Robust 3DGS-based SLAM via Adaptive Kernel Smoothing
作者: Shouhe Zhang, Dayong Ren, Sensen Song, Wenjie Li, Piaopiao Yu, Yurong Qian
分类: cs.CV
发布日期: 2025-11-28
💡 一句话要点
提出基于自适应核平滑的鲁棒3DGS-SLAM,提升相机位姿跟踪精度
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 3DGS-SLAM 鲁棒性 光栅化 核平滑 相机位姿跟踪
📋 核心要点
- 传统3DGS-SLAM过度依赖渲染质量,对参数误差敏感,导致相机位姿跟踪不稳定。
- 提出CB-KNN方法,通过自适应平滑核策略,使光栅化过程对参数误差更具鲁棒性。
- 实验表明,该方法在保持场景重建质量的同时,显著提升了相机位姿跟踪的鲁棒性和精度。
📝 摘要(中文)
本文挑战了3DGS-SLAM中渲染质量是跟踪精度主要决定因素的传统观念。我们认为,相比于单纯追求完美的场景表示,增强光栅化过程对参数误差的鲁棒性,以确保稳定的相机位姿跟踪更为关键。为此,我们提出了一种利用平滑核策略来增强基于3DGS的SLAM鲁棒性的新方法。与传统方法专注于最小化渲染误差不同,我们的核心思想是使光栅化过程更能抵抗3DGS参数的不完善性。我们假设,通过允许每个高斯在渲染期间影响更平滑、更广泛的像素分布,我们可以减轻来自异常高斯参数噪声的有害影响。这种方法有意地在渲染图像中引入可控的模糊,作为一种正则化项,稳定后续的位姿优化。虽然完全重新设计光栅化流水线是一个理想的解决方案,但我们提出了一种实用且有效的替代方案,可以轻松集成到现有的3DGS框架中。我们的方法称为Corrective Blurry KNN (CB-KNN),自适应地修改局部区域内K近邻高斯的RGB值和位置。这种动态调整产生更平滑的局部渲染,减少了错误GS参数对整体图像的影响。实验结果表明,我们的方法在保持场景重建(建图)整体质量的同时,显著提高了相机位姿跟踪的鲁棒性和准确性。
🔬 方法详解
问题定义:现有的3DGS-SLAM方法通常将渲染质量作为跟踪精度的主要决定因素,因此过度关注场景表示的完美性。然而,这种方法对3DGS参数的误差非常敏感,尤其是在存在噪声或异常值的情况下,会导致光栅化过程不稳定,进而影响相机位姿跟踪的准确性和鲁棒性。现有方法缺乏对光栅化过程本身鲁棒性的考虑。
核心思路:本文的核心思路是通过引入可控的模糊来平滑光栅化过程,从而提高其对参数误差的鲁棒性。具体来说,允许每个高斯在渲染时影响更广泛的像素分布,减轻异常高斯参数噪声的影响。这种模糊起到正则化的作用,稳定后续的位姿优化。核心在于牺牲一定的渲染清晰度,换取更稳定的跟踪性能。
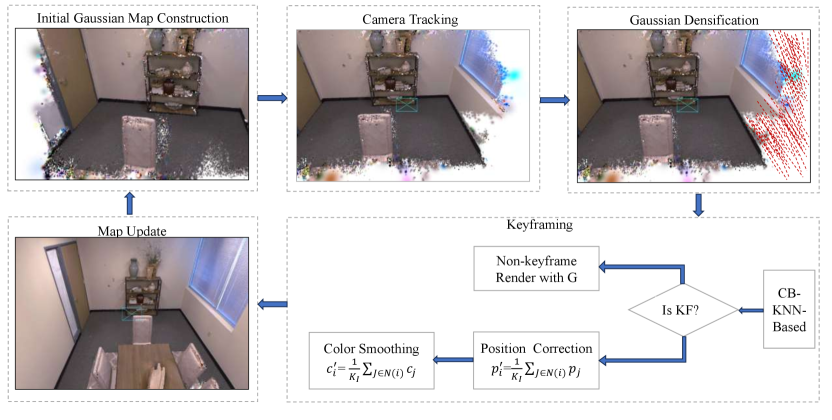
技术框架:该方法的核心模块是Corrective Blurry KNN (CB-KNN)。它在现有的3DGS框架的光栅化阶段进行改进,主要分为以下步骤:1. 确定每个像素的K近邻高斯;2. 自适应地修改这些高斯的RGB值和位置,使其渲染结果更加平滑;3. 使用修改后的高斯参数进行渲染,生成带有可控模糊的图像;4. 使用该图像进行后续的位姿优化。
关键创新:该方法最重要的创新点在于,它改变了3DGS-SLAM中“渲染质量越高越好”的传统观念,转而关注光栅化过程的鲁棒性。通过引入可控的模糊,使系统对参数误差的容忍度更高,从而提高了整体的跟踪性能。与现有方法专注于最小化渲染误差不同,该方法有意引入误差(模糊)来提高鲁棒性。
关键设计:CB-KNN的关键设计在于如何自适应地修改K近邻高斯的RGB值和位置。具体来说,可以使用加权平均或其他平滑函数来调整这些参数,权重可以基于高斯之间的距离或其他相关性指标。模糊的程度可以通过调整平滑函数的参数来控制。损失函数方面,除了传统的渲染损失外,还可以加入正则化项来约束模糊的程度,防止过度模糊导致场景细节丢失。
🖼️ 关键图片

📊 实验亮点
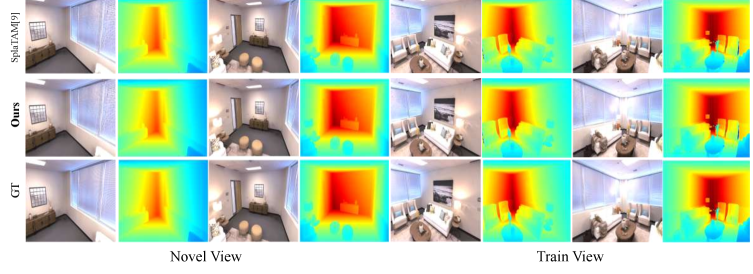
实验结果表明,CB-KNN方法在保持场景重建质量的同时,显著提高了相机位姿跟踪的鲁棒性和准确性。具体性能提升数据未知,但摘要强调了在存在参数误差的情况下,该方法能够提供更稳定的跟踪结果。该方法易于集成到现有的3DGS框架中,具有很强的实用性。
