WildfireX-SLAM: A Large-scale Low-altitude RGB-D Dataset for Wildfire SLAM and Beyond
作者: Zhicong Sun, Jacqueline Lo, Jinxing Hu
分类: cs.CV, cs.RO
发布日期: 2025-10-31
备注: This paper has been accepted by MMM 2026
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
WildfireX-SLAM:用于野火SLAM及其他应用的大规模低空RGB-D数据集
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: SLAM 三维高斯溅射 RGB-D数据集 野火 森林环境 无人机 合成数据
📋 核心要点
- 现有基于3DGS的SLAM方法主要集中于小规模室内场景,缺乏针对大规模森林环境的有效解决方案,阻碍了其在野火应急响应等领域的应用。
- 论文构建了一个大规模、高质量的合成数据集WildfireX-SLAM,包含丰富的RGB-D图像和环境信息,为森林场景下的SLAM研究提供了数据基础。
- 通过在WildfireX-SLAM上进行基准测试,论文揭示了3DGS-based SLAM在森林环境中的挑战,并为未来的改进方向提供了参考。
📝 摘要(中文)
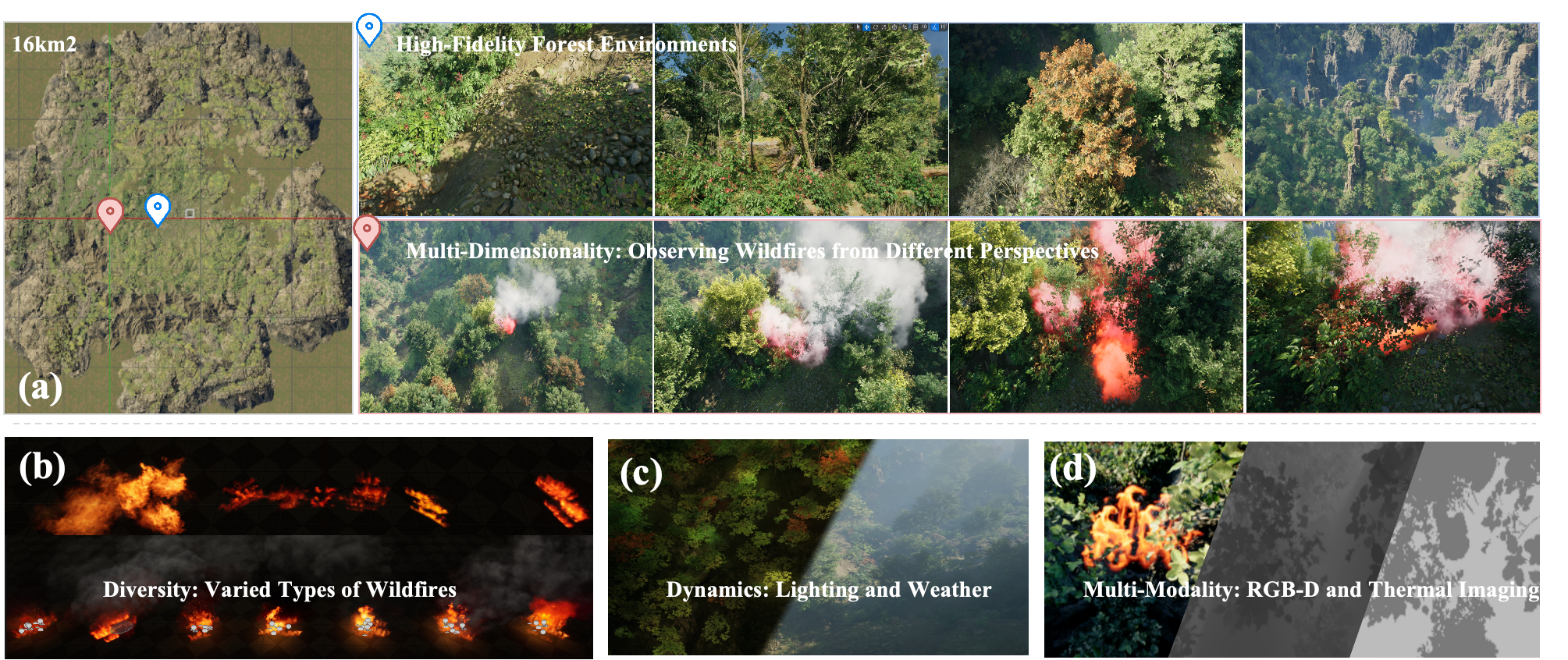
三维高斯溅射(3DGS)及其变体在同步定位与建图(SLAM)方面取得了显著进展。虽然最近大多数基于3DGS的SLAM工作都集中在小规模室内场景,但开发用于大规模森林场景的基于3DGS的SLAM方法对于许多实际应用具有巨大的潜力,尤其是在野火应急响应和森林管理方面。然而,由于缺乏全面和高质量的数据集,这项研究受到了阻碍,并且在真实场景中收集此类数据集的成本高昂且技术上不可行。为此,我们构建了一个大规模、全面和高质量的合成数据集,用于野火和森林环境中的SLAM。利用Unreal Engine 5 Electric Dreams环境示例项目,我们开发了一个管道,可以轻松地收集无人机的空中和地面视图,包括地面实况相机姿势和来自无人机的各种附加数据模态。我们的管道还提供了对环境因素(如光照、天气以及野火的类型和条件)的灵活控制,支持涵盖森林测绘、野火应急响应等各种任务的需求。由此产生的试点数据集WildfireX-SLAM包含来自一个总面积为16平方公里的大规模森林地图的5.5k低空RGB-D航拍图像。在WildfireX-SLAM的基础上,还进行了全面的基准测试,这不仅揭示了基于3DGS的SLAM在森林中面临的独特挑战,而且突出了未来工作的潜在改进。数据集和代码将公开提供。
🔬 方法详解
问题定义:论文旨在解决大规模森林环境中SLAM数据集匮乏的问题,现有方法难以直接应用于该场景,缺乏针对野火等特殊环境的建模和评估。现有数据集难以满足算法在复杂光照、天气和野火条件下的鲁棒性测试需求。
