YOLO and SGBM Integration for Autonomous Tree Branch Detection and Depth Estimation in Radiata Pine Pruning Applications
作者: Yida Lin, Bing Xue, Mengjie Zhang, Sam Schofield, Richard Green
分类: cs.CV
发布日期: 2025-12-05
💡 一句话要点
提出YOLO与SGBM集成的树枝检测与深度估计方法,用于辐射松自主修剪
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: YOLO SGBM 立体视觉 目标检测 深度估计 自主修剪 辐射松 计算机视觉
📋 核心要点
- 人工修剪辐射松树存在安全隐患,现有方法难以兼顾成本与精度,限制了自动化应用。
- 论文提出YOLO与SGBM集成的方案,利用立体视觉信息,无需昂贵LiDAR即可实现精确的树枝定位。
- 实验结果表明,该系统在树枝分割精度和处理速度上表现出色,验证了其在自主修剪中的可行性。
📝 摘要(中文)
本文提出了一种计算机视觉框架,该框架集成了YOLO目标检测和半全局块匹配(SGBM)立体视觉,用于基于无人机的自主修剪作业,目标是解决辐射松人工修剪因工作高度和地形带来的安全风险。该系统仅使用立体相机输入即可实现精确的树枝检测和深度估计,无需昂贵的激光雷达传感器。实验评估表明,YOLO在树枝分割方面优于Mask R-CNN,实现了82.0%的mAPmask50-95。集成系统能够在2米的操作范围内精确定位树枝,每帧处理时间不到一秒。这些结果确立了经济高效的自主修剪系统的可行性,从而提高了商业林业中的工人安全和运营效率。
🔬 方法详解
问题定义:论文旨在解决辐射松树人工修剪过程中的安全风险和效率问题。现有方法,如依赖人工操作或使用昂贵的LiDAR传感器,存在成本高、效率低或安全隐患等问题。因此,需要一种经济高效且安全的自动化修剪方案。
核心思路:论文的核心思路是利用计算机视觉技术,通过YOLO目标检测算法识别树枝,并结合SGBM立体视觉算法进行深度估计,从而实现对树枝的精确定位。这种方法避免了使用昂贵的LiDAR传感器,降低了成本,同时提高了自动化程度。
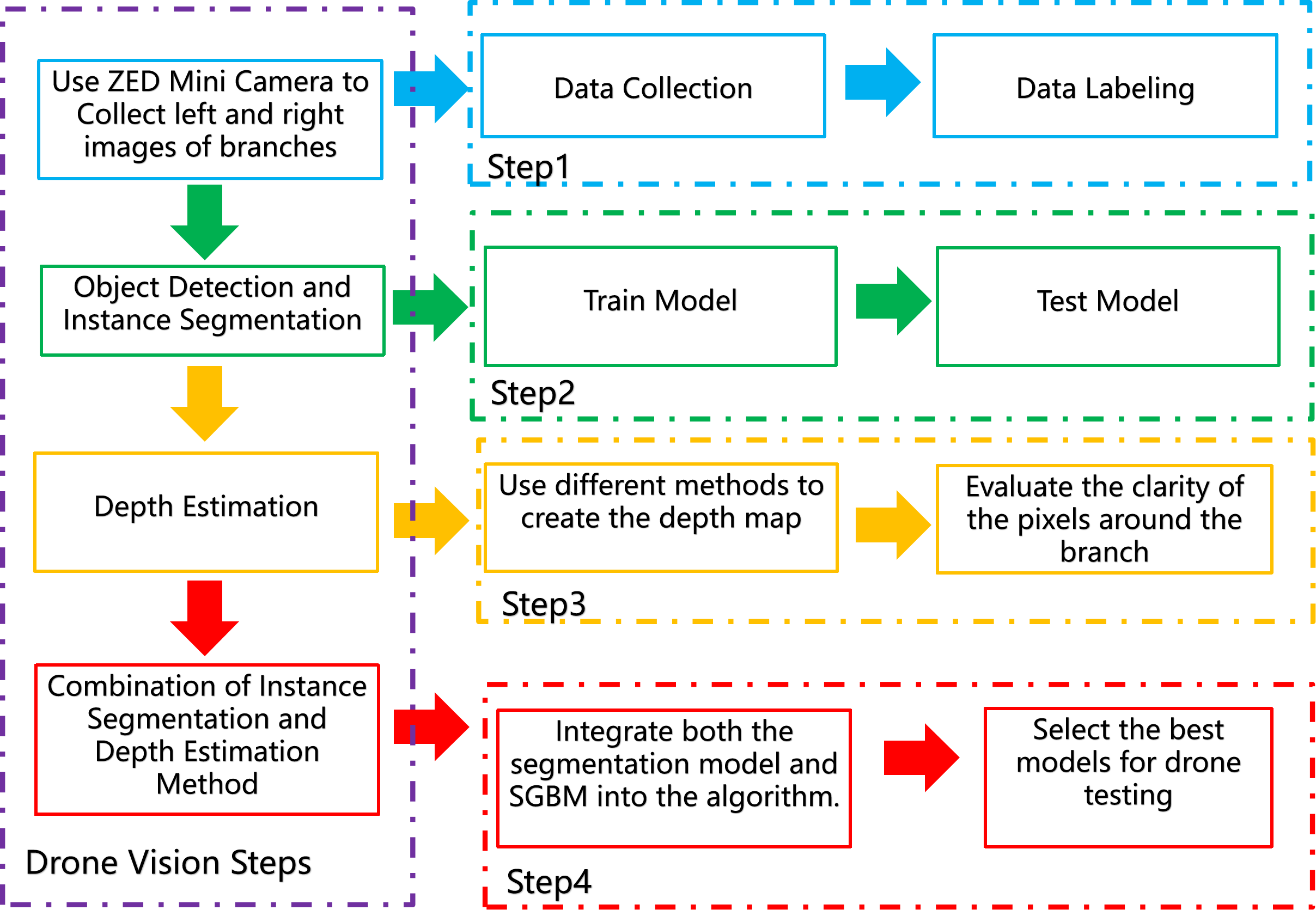
技术框架:整体框架包含以下几个主要模块:1) 立体相机图像采集;2) YOLO目标检测,用于识别图像中的树枝;3) SGBM立体匹配,根据左右图像计算视差图,进而得到深度信息;4) 树枝定位,结合YOLO的检测结果和SGBM的深度估计,确定树枝在三维空间中的位置。整个流程旨在实现快速、准确的树枝检测和深度估计。
关键创新:该论文的关键创新在于将YOLO目标检测与SGBM立体视觉相结合,用于树枝的检测和深度估计。与传统的基于LiDAR的方法相比,该方法成本更低,且能够实现较高的精度。此外,论文还针对树枝的特点,对YOLO模型进行了优化,提高了检测性能。
