RGS-SLAM: Robust Gaussian Splatting SLAM with One-Shot Dense Initialization
作者: Wei-Tse Cheng, Yen-Jen Chiou, Yuan-Fu Yang
分类: cs.CV, cs.RO
发布日期: 2025-12-28 (更新: 2026-01-15)
备注: 10 pages, 9 figures
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
RGS-SLAM:基于高斯溅射和单次密集初始化的鲁棒SLAM
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: SLAM 高斯溅射 三维重建 DINOv3 密集初始化
📋 核心要点
- 传统GS-SLAM依赖残差驱动的密集化,导致早期映射不稳定和收敛速度慢,尤其是在复杂场景中。
- RGS-SLAM通过DINOv3特征和置信度加权三角化,实现一次性的密集高斯初始化,避免了渐进式添加高斯函数的需要。
- 实验表明,RGS-SLAM在定位精度、重建质量和收敛速度上均优于现有方法,并在实时性方面表现出色。
📝 摘要(中文)
RGS-SLAM是一个鲁棒的高斯溅射SLAM框架,它用一种免训练的对应关系到高斯初始化方法取代了GS-SLAM中基于残差的密集化阶段。RGS-SLAM不是逐步添加高斯函数来弥补残差揭示的缺失几何信息,而是对从DINOv3描述符导出的密集多视图对应关系进行单次三角化,并通过置信度感知的内点分类器进行细化,从而在优化之前生成一个分布良好且结构感知的高斯种子。这种初始化稳定了早期映射并加速了大约20%的收敛速度,从而在纹理丰富和杂乱的场景中产生更高的渲染保真度,同时与现有的GS-SLAM流程完全兼容。在TUM RGB-D和Replica数据集上的评估表明,RGS-SLAM与最先进的高斯和基于点的SLAM系统相比,实现了有竞争力或更优越的定位和重建精度,并保持了高达925 FPS的实时映射性能。
🔬 方法详解
问题定义:现有GS-SLAM方法在初始化阶段依赖于残差驱动的密集化,即通过观察到的残差逐步添加高斯基元。这种方法在早期阶段容易受到噪声和不准确几何信息的影响,导致映射不稳定,收敛速度慢,尤其是在纹理丰富和杂乱的场景中。因此,需要一种更鲁棒和高效的初始化方法来加速SLAM过程并提高重建质量。
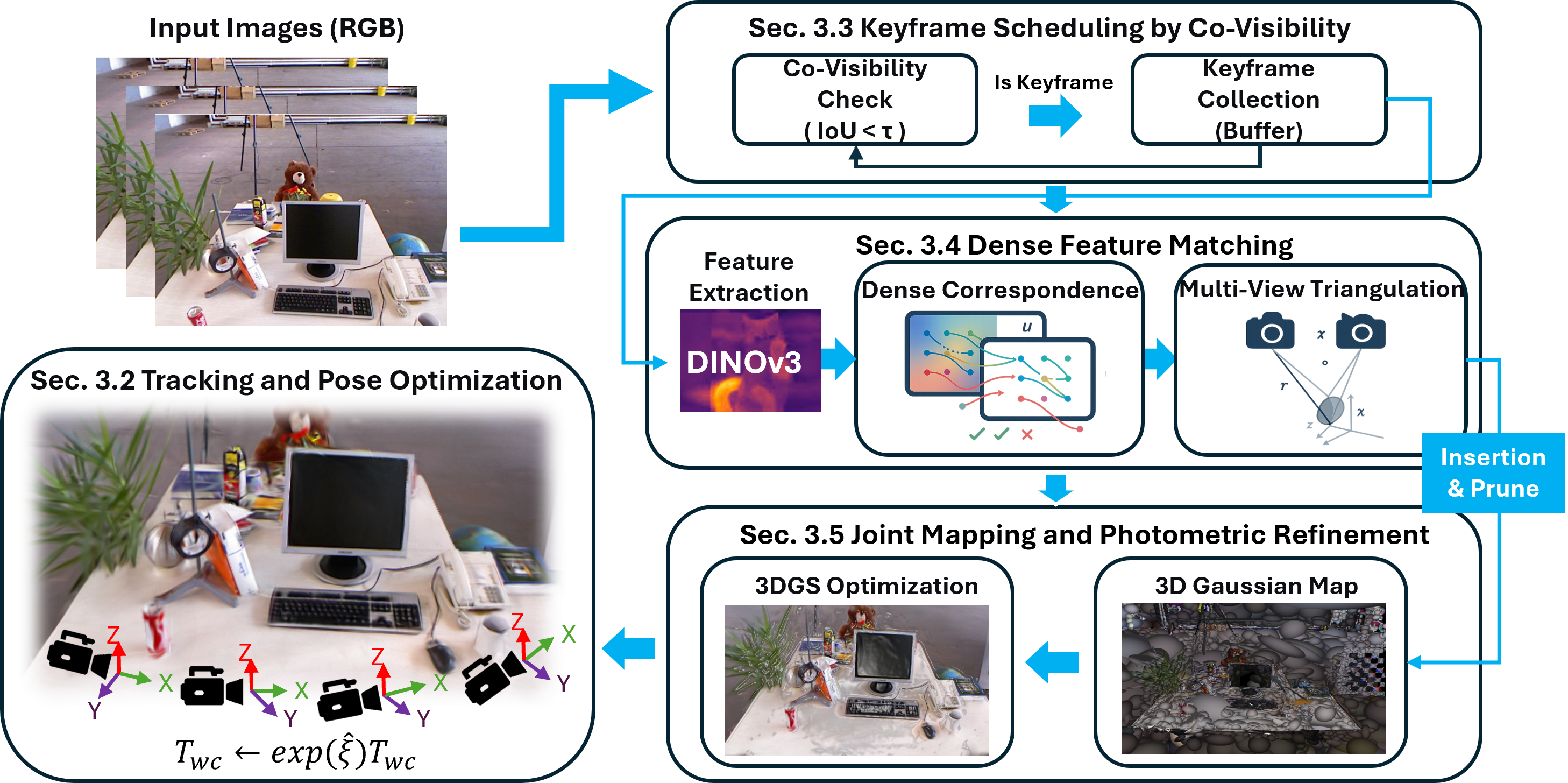
