Curvature-Regularized Variational Autoencoder for 3D Scene Reconstruction from Sparse Depth
作者: Maryam Yousefi, Soodeh Bakhshandeh
分类: cs.CV, cs.LG
发布日期: 2025-12-05
🔗 代码/项目: GITHUB
💡 一句话要点
提出曲率正则化变分自编码器,用于从稀疏深度数据重建3D场景
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 3D场景重建 稀疏深度数据 变分自编码器 曲率正则化 离散拉普拉斯算子
📋 核心要点
- 现有方法在稀疏深度数据下重建3D场景时,几何误差较大,难以满足自动驾驶等应用需求。
- 论文提出利用离散拉普拉斯算子进行曲率正则化,约束重建结果的平滑性,从而提升重建精度。
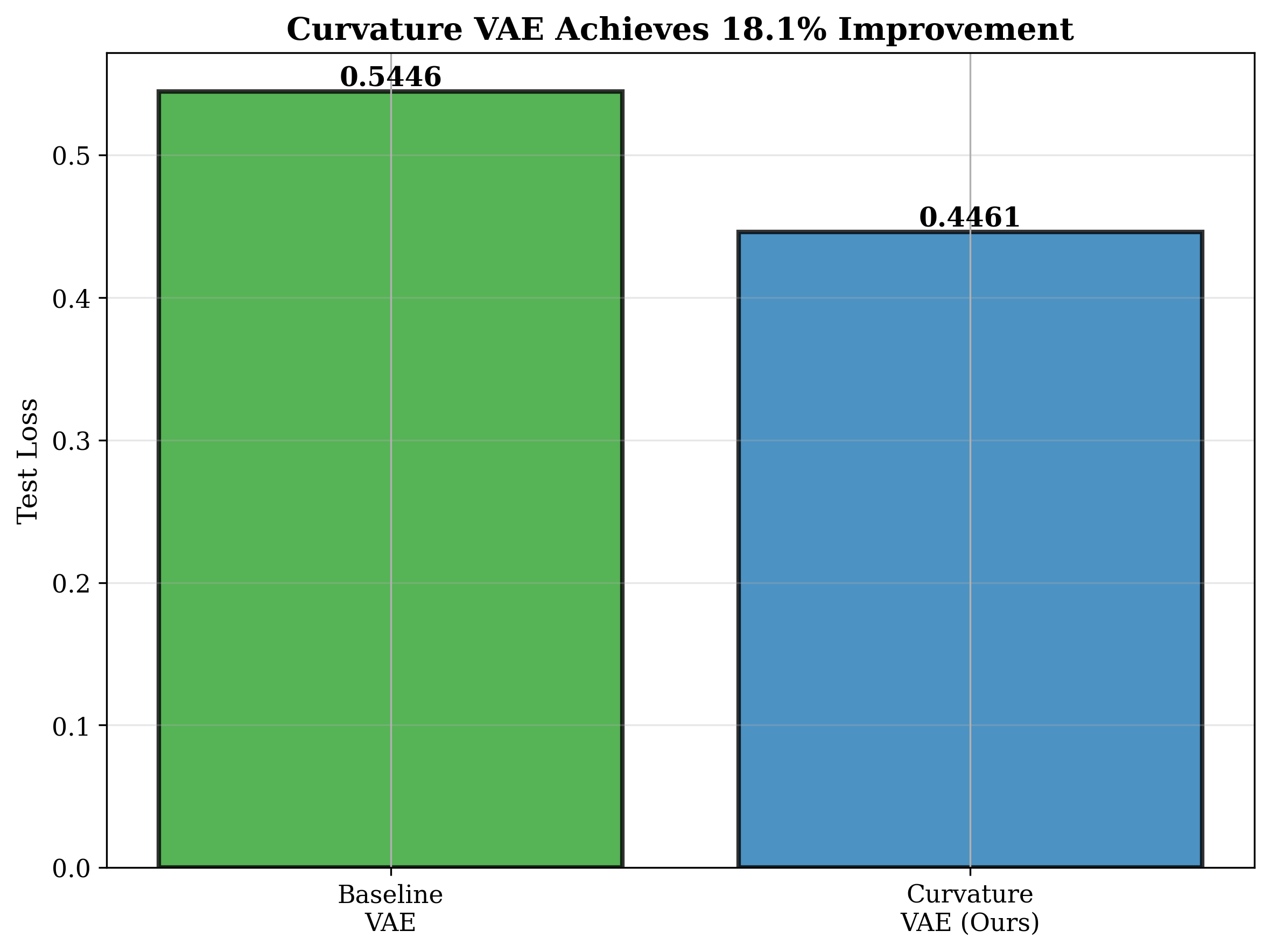
- 实验表明,该方法比标准变分自编码器提高了18.1%的重建精度,且训练开销较低。
📝 摘要(中文)
当深度传感器仅提供所需测量的5%时,重建完整的3D场景变得困难。自动驾驶车辆和机器人无法容忍稀疏重建引入的几何误差。我们提出了一种通过离散拉普拉斯算子进行曲率正则化的方法,实现了比标准变分自编码器高18.1%的重建精度。我们的贡献挑战了几何深度学习中的一个隐含假设:即结合多个几何约束可以提高性能。一个精心设计的正则化项不仅可以匹配,而且超过了复杂的多项式公式的有效性。离散拉普拉斯算子提供稳定的梯度和噪声抑制,仅需15%的训练开销和零推理成本。代码和模型可在https://github.com/Maryousefi/GeoVAE-3D获取。
🔬 方法详解
问题定义:论文旨在解决从极度稀疏的深度数据中精确重建3D场景的问题。现有的方法,特别是基于深度学习的方法,在面对只有少量深度测量值(例如,5%)的情况下,往往会产生较大的几何误差,这对于需要高精度感知的应用(如自动驾驶和机器人)来说是不可接受的。现有的几何深度学习方法通常依赖于组合多个几何约束来提高性能,但这些方法往往计算复杂且效果不佳。
