在图元级别修剪高斯。大量的定量和定性实验表明,作为一种即插即用的方法,我们的方法可以提高现有3D高斯分割方法的分割质量。
🔬 方法详解
问题定义:现有的基于3D高斯的场景分割方法,由于3D高斯基元本身尺度差异较大,容易出现大尺寸高斯跨越前景和背景的情况。这导致分割结果的边界不清晰,呈现锯齿状,影响分割质量。因此,需要一种方法来优化这些粗糙的边界。
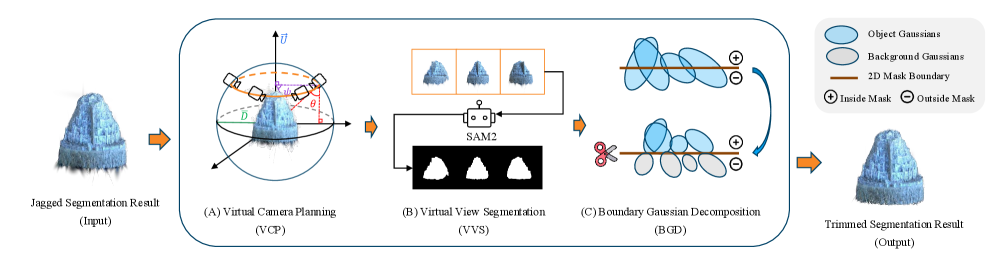
核心思路:GaussianTrimmer的核心思路是利用虚拟相机从不同视角观察3D高斯场景,并基于这些视角下的2D分割结果来指导3D高斯基元的修剪。通过在图元级别进行修剪,可以更精细地调整分割边界,从而提高分割质量。这种方法类似于人工精修分割结果。
技术框架:GaussianTrimmer主要包含两个阶段:1. 虚拟相机生成阶段:在该阶段,生成一系列均匀分布且良好覆盖场景的虚拟相机。这些虚拟相机用于从不同视角渲染场景。2. 高斯修剪阶段:在该阶段,首先利用现有的3D高斯分割方法在每个虚拟相机视角下生成2D分割结果。然后,根据这些2D分割结果,对3D高斯基元进行修剪。具体来说,如果一个高斯基元在多个视角下都被判定为属于背景区域,则将其从前景分割结果中移除。
关键创新:GaussianTrimmer的关键创新在于其在线修剪的策略和即插即用的特性。它不需要重新训练分割模型,而是作为后处理步骤,直接作用于现有的3D高斯分割结果。这种方式降低了使用门槛,方便集成到不同的3D高斯分割流程中。此外,基于虚拟相机的修剪方式能够有效利用多视角信息,提高修剪的准确性。
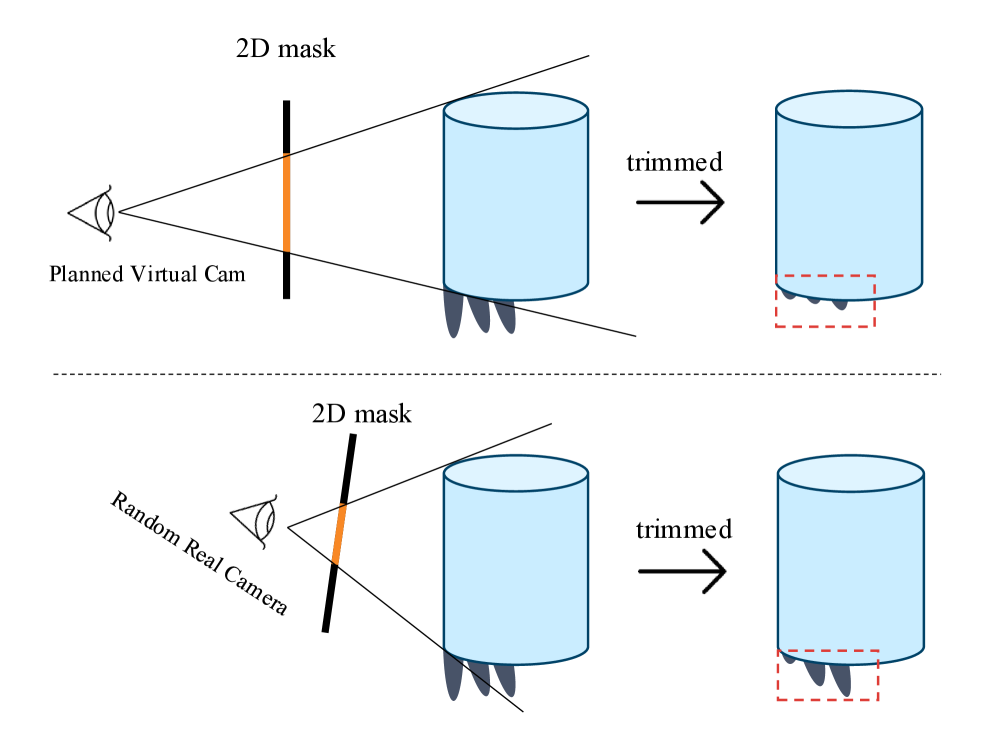
关键设计:虚拟相机的生成策略需要保证对场景的良好覆盖,避免出现视角盲区。高斯修剪的阈值(例如,一个高斯基元需要被多少个虚拟相机判定为背景才能被移除)需要根据具体场景和分割结果进行调整。此外,可以考虑使用不同的2D分割算法来生成虚拟相机视角下的分割结果,以进一步提高修剪的精度。
🖼️ 关键图片
📊 实验亮点
论文提出的GaussianTrimmer方法,作为即插即用的后处理模块,能够有效提升现有3D高斯分割方法的性能。实验结果表明,该方法在多个数据集上均取得了显著的分割质量提升,尤其是在边界区域的分割精度上。具体的性能数据和对比基线信息需要在论文中查找。
🎯 应用场景
GaussianTrimmer可广泛应用于需要精确3D场景分割的领域,如机器人导航、自动驾驶、增强现实和虚拟现实。它可以提升这些应用中对场景理解的准确性,例如,在机器人导航中,更精确的场景分割可以帮助机器人更好地识别障碍物和可行走区域。在AR/VR中,可以用于更真实地合成虚拟物体与真实场景。
📄 摘要(原文)
With the widespread application of 3D Gaussians in 3D scene representation, 3D scene segmentation methods based on 3D Gaussians have also gradually emerged. However, existing 3D Gaussian segmentation methods basically segment on the basis of Gaussian primitives. Due to the large variation range of the scale of 3D Gaussians, large-sized Gaussians that often span the foreground and background lead to jagged boundaries of segmented objects. To this end, we propose an online boundary trimming method, GaussianTrimmer, which is an efficient and plug-and-play post-processing method capable of trimming coarse boundaries for existing 3D Gaussian segmentation methods. Our method consists of two core steps: 1. Generating uniformly and well-covered virtual cameras; 2. Trimming Gaussian at the primitive level based on 2D segmentation results on virtual cameras. Extensive quantitative and qualitative experiments demonstrate that our method can improve the segmentation quality of existing 3D Gaussian segmentation methods as a plug-and-play method.