SurfFill: Completion of LiDAR Point Clouds via Gaussian Surfel Splatting
作者: Svenja Strobel, Matthias Innmann, Bernhard Egger, Marc Stamminger, Linus Franke
分类: cs.CV, cs.GR, cs.RO
发布日期: 2025-12-02
备注: Project page: https://lfranke.github.io/surffill
💡 一句话要点
SurfFill:利用高斯 Surfel Splatting 完成 LiDAR 点云补全
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: LiDAR点云补全 高斯Surfel 三维重建 点云处理 歧义区域检测
📋 核心要点
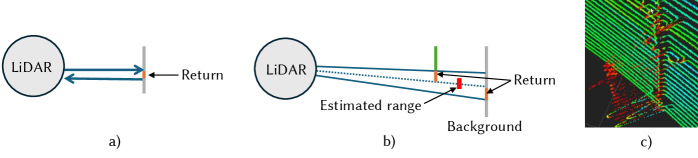
- LiDAR点云在薄结构和边缘区域易受光束发散影响,导致数据缺失和伪影。
- SurfFill利用高斯surfel重建,通过歧义启发式方法识别缺失区域,并在此区域优化点云补全。
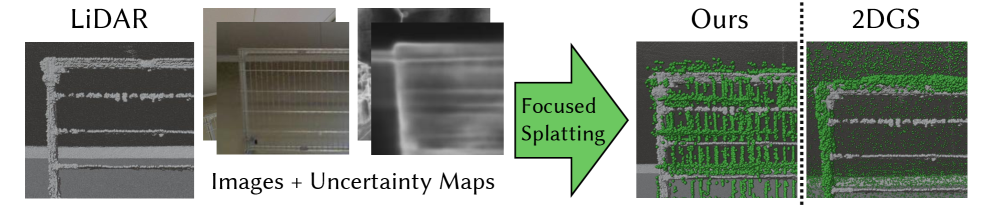
- 实验表明,SurfFill在合成和真实场景中均优于现有LiDAR点云补全方法,尤其是在薄结构和边缘区域。
📝 摘要(中文)
LiDAR点云通常被认为是主动3D重建的金标准。虽然在平坦区域精度很高,但容易遗漏小的几何结构,并且可能在深色、吸收性材料上失效。多角度拍摄照片并应用3D摄影测量可以推断出这些细节,因为它们通常代表富含特征的区域。然而,LiDAR在无特征区域的精度很少能达到。因此,我们提出SurfFill:一种基于高斯surfel的LiDAR补全方案,结合了LiDAR和基于相机的捕获的优势。我们分析了LiDAR捕获,并将LiDAR光束发散归因于伪影的主要因素,主要表现在薄结构和边缘。我们利用这一见解,通过评估点云中密度的变化,为完成的扫描引入了歧义启发式方法。这使我们能够识别靠近遗漏区域的点,然后我们可以从中生长额外的点来完成扫描。对于这种点的生长,我们约束高斯surfel重建[Huang et al. 2024],以将优化和密集化集中在这些模糊区域。最后,提取模糊区域重建的高斯基元并对其进行采样以获得点,从而完成点云。为了解决大规模重建的挑战,我们使用分而治之的方案扩展了此流程,以完成建筑物大小的点云。我们在合成和真实场景的LiDAR点云补全任务上进行了评估,发现我们的方法优于以前的重建方法。
🔬 方法详解
问题定义:LiDAR点云在获取过程中,由于光束发散、材料吸收等因素,容易在薄结构、边缘等区域产生数据缺失或伪影,导致三维重建质量下降。现有方法难以有效处理这些问题,尤其是在大规模场景下,重建效率和精度难以兼顾。
核心思路:SurfFill的核心思路是结合LiDAR的优势和基于图像的重建方法,利用高斯surfel表示点云,并针对LiDAR数据中的歧义区域进行重点优化和补全。通过分析点云密度变化,识别潜在的缺失区域,并约束高斯surfel重建过程,使其专注于这些区域的点云生成。
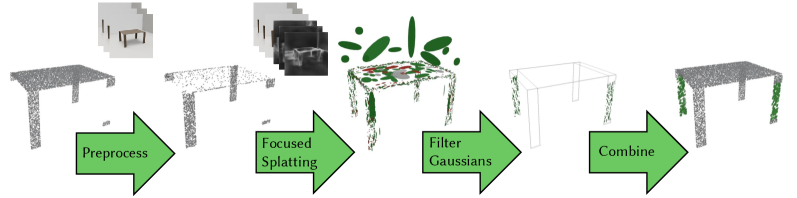
技术框架:SurfFill的整体流程包括以下几个阶段:1) LiDAR数据分析,识别歧义区域;2) 基于高斯surfel的初始重建;3) 歧义区域的点云补全,通过约束优化和采样生成新的点;4) 对于大规模场景,采用分而治之的策略,将场景分割成小块进行处理,最后合并结果。
关键创新:SurfFill的关键创新在于:1) 提出了一种基于点云密度变化的歧义启发式方法,能够有效识别LiDAR数据中的缺失区域;2) 将高斯surfel重建与歧义区域的重点优化相结合,提高了点云补全的精度和效率;3) 针对大规模场景,设计了分而治之的策略,实现了高效的点云补全。
关键设计:歧义启发式方法通过计算点云密度变化来识别潜在的缺失区域。高斯surfel重建采用Huang et al. 2024提出的方法,并针对歧义区域进行约束优化,例如,可以调整损失函数,增加对歧义区域点云的权重。分而治之的策略需要合理地分割场景,并保证相邻块之间的平滑过渡。
🖼️ 关键图片
📊 实验亮点