核心思路:RGS-SLAM的核心思路是用一种单次(one-shot)的密集高斯初始化方法取代GS-SLAM的残差驱动密集化。该方法利用预训练的DINOv3特征提取器提取图像特征,并通过多视图几何约束进行三角化,生成初始的高斯基元。这种方法能够一次性地生成一个分布良好且结构感知的高斯种子,从而避免了渐进式添加高斯基元带来的问题。
技术框架:RGS-SLAM的整体框架可以分为以下几个主要阶段:1) 特征提取:使用DINOv3提取多视角的图像特征。2) 对应关系建立:基于DINOv3特征建立多视角的对应关系。3) 三角化:利用多视角的对应关系进行三角化,生成初始的三维点云。4) 高斯初始化:将三维点云转换为高斯基元,并进行初始化。5) 优化:使用SLAM后端对高斯基元进行优化,得到最终的地图。
关键创新:RGS-SLAM的关键创新在于使用单次密集初始化取代了残差驱动的密集化。与现有方法相比,RGS-SLAM能够更快速、更鲁棒地初始化高斯基元,从而加速SLAM过程并提高重建质量。此外,RGS-SLAM还引入了一个置信度感知的内点分类器,用于过滤掉不准确的对应关系,进一步提高了初始化的鲁棒性。
关键设计:RGS-SLAM的关键设计包括:1) 使用DINOv3作为特征提取器,因为它能够提供鲁棒的图像特征。2) 使用置信度感知的内点分类器来过滤掉不准确的对应关系。3) 使用多视图几何约束进行三角化,以生成准确的三维点云。4) 将三维点云转换为高斯基元时,使用合理的参数设置,例如高斯基元的方差和颜色。
🖼️ 关键图片
📊 实验亮点
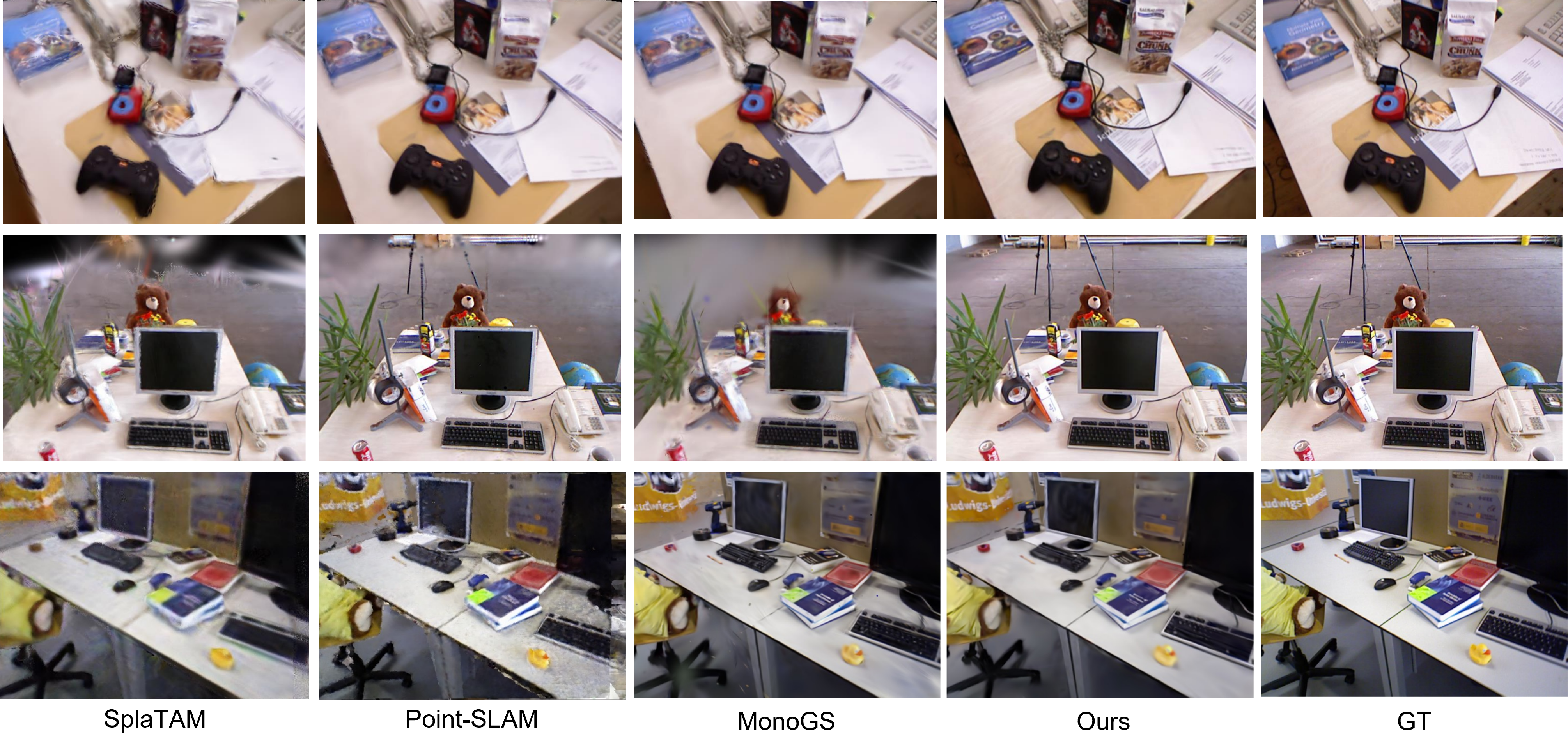
RGS-SLAM在TUM RGB-D和Replica数据集上进行了评估,结果表明,RGS-SLAM在定位精度和重建质量上均优于或与最先进的SLAM系统相当。与GS-SLAM相比,RGS-SLAM能够加速约20%的收敛速度,并在纹理丰富和杂乱的场景中产生更高的渲染保真度。此外,RGS-SLAM还实现了高达925 FPS的实时映射性能。
🎯 应用场景
RGS-SLAM具有广泛的应用前景,例如增强现实、虚拟现实、机器人导航、三维重建等。该方法能够快速、鲁棒地构建高质量的三维地图,为这些应用提供可靠的环境感知能力。尤其在纹理复杂、光照变化剧烈的场景下,RGS-SLAM的优势更加明显。未来,RGS-SLAM有望成为下一代SLAM系统的核心组成部分。
📄 摘要(原文)
We introduce RGS-SLAM, a robust Gaussian-splatting SLAM framework that replaces the residual-driven densification stage of GS-SLAM with a training-free correspondence-to-Gaussian initialization. Instead of progressively adding Gaussians as residuals reveal missing geometry, RGS-SLAM performs a one-shot triangulation of dense multi-view correspondences derived from DINOv3 descriptors refined through a confidence-aware inlier classifier, generating a well-distributed and structure-aware Gaussian seed prior to optimization. This initialization stabilizes early mapping and accelerates convergence by roughly 20\%, yielding higher rendering fidelity in texture-rich and cluttered scenes while remaining fully compatible with existing GS-SLAM pipelines. Evaluated on the TUM RGB-D and Replica datasets, RGS-SLAM achieves competitive or superior localization and reconstruction accuracy compared with state-of-the-art Gaussian and point-based SLAM systems, sustaining real-time mapping performance at up to 925 FPS. Additional details and resources are available at this URL: https://breeze1124.github.io/rgs-slam-project-page/