Gaussian Entropy Fields: Driving Adaptive Sparsity in 3D Gaussian Optimization
作者: Hong Kuang, Jianchen Liu
分类: cs.CV
发布日期: 2025-12-04
备注: 28 pages,11 figures
💡 一句话要点
提出高斯熵场以驱动3D高斯优化中的自适应稀疏性
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 3D高斯点云 熵最小化 自适应正则化 几何保留 表面重建
📋 核心要点
- 现有的3D高斯点云方法在重建表面时,常常面临冗余成分的干扰,导致几何精度不足。
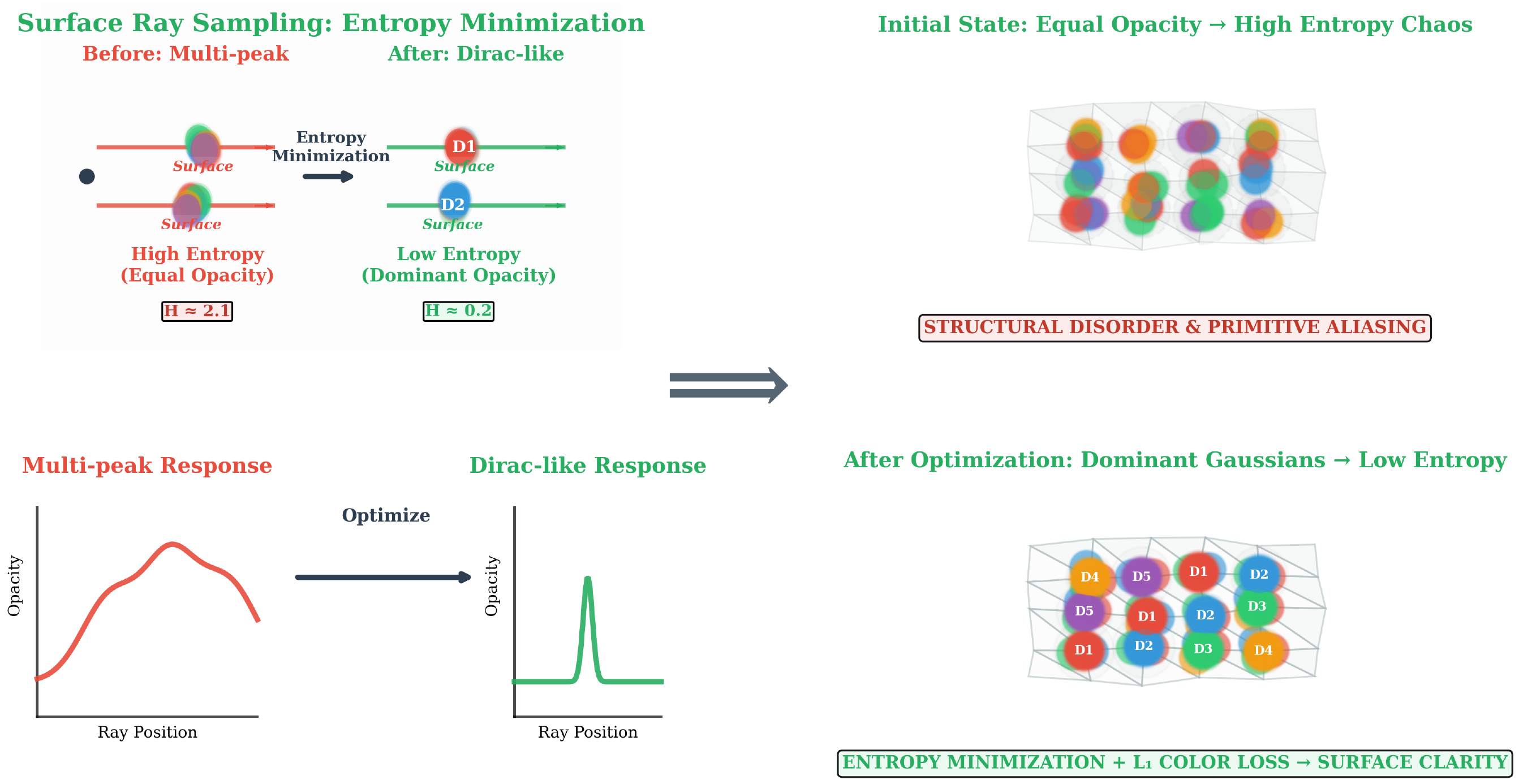
- 论文提出通过熵最小化实现低构型熵的表面建模,同时结合自适应正则化和多尺度几何保留技术。
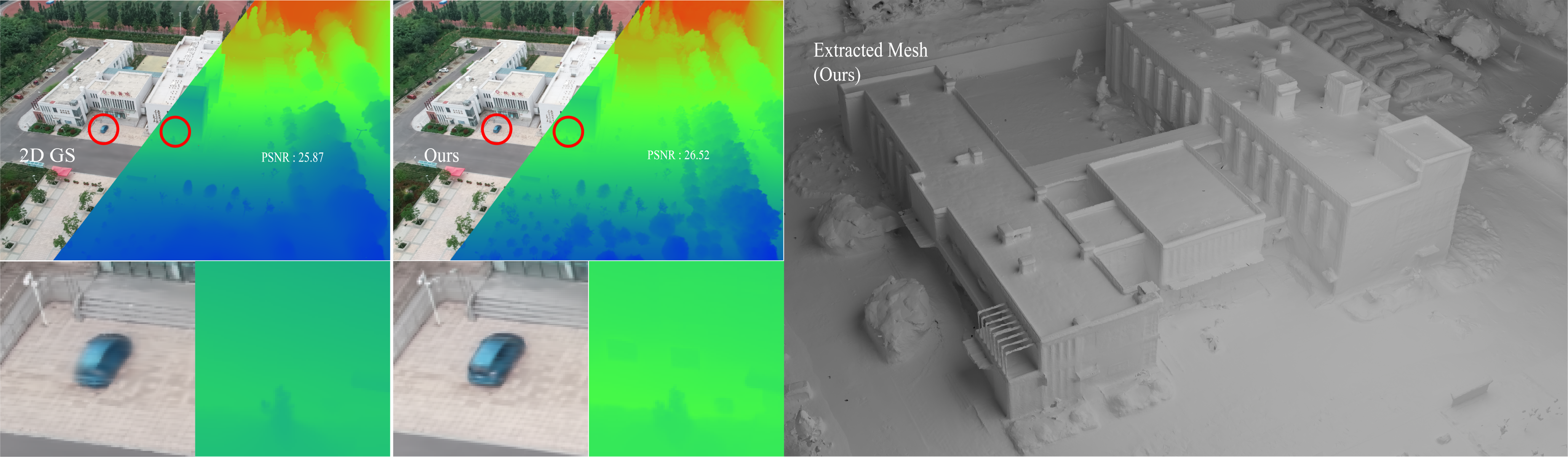
- 实验结果显示,GEF在DTU和T&T基准上取得了优异的Chamfer距离和F1分数,且在Mip-NeRF 360上表现出最佳的SSIM和LPIPS值。
📝 摘要(中文)
3D高斯点云(3DGS)作为新颖视图合成的领先技术,展现了卓越的渲染效率。论文指出,良好重建的表面自然表现出低构型熵,主导原语清晰定义表面几何,同时抑制冗余成分。作者提出三项技术贡献:通过熵最小化进行熵驱动的表面建模;利用表面邻域冗余指数(SNRI)和图像熵引导加权进行自适应空间正则化;通过竞争性跨尺度熵对齐实现多尺度几何保留。实验表明,GEF在DTU和T&T基准上实现了竞争性的几何精度,并在Mip-NeRF 360上提供了优越的渲染质量。
🔬 方法详解
问题定义:本论文旨在解决现有3D高斯点云重建中冗余成分对几何精度的影响,现有方法在处理复杂表面时常常无法有效抑制这些冗余成分。
核心思路:论文的核心思路是通过熵最小化来实现低构型熵的表面建模,确保主导原语能够清晰地定义表面几何,同时抑制冗余成分的影响。
技术框架:整体架构包括三个主要模块:熵驱动的表面建模、基于SNRI的自适应空间正则化以及多尺度几何保留。每个模块相互配合,形成一个完整的优化流程。
关键创新:最重要的技术创新在于引入了熵驱动的建模方法和自适应正则化机制,这与传统方法的静态处理方式形成鲜明对比,能够动态调整以适应不同的表面特征。
关键设计:在设计中,使用了表面邻域冗余指数(SNRI)作为自适应正则化的依据,同时结合图像熵引导的加权策略,确保在不同尺度下的几何特征能够得到有效保留。
🖼️ 关键图片

📊 实验亮点
实验结果显示,GEF在DTU基准上获得了0.64的Chamfer距离,在T&T基准上获得了0.44的F1分数,同时在Mip-NeRF 360上取得了最佳的SSIM(0.855)和LPIPS(0.136),显著优于现有基线方法,验证了其在表面重建精度和光度保真度上的提升。
🎯 应用场景
该研究在计算机视觉和图形学领域具有广泛的应用潜力,尤其是在虚拟现实、增强现实和游戏开发中,能够提供更高质量的三维重建和渲染效果。此外,随着技术的进步,未来可能在自动驾驶、机器人导航等领域也发挥重要作用。
📄 摘要(原文)
3D Gaussian Splatting (3DGS) has emerged as a leading technique for novel view synthesis, demonstrating exceptional rendering efficiency. \replaced[]{Well-reconstructed surfaces can be characterized by low configurational entropy, where dominant primitives clearly define surface geometry while redundant components are suppressed.}{The key insight is that well-reconstructed surfaces naturally exhibit low configurational entropy, where dominant primitives clearly define surface geometry while suppressing redundant components.} Three complementary technical contributions are introduced: (1) entropy-driven surface modeling via entropy minimization for low configurational entropy in primitive distributions; (2) adaptive spatial regularization using the Surface Neighborhood Redundancy Index (SNRI) and image entropy-guided weighting; (3) multi-scale geometric preservation through competitive cross-scale entropy alignment. Extensive experiments demonstrate that GEF achieves competitive geometric precision on DTU and T\&T benchmarks, while delivering superior rendering quality compared to existing methods on Mip-NeRF 360. Notably, superior Chamfer Distance (0.64) on DTU and F1 score (0.44) on T\&T are obtained, alongside the best SSIM (0.855) and LPIPS (0.136) among baselines on Mip-NeRF 360, validating the framework's ability to enhance surface reconstruction accuracy without compromising photometric fidelity.