MambaNetLK: Enhancing Colonoscopy Point Cloud Registration with Mamba
作者: Linzhe Jiang, Jiayuan Huang, Sophia Bano, Matthew J. Clarkson, Zhehua Mao, Mobarak I. Hoque
分类: cs.CV
发布日期: 2025-10-31
备注: 12 pages, 4 figures, 3 tables, IPCAI conference
💡 一句话要点
MambaNetLK:利用Mamba SSM增强结肠镜点云配准,提升手术导航精度
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 点云配准 Mamba SSM 内窥镜导航 Lucas-Kanade算法 临床数据集 手术导航 三维重建
📋 核心要点
- 生物组织重复纹理和局部同质几何导致特征退化,术前术中数据差异进一步降低配准稳定性,这是现有3D点云配准方法面临的核心挑战。
- MambaNetLK通过将Mamba状态空间模型(SSM)集成到PointNetLK架构中,作为跨模态特征提取器,有效捕获长程依赖关系,提升配准精度。
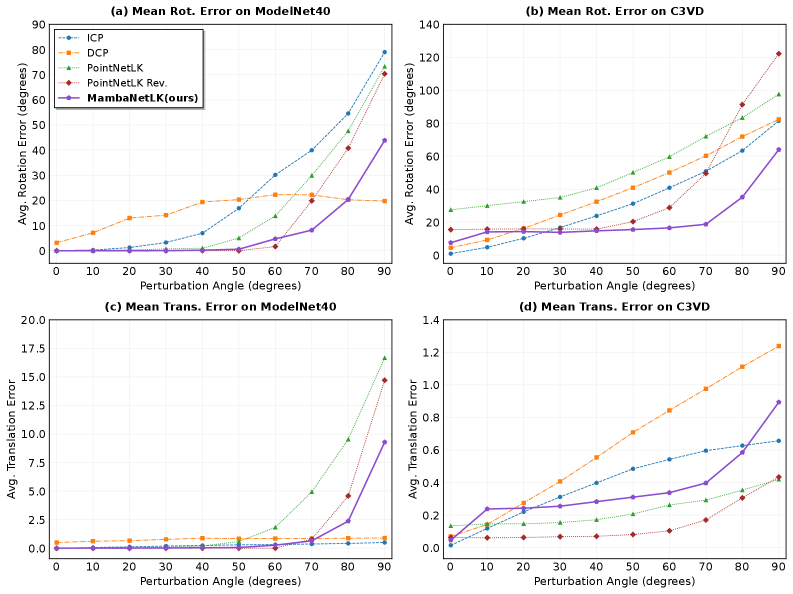
- 在临床数据集C3VD-Raycasting-10k上,MambaNetLK显著优于现有方法,中值旋转误差降低56.04%,RMSE平移误差降低26.19%,并展现出良好的泛化性和鲁棒性。
📝 摘要(中文)
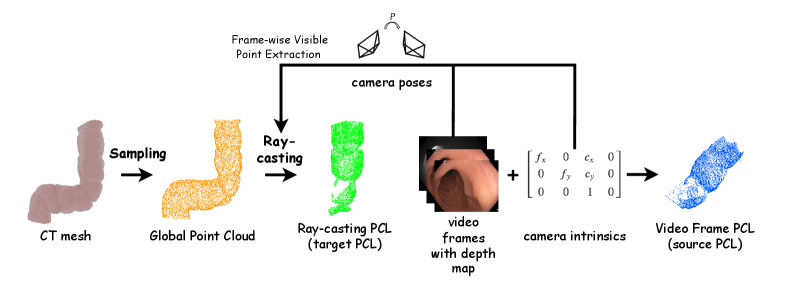
本文提出了一种针对内窥镜导航的3D点云配准新方法MambaNetLK,并构建了一个高质量的临床数据集C3VD-Raycasting-10k,用于支持严格和可复现的基准测试。该数据集包含10014个几何对齐的点云对,来源于临床CT数据。MambaNetLK通过集成Mamba状态空间模型(SSM)作为跨模态特征提取器来增强PointNetLK架构,从而以线性时间复杂度有效地捕获长程依赖关系。配准过程通过Lucas-Kanade算法迭代实现。在临床数据集C3VD-Raycasting-10k上,MambaNetLK相比于现有最佳方法,中值旋转误差降低了56.04%,RMSE平移误差降低了26.19%。该模型在ModelNet40上也表现出强大的泛化能力,并且对初始姿态扰动具有优越的鲁棒性。MambaNetLK为手术导航中的3D配准提供了坚实的基础,结合全局表达的基于SSM的特征提取器和大规模临床数据集,能够在微创手术(如结肠镜检查)中实现更准确和可靠的引导系统。
🔬 方法详解
问题定义:论文旨在解决内窥镜手术中3D点云配准的精度和鲁棒性问题。现有方法在处理生物组织的重复纹理和局部同质几何时,容易出现特征退化,导致配准精度下降。此外,术前CT数据和术中内窥镜图像之间存在显著的域偏移,进一步降低了配准的稳定性。
核心思路:论文的核心思路是利用Mamba状态空间模型(SSM)强大的长程依赖建模能力,提取更具区分性的点云特征,从而提高配准的准确性和鲁棒性。Mamba SSM能够以线性时间复杂度处理序列数据,适合处理点云数据中的全局上下文信息。
技术框架:MambaNetLK基于PointNetLK框架,并将其中的特征提取模块替换为Mamba SSM。整体流程如下:首先,使用Mamba SSM提取源点云和目标点云的特征;然后,利用Lucas-Kanade算法迭代优化变换矩阵,使源点云与目标点云对齐;最后,输出配准后的点云。
关键创新:最重要的技术创新点是将Mamba SSM引入到点云配准任务中。与传统的卷积神经网络或Transformer相比,Mamba SSM能够更有效地捕获点云数据中的长程依赖关系,从而提取更具全局性的特征。此外,论文还构建了一个大规模的临床数据集C3VD-Raycasting-10k,为点云配准算法的评估和比较提供了可靠的基准。
关键设计:MambaNetLK使用Mamba SSM作为特征提取器,其具体结构和参数设置需要根据具体任务进行调整。Lucas-Kanade算法的迭代次数和收敛阈值也会影响配准的精度和速度。损失函数通常采用点云之间的距离度量,例如均方误差或Hausdorff距离。
🖼️ 关键图片

📊 实验亮点
MambaNetLK在临床数据集C3VD-Raycasting-10k上取得了显著的性能提升,相比于现有最佳方法,中值旋转误差降低了56.04%,RMSE平移误差降低了26.19%。此外,该模型在ModelNet40数据集上表现出强大的泛化能力,并且对初始姿态扰动具有优越的鲁棒性,证明了其在复杂环境下的实用性。
