GNC-Pose: Geometry-Aware GNC-PnP for Accurate 6D Pose Estimation
作者: Xiujin Liu
分类: cs.CV
发布日期: 2025-12-06
备注: 1 figures, 2 tables, 14pages
💡 一句话要点
GNC-Pose:结合几何感知的GNC-PnP方法,实现精确的6D位姿估计
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics) 支柱六:视频提取与匹配 (Video Extraction)
关键词: 6D位姿估计 GNC优化 几何感知 无学习方法 鲁棒性 单目视觉 PnP算法
📋 核心要点
- 现有6D位姿估计方法在严重离群值存在的情况下,优化过程容易不稳定,导致精度下降。
- GNC-Pose利用GNC原理,结合几何感知的聚类加权机制,为每个点分配基于3D结构一致性的置信度,稳定优化过程。
- 在YCB数据集上,GNC-Pose在无需学习特征、训练数据或类别先验的情况下,实现了与现有方法相当甚至更优的精度。
📝 摘要(中文)
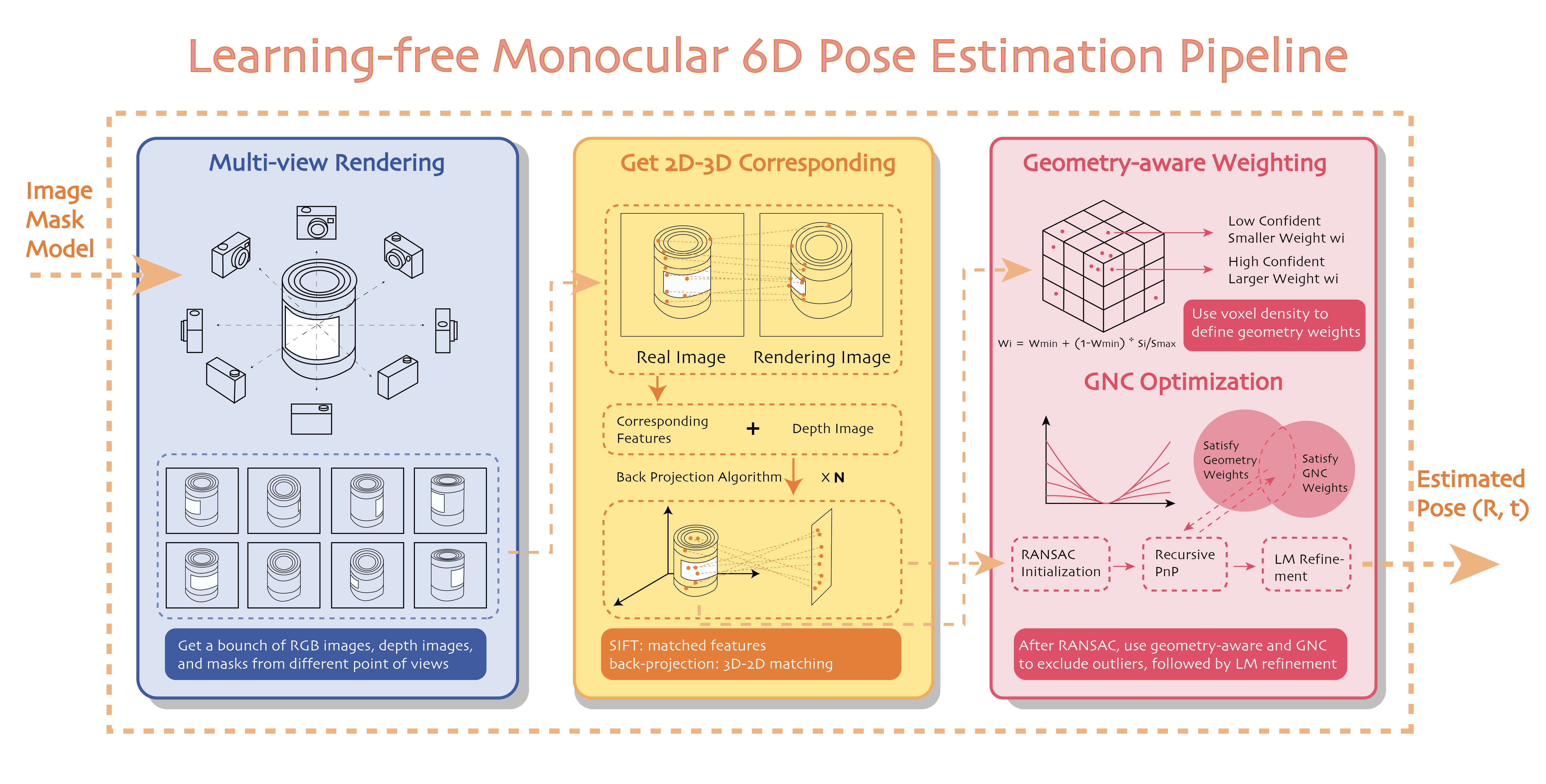
本文提出GNC-Pose,一个完全无学习的单目6D物体位姿估计流程,适用于纹理物体。该流程结合了基于渲染的初始化、几何感知的对应点加权和鲁棒的GNC优化。从通过特征匹配和基于渲染的对齐获得的粗略2D-3D对应关系开始,我们的方法基于Graduated Non-Convexity (GNC) 原理,并引入了一种几何感知的、基于聚类的加权机制,该机制基于模型的3D结构一致性为每个点分配鲁棒的置信度。这种几何先验和加权策略显著稳定了严重离群值污染下的优化。最后的LM细化进一步提高了精度。我们在YCB Object and Model Set上测试了GNC-Pose,尽管不需要学习的特征、训练数据或类别特定的先验,但与基于学习和无学习的方法相比,GNC-Pose实现了具有竞争力的精度,并为无学习的6D位姿估计提供了一个简单、鲁棒和实用的解决方案。
🔬 方法详解
问题定义:论文旨在解决单目视觉下纹理物体的精确6D位姿估计问题。现有方法,尤其是无学习方法,在存在大量离群点时,位姿估计的鲁棒性较差,容易陷入局部最优。这些离群点通常来源于错误的特征匹配或遮挡等因素。
核心思路:论文的核心思路是利用物体的几何结构信息来指导位姿优化过程。通过对2D-3D对应点进行加权,降低离群点的影响,提高位姿估计的鲁棒性。这种加权是基于点的3D结构一致性,即如果一个点与周围点的3D结构一致,则赋予较高的权重。
技术框架:GNC-Pose的整体流程包括三个主要阶段:1) 基于渲染的初始化:通过特征匹配和渲染对齐获得粗略的2D-3D对应关系;2) 几何感知的对应点加权:基于GNC原理,利用聚类方法对对应点进行加权,赋予高结构一致性的点更高的权重;3) 鲁棒GNC优化:使用加权后的对应点进行GNC优化,得到精确的位姿估计,最后使用LM算法进行精细调整。
关键创新:论文的关键创新在于提出了几何感知的对应点加权机制。与传统的基于特征匹配质量的加权方法不同,该方法利用了物体的3D结构信息,能够更有效地识别和抑制离群点。此外,结合GNC优化框架,使得位姿估计过程更加鲁棒。