核心思路:论文利用Unreal Engine 5强大的渲染能力,构建一个大规模的合成森林环境,并模拟各种光照、天气和野火条件。通过无人机视角,生成包含RGB-D图像和相机姿态真值的数据集,为森林环境下的SLAM算法研究提供数据支撑。
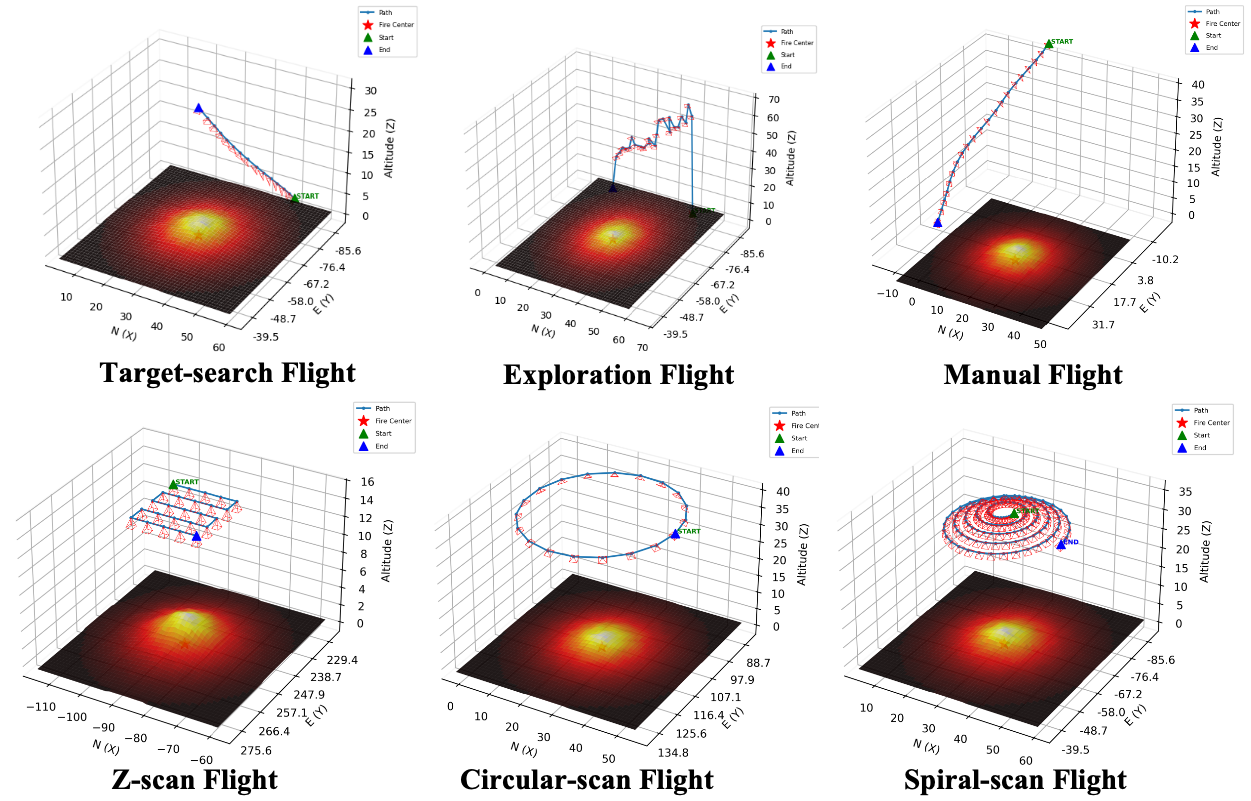
技术框架:该方法主要包含以下几个阶段:1) 基于Unreal Engine 5构建大规模森林场景;2) 设计无人机飞行轨迹,模拟空中和地面视角;3) 渲染生成RGB-D图像,并记录相机姿态真值;4) 控制环境参数,如光照、天气和野火条件,生成多样化的数据集。
关键创新:该论文的关键创新在于构建了一个大规模、高质量的合成数据集,专门用于森林环境下的SLAM研究。该数据集不仅包含RGB-D图像和相机姿态真值,还模拟了各种光照、天气和野火条件,为算法的鲁棒性测试提供了可能。
关键设计:论文利用Unreal Engine 5 Electric Dreams环境示例项目作为基础场景,并通过调整环境参数来模拟不同的光照、天气和野火条件。无人机飞行轨迹的设计考虑了场景的覆盖度和视角的丰富性。数据集包含5.5k低空RGB-D航拍图像,覆盖16平方公里的森林地图。
🖼️ 关键图片

📊 实验亮点
论文在WildfireX-SLAM数据集上进行了基准测试,揭示了3DGS-based SLAM在森林环境中面临的挑战,例如光照变化、植被遮挡等。实验结果表明,现有算法在森林环境下的性能有待提高,并为未来的研究方向提供了参考。该数据集的发布将促进相关算法的改进和优化。
🎯 应用场景
该研究成果可广泛应用于森林测绘、野火应急响应、森林管理等领域。通过使用WildfireX-SLAM数据集,研究人员可以开发更鲁棒、更高效的SLAM算法,从而提高无人机在森林环境中的自主导航能力,为野火监测、灾情评估和资源管理提供技术支持。该数据集的发布将促进相关领域的研究进展。
📄 摘要(原文)
3D Gaussian splatting (3DGS) and its subsequent variants have led to remarkable progress in simultaneous localization and mapping (SLAM). While most recent 3DGS-based SLAM works focus on small-scale indoor scenes, developing 3DGS-based SLAM methods for large-scale forest scenes holds great potential for many real-world applications, especially for wildfire emergency response and forest management. However, this line of research is impeded by the absence of a comprehensive and high-quality dataset, and collecting such a dataset over real-world scenes is costly and technically infeasible. To this end, we have built a large-scale, comprehensive, and high-quality synthetic dataset for SLAM in wildfire and forest environments. Leveraging the Unreal Engine 5 Electric Dreams Environment Sample Project, we developed a pipeline to easily collect aerial and ground views, including ground-truth camera poses and a range of additional data modalities from unmanned aerial vehicle. Our pipeline also provides flexible controls on environmental factors such as light, weather, and types and conditions of wildfire, supporting the need for various tasks covering forest mapping, wildfire emergency response, and beyond. The resulting pilot dataset, WildfireX-SLAM, contains 5.5k low-altitude RGB-D aerial images from a large-scale forest map with a total size of 16 km2. On top of WildfireX-SLAM, a thorough benchmark is also conducted, which not only reveals the unique challenges of 3DGS-based SLAM in the forest but also highlights potential improvements for future works. The dataset and code will be publicly available. Project page: https://zhicongsun.github.io/wildfirexslam.