关键设计:论文中,YOLO模型采用预训练模型进行微调,以适应树枝检测的任务。SGBM算法采用默认参数,并通过实验验证了其在树枝深度估计方面的有效性。此外,论文还对立体相机的标定和校正进行了详细描述,以保证深度估计的准确性。
🖼️ 关键图片


📊 实验亮点
实验结果表明,YOLO在树枝分割方面优于Mask R-CNN,实现了82.0%的mAPmask50-95。集成系统能够在2米的操作范围内精确定位树枝,每帧处理时间不到一秒。这些数据表明,该系统在精度和效率方面均表现出色,为自主修剪系统的实际应用奠定了基础。
🎯 应用场景
该研究成果可应用于商业林业中的自主修剪作业,提高工人安全,降低运营成本,并提升修剪效率。此外,该技术还可扩展到其他农业领域,例如果树修剪、作物管理等,具有广阔的应用前景。未来,可进一步研究如何将该系统与无人机平台集成,实现完全自主的修剪作业。
📄 摘要(原文)
Manual pruning of radiata pine trees poses significant safety risks due to extreme working heights and challenging terrain. This paper presents a computer vision framework that integrates YOLO object detection with Semi-Global Block Matching (SGBM) stereo vision for autonomous drone-based pruning operations. Our system achieves precise branch detection and depth estimation using only stereo camera input, eliminating the need for expensive LiDAR sensors. Experimental evaluation demonstrates YOLO's superior performance over Mask R-CNN, achieving 82.0% mAPmask50-95 for branch segmentation. The integrated system accurately localizes branches within a 2 m operational range, with processing times under one second per frame. These results establish the feasibility of cost-effective autonomous pruning systems that enhance worker safety and operational efficiency in commercial forestry.