关键设计:几何感知的加权机制基于聚类算法,将具有相似3D结构的对应点聚为一类,并赋予较高的权重。GNC优化过程使用Huber损失函数,以降低离群点的影响。LM算法用于最后的位姿精细调整。
🖼️ 关键图片
📊 实验亮点
GNC-Pose在YCB数据集上取得了与现有方法具有竞争力的结果,尤其是在不需要任何学习特征或训练数据的情况下。实验结果表明,该方法在严重离群值存在的情况下,仍然能够实现精确的位姿估计,验证了几何感知加权机制的有效性。
🎯 应用场景
GNC-Pose可应用于机器人抓取、增强现实、三维重建等领域。在机器人抓取中,精确的6D位姿估计是实现稳定抓取的关键。在增强现实中,可以用于将虚拟物体精确地叠加到真实场景中。在三维重建中,可以用于提高重建的精度和鲁棒性。
📄 摘要(原文)
We present GNC-Pose, a fully learning-free monocular 6D object pose estimation pipeline for textured objects that combines rendering-based initialization, geometry-aware correspondence weighting, and robust GNC optimization. Starting from coarse 2D-3D correspondences obtained through feature matching and rendering-based alignment, our method builds upon the Graduated Non-Convexity (GNC) principle and introduces a geometry-aware, cluster-based weighting mechanism that assigns robust per point confidence based on the 3D structural consistency of the model. This geometric prior and weighting strategy significantly stabilizes the optimization under severe outlier contamination. A final LM refinement further improve accuracy. We tested GNC-Pose on The YCB Object and Model Set, despite requiring no learned features, training data, or category-specific priors, GNC-Pose achieves competitive accuracy compared with both learning-based and learning-free methods, and offers a simple, robust, and practical solution for learning-free 6D pose estimation.