核心思路:论文的核心思路是利用曲率正则化来约束重建的3D场景的平滑性。通过惩罚重建结果中不必要的曲率变化,可以有效地抑制噪声并提高重建精度。论文选择使用离散拉普拉斯算子来近似曲率,因为它具有计算效率高、梯度稳定等优点。这种方法的核心在于,一个精心设计的正则化项可以比多个复杂的几何约束更有效地提高重建质量。
技术框架:该方法基于变分自编码器(VAE)框架。VAE由编码器和解码器组成,编码器将输入的稀疏深度数据映射到潜在空间,解码器则从潜在空间重建3D场景。论文的关键在于在VAE的损失函数中添加了一个曲率正则化项。整体流程如下:1. 输入稀疏深度数据;2. 使用编码器将其编码到潜在空间;3. 从潜在空间采样;4. 使用解码器重建3D场景;5. 计算重建误差和曲率正则化项;6. 使用反向传播更新网络参数。
关键创新:该论文最重要的技术创新点在于提出了使用离散拉普拉斯算子进行曲率正则化,以提高从稀疏深度数据重建3D场景的精度。与现有方法相比,该方法更加简洁高效,并且能够提供稳定的梯度和噪声抑制。此外,论文还挑战了几何深度学习中一个隐含的假设,即结合多个几何约束可以提高性能,证明了一个精心设计的正则化项可以比多个复杂的几何约束更有效。
关键设计:论文的关键设计包括:1. 使用离散拉普拉斯算子来近似曲率,具体实现方式未知(论文未详细说明);2. 将曲率正则化项添加到VAE的损失函数中,损失函数的形式为:L = L_reconstruction + λ * L_curvature,其中L_reconstruction是重建损失,L_curvature是曲率正则化项,λ是正则化系数;3. 正则化系数λ的具体数值未知(论文未详细说明),需要根据具体数据集进行调整;4. 网络结构细节未知(论文未详细说明)。
🖼️ 关键图片
📊 实验亮点
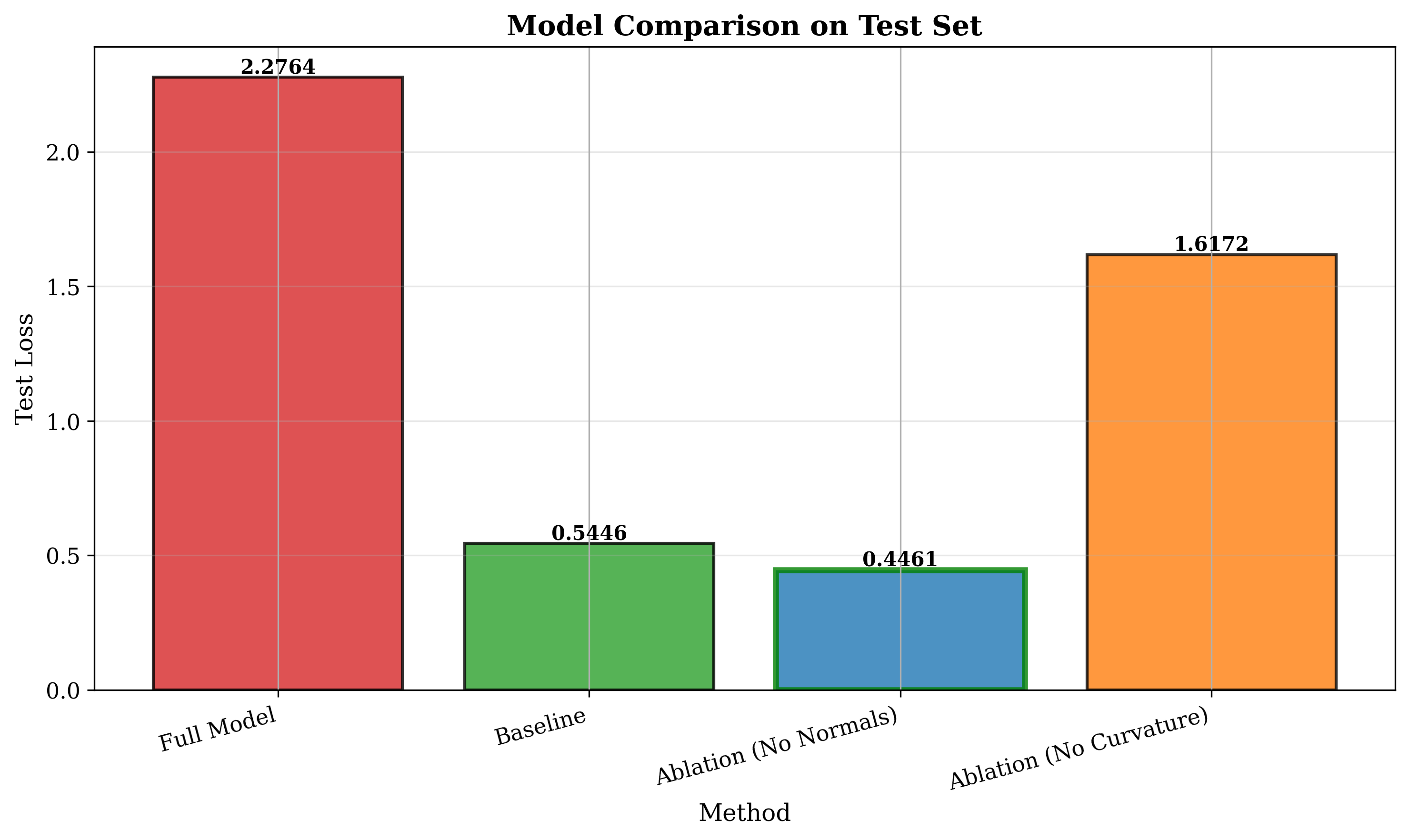
实验结果表明,该方法在稀疏深度数据重建任务上取得了显著的性能提升,相比于标准变分自编码器,重建精度提高了18.1%。此外,该方法仅需15%的训练开销,且推理阶段无需额外计算,具有很高的实用价值。这些结果表明,一个精心设计的曲率正则化项可以有效地提高重建质量,并挑战了几何深度学习中关于多约束的传统认知。
🎯 应用场景
该研究成果可应用于自动驾驶、机器人导航、三维重建等领域。在自动驾驶中,可以利用稀疏的激光雷达数据重建周围环境,提高车辆的感知能力。在机器人导航中,可以帮助机器人在资源有限的情况下构建环境地图。在三维重建中,可以从不完整的扫描数据中恢复出完整的模型。该方法具有计算效率高、精度高等优点,具有广阔的应用前景。
📄 摘要(原文)
When depth sensors provide only 5% of needed measurements, reconstructing complete 3D scenes becomes difficult. Autonomous vehicles and robots cannot tolerate the geometric errors that sparse reconstruction introduces. We propose curvature regularization through a discrete Laplacian operator, achieving 18.1% better reconstruction accuracy than standard variational autoencoders. Our contribution challenges an implicit assumption in geometric deep learning: that combining multiple geometric constraints improves performance. A single well-designed regularization term not only matches but exceeds the effectiveness of complex multi-term formulations. The discrete Laplacian offers stable gradients and noise suppression with just 15% training overhead and zero inference cost. Code and models are available at https://github.com/Maryousefi/GeoVAE-3D.