🎯 应用场景
MambaNetLK在内窥镜手术导航领域具有广阔的应用前景,可用于提高病灶定位的准确性、辅助手术边缘评估以及增强导航安全性。该方法能够提升微创手术的精确性和可靠性,减少手术风险,改善患者预后。未来,该技术有望推广到其他医学影像引导手术中,例如腹腔镜手术和神经外科手术。
📄 摘要(原文)
Accurate 3D point cloud registration underpins reliable image-guided colonoscopy, directly affecting lesion localization, margin assessment, and navigation safety. However, biological tissue exhibits repetitive textures and locally homogeneous geometry that cause feature degeneracy, while substantial domain shifts between pre-operative anatomy and intra-operative observations further degrade alignment stability. To address these clinically critical challenges, we introduce a novel 3D registration method tailored for endoscopic navigation and a high-quality, clinically grounded dataset to support rigorous and reproducible benchmarking. We introduce C3VD-Raycasting-10k, a large-scale benchmark dataset with 10,014 geometrically aligned point cloud pairs derived from clinical CT data. We propose MambaNetLK, a novel correspondence-free registration framework, which enhances the PointNetLK architecture by integrating a Mamba State Space Model (SSM) as a cross-modal feature extractor. As a result, the proposed framework efficiently captures long-range dependencies with linear-time complexity. The alignment is achieved iteratively using the Lucas-Kanade algorithm. On the clinical dataset, C3VD-Raycasting-10k, MambaNetLK achieves the best performance compared with the state-of-the-art methods, reducing median rotation error by 56.04% and RMSE translation error by 26.19% over the second-best method. The model also demonstrates strong generalization on ModelNet40 and superior robustness to initial pose perturbations. MambaNetLK provides a robust foundation for 3D registration in surgical navigation. The combination of a globally expressive SSM-based feature extractor and a large-scale clinical dataset enables more accurate and reliable guidance systems in minimally invasive procedures like colonoscopy.