SurfFill在合成和真实场景的点云补全任务中均取得了显著的性能提升。实验结果表明,SurfFill能够有效地补全LiDAR数据中的缺失区域,尤其是在薄结构和边缘区域,重建质量优于现有方法。具体性能数据(例如,在特定数据集上的精度提升百分比)未知,但论文强调了SurfFill在视觉效果和定量指标上的优势。
🎯 应用场景
SurfFill技术可应用于自动驾驶、机器人导航、三维地图重建、城市建模等领域。通过提高LiDAR点云的完整性和准确性,可以提升自动驾驶系统的环境感知能力,增强机器人在复杂环境中的导航能力,并为城市规划和管理提供更精确的三维模型。
📄 摘要(原文)
LiDAR-captured point clouds are often considered the gold standard in active 3D reconstruction. While their accuracy is exceptional in flat regions, the capturing is susceptible to miss small geometric structures and may fail with dark, absorbent materials. Alternatively, capturing multiple photos of the scene and applying 3D photogrammetry can infer these details as they often represent feature-rich regions. However, the accuracy of LiDAR for featureless regions is rarely reached. Therefore, we suggest combining the strengths of LiDAR and camera-based capture by introducing SurfFill: a Gaussian surfel-based LiDAR completion scheme. We analyze LiDAR capturings and attribute LiDAR beam divergence as a main factor for artifacts, manifesting mostly at thin structures and edges. We use this insight to introduce an ambiguity heuristic for completed scans by evaluating the change in density in the point cloud. This allows us to identify points close to missed areas, which we can then use to grow additional points from to complete the scan. For this point growing, we constrain Gaussian surfel reconstruction [Huang et al. 2024] to focus optimization and densification on these ambiguous areas. Finally, Gaussian primitives of the reconstruction in ambiguous areas are extracted and sampled for points to complete the point cloud. To address the challenges of large-scale reconstruction, we extend this pipeline with a divide-and-conquer scheme for building-sized point cloud completion. We evaluate on the task of LiDAR point cloud completion of synthetic and real-world scenes and find that our method outperforms previous reconstruction methods.