IDDR-NGP: Incorporating Detectors for Distractor Removal with Instant Neural Radiance Field
作者: Xianliang Huang, Jiajie Gou, Shuhang Chen, Zhizhou Zhong, Jihong Guan, Shuigeng Zhou
分类: cs.CV, cs.AI
发布日期: 2026-01-16
备注: 8 pages, 7 figures, accepted by ACM-MM23
期刊: Proceedings of the 31st ACM International Conference on Multimedia. 2023: 1343-1351
💡 一句话要点
IDDR-NGP:融合检测器的Instant-NGP场景干扰物移除方法
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 神经辐射场 干扰物移除 3D重建 目标检测 多视角学习
📋 核心要点
- 现有方法通常针对特定类型的干扰物,缺乏通用性,难以处理复杂场景中的多种干扰。
- IDDR-NGP结合2D检测器和隐式3D表示,通过LPIPS损失和MVCL损失优化渲染结果,实现端到端的干扰物移除。
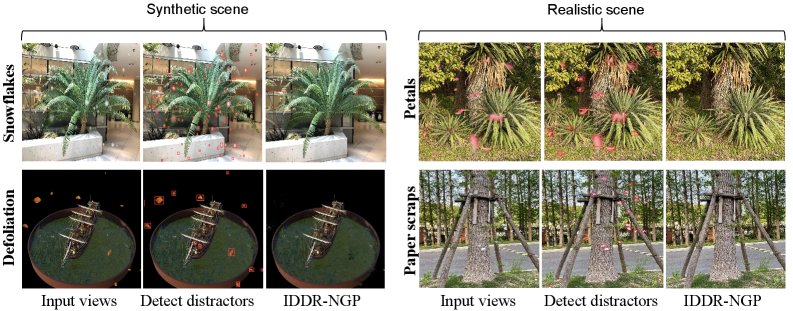
- 在包含合成和真实干扰物的新基准数据集上,IDDR-NGP展现了有效性和鲁棒性,并与SOTA除雪方法相当。
📝 摘要(中文)
本文提出了一种统一的干扰物移除方法IDDR-NGP,它直接作用于Instant-NGP。该方法能够移除3D场景中的多种干扰物,如雪花、五彩纸屑、落叶和花瓣,而现有方法通常只关注特定类型的干扰物。通过将隐式3D表示与2D检测器相结合,证明了从多个受损图像中有效恢复3D场景是可行的。我们设计了学习的感知图像块相似度(LPIPS)损失和多视角补偿损失(MVCL)来共同优化IDDR-NGP的渲染结果,从而聚合来自多视角受损图像的信息。所有这些都可以端到端地训练,以合成高质量的3D场景。为了支持隐式3D表示中干扰物移除的研究,我们构建了一个新的基准数据集,其中包含合成的和真实的干扰物。为了验证IDDR-NGP的有效性和鲁棒性,我们提供了各种干扰物,并在真实和合成场景中添加了相应的注释标签。大量的实验结果证明了IDDR-NGP在移除多种类型干扰物方面的有效性和鲁棒性。此外,我们的方法取得了与现有SOTA除雪方法相当的结果,并且能够准确地移除真实和合成的干扰物。
🔬 方法详解
问题定义:现有方法在3D场景中移除干扰物时,通常只针对特定类型的干扰物(如雪花),缺乏通用性,难以处理复杂场景中多种干扰物共存的情况。此外,如何有效地从受损图像中恢复高质量的3D场景也是一个挑战。
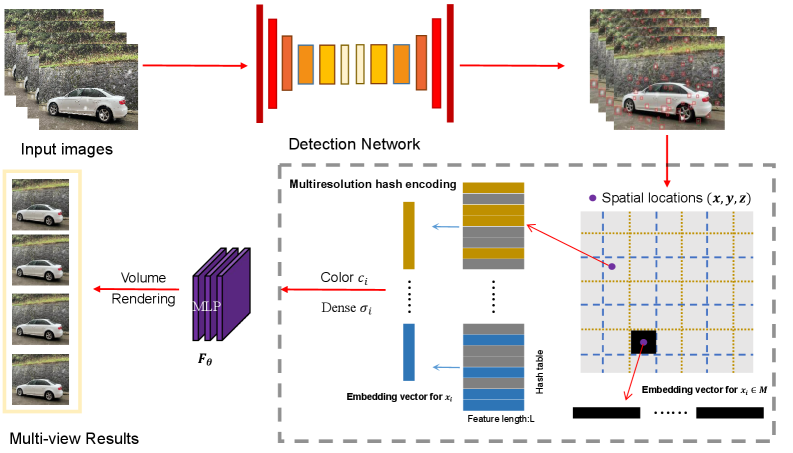
核心思路:IDDR-NGP的核心思路是将2D检测器与Instant-NGP的隐式3D表示相结合,利用2D检测器识别图像中的干扰物,并指导Instant-NGP进行场景重建,从而实现对多种干扰物的移除。通过设计LPIPS损失和MVCL损失,可以有效地聚合来自多视角受损图像的信息,提高重建质量。
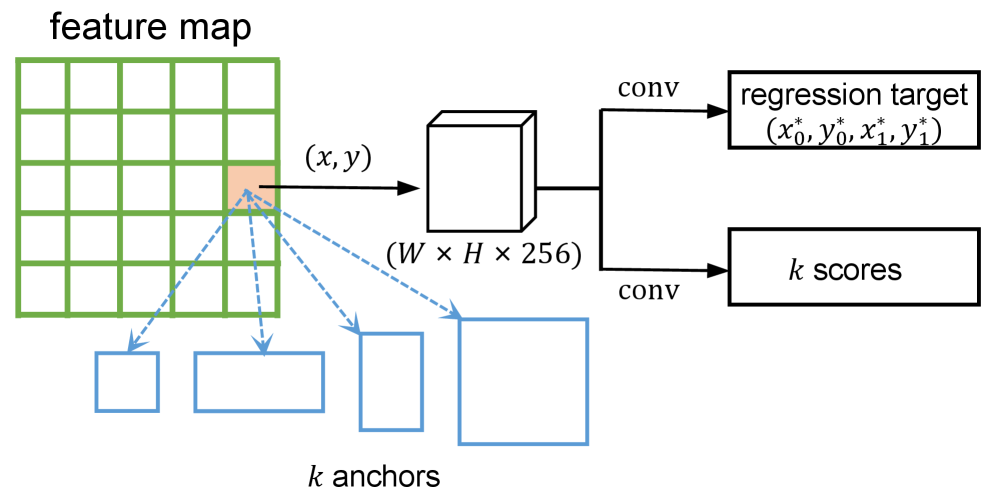
技术框架:IDDR-NGP的整体框架包含以下几个主要模块:1) 2D检测器:用于检测输入图像中的干扰物;2) Instant-NGP:用于进行3D场景的隐式表示和渲染;3) LPIPS损失:用于衡量渲染图像与真实图像之间的感知相似度;4) MVCL损失:用于补偿多视角图像之间的差异,提高重建一致性。整个框架以端到端的方式进行训练。
关键创新:IDDR-NGP的关键创新在于:1) 提出了一种统一的干扰物移除框架,可以处理多种类型的干扰物;2) 将2D检测器与隐式3D表示相结合,充分利用了2D图像信息和3D场景结构;3) 设计了LPIPS损失和MVCL损失,有效地提高了重建质量和一致性。与现有方法相比,IDDR-NGP具有更强的通用性和鲁棒性。