🎯 应用场景
该研究成果可应用于增强现实、机器人导航、自动驾驶等领域。通过提高SLAM系统的鲁棒性,可以使其在光照变化、遮挡、动态环境等复杂场景下更加稳定可靠。该方法尤其适用于资源受限的平台,例如移动设备和无人机,因为它可以减少对高精度传感器和计算资源的需求。
📄 摘要(原文)
In this paper, we challenge the conventional notion in 3DGS-SLAM that rendering quality is the primary determinant of tracking accuracy. We argue that, compared to solely pursuing a perfect scene representation, it is more critical to enhance the robustness of the rasterization process against parameter errors to ensure stable camera pose tracking. To address this challenge, we propose a novel approach that leverages a smooth kernel strategy to enhance the robustness of 3DGS-based SLAM. Unlike conventional methods that focus solely on minimizing rendering error, our core insight is to make the rasterization process more resilient to imperfections in the 3DGS parameters. We hypothesize that by allowing each Gaussian to influence a smoother, wider distribution of pixels during rendering, we can mitigate the detrimental effects of parameter noise from outlier Gaussians. This approach intentionally introduces a controlled blur to the rendered image, which acts as a regularization term, stabilizing the subsequent pose optimization. While a complete redesign of the rasterization pipeline is an ideal solution, we propose a practical and effective alternative that is readily integrated into existing 3DGS frameworks. Our method, termed Corrective Blurry KNN (CB-KNN), adaptively modifies the RGB values and locations of the K-nearest neighboring Gaussians within a local region. This dynamic adjustment generates a smoother local rendering, reducing the impact of erroneous GS parameters on the overall image. Experimental results demonstrate that our approach, while maintaining the overall quality of the scene reconstruction (mapping), significantly improves the robustness and accuracy of camera pose tracking.