关键设计:LPIPS损失用于衡量渲染图像与真实图像之间的感知相似度,可以有效地提高重建图像的视觉质量。MVCL损失用于补偿多视角图像之间的差异,提高重建的一致性。具体来说,MVCL损失鼓励相邻视角的渲染结果保持一致,从而减少由于干扰物造成的重建误差。2D检测器的选择和训练也至关重要,需要选择能够准确检测各种干扰物的检测器,并使用包含各种干扰物的图像进行训练。
🖼️ 关键图片
📊 实验亮点
实验结果表明,IDDR-NGP在合成和真实场景中均能有效地移除多种类型的干扰物,并且取得了与现有SOTA除雪方法相当的结果。在新的基准数据集上,IDDR-NGP展现了良好的泛化能力和鲁棒性。定量指标和视觉效果均表明,IDDR-NGP能够有效地恢复高质量的3D场景。
🎯 应用场景
IDDR-NGP可应用于自动驾驶、机器人导航、增强现实等领域。例如,在自动驾驶中,可以移除摄像头图像中的雨雪、雾霾等干扰,提高感知系统的准确性和鲁棒性。在机器人导航中,可以移除场景中的杂物和遮挡,提高机器人的定位和路径规划能力。在增强现实中,可以移除用户视线中的干扰物,提供更清晰、更真实的增强体验。
📄 摘要(原文)
This paper presents the first unified distractor removal method, named IDDR-NGP, which directly operates on Instant-NPG. The method is able to remove a wide range of distractors in 3D scenes, such as snowflakes, confetti, defoliation and petals, whereas existing methods usually focus on a specific type of distractors. By incorporating implicit 3D representations with 2D detectors, we demonstrate that it is possible to efficiently restore 3D scenes from multiple corrupted images. We design the learned perceptual image patch similarity~( LPIPS) loss and the multi-view compensation loss (MVCL) to jointly optimize the rendering results of IDDR-NGP, which could aggregate information from multi-view corrupted images. All of them can be trained in an end-to-end manner to synthesize high-quality 3D scenes. To support the research on distractors removal in implicit 3D representations, we build a new benchmark dataset that consists of both synthetic and real-world distractors. To validate the effectiveness and robustness of IDDR-NGP, we provide a wide range of distractors with corresponding annotated labels added to both realistic and synthetic scenes. Extensive experimental results demonstrate the effectiveness and robustness of IDDR-NGP in removing multiple types of distractors. In addition, our approach achieves results comparable with the existing SOTA desnow methods and is capable of accurately removing both realistic and synthetic distractors.