AtlasGS: Atlanta-world Guided Surface Reconstruction with Implicit Structured Gaussians
作者: Xiyu Zhang, Chong Bao, Yipeng Chen, Hongjia Zhai, Yitong Dong, Hujun Bao, Zhaopeng Cui, Guofeng Zhang
分类: cs.CV
发布日期: 2025-10-29
备注: 18 pages, 11 figures. NeurIPS 2025; Project page: https://zju3dv.github.io/AtlasGS/
💡 一句话要点
提出基于Atlanta-world引导的隐式结构高斯溅射,实现室内外场景高精度重建。
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 三维重建 高斯溅射 Atlanta-world模型 隐式表示 结构平面正则化
📋 核心要点
- 现有方法在室内外低纹理区域重建中缺乏全局一致性,且高斯溅射等方法存在不连续性和效率问题。
- 利用Atlanta-world模型指导隐式结构高斯溅射,实现平滑且高精度的表面重建,兼顾效率与细节。
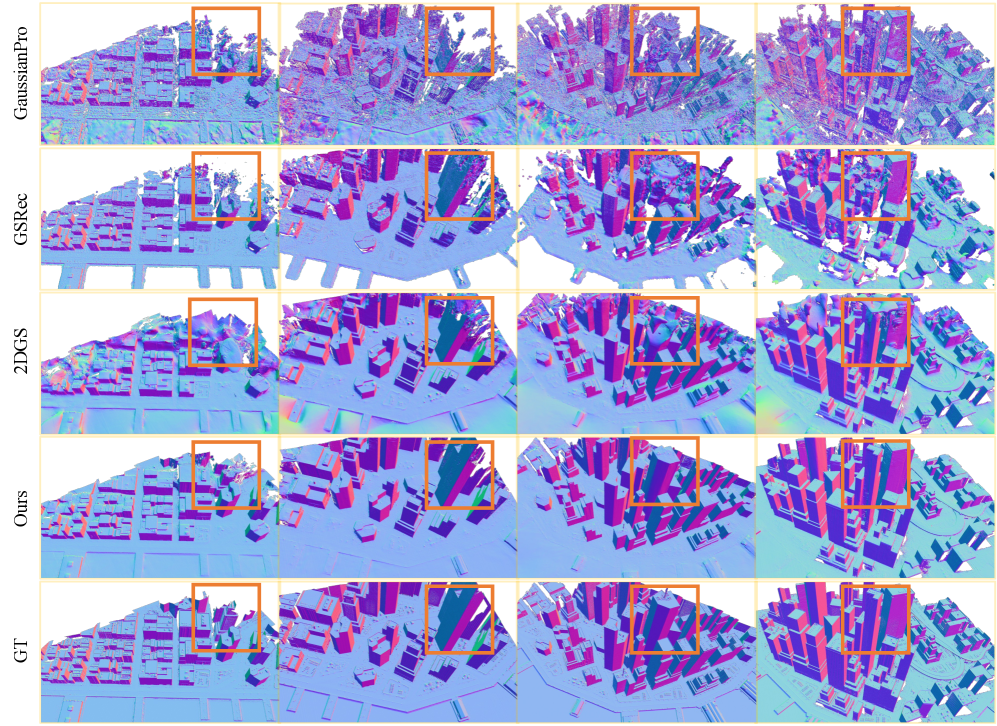
- 实验结果表明,该方法在室内外场景中均优于现有技术,显著提升了表面重建质量。
📝 摘要(中文)
室内和城市环境的三维重建是一个重要的研究课题,具有广泛的下游应用。然而,现有的几何先验在解决室内和城市环境中低纹理区域的问题时,通常缺乏全局一致性。此外,高斯溅射和隐式SDF场通常存在不连续性或计算效率低下,导致细节丢失。为了解决这些问题,我们提出了一种基于Atlanta-world引导的隐式结构高斯溅射方法,该方法实现了平滑的室内和城市场景重建,同时保留了高频细节和渲染效率。通过利用Atlanta-world模型,我们确保了低纹理区域的精确表面重建,而我们提出的新型隐式结构GS表示在不牺牲效率和高频细节的情况下提供了平滑性。具体来说,我们提出了一种语义GS表示来预测所有语义区域的概率,并部署了一种具有可学习平面指示器的结构平面正则化,以实现全局精确的表面重建。大量的实验表明,我们的方法在室内和城市场景中都优于最先进的方法,提供了卓越的表面重建质量。
🔬 方法详解
问题定义:论文旨在解决室内和城市环境中三维重建的挑战,特别是低纹理区域的精确重建问题。现有方法,如直接应用高斯溅射或隐式SDF场,在这些区域往往表现不佳,要么缺乏全局一致性,要么存在不连续性或计算效率问题,导致细节丢失。因此,如何有效地利用先验知识,在保证重建质量的同时兼顾效率,是本论文要解决的核心问题。
核心思路:论文的核心思路是结合Atlanta-world模型提供的全局结构先验,以及隐式结构高斯溅射的局部细节表达能力。Atlanta-world模型能够提供场景的全局结构信息,尤其是在低纹理区域,可以指导表面重建。而隐式结构高斯溅射则能够在保证平滑性的同时,保留高频细节和渲染效率。通过将两者结合,可以克服现有方法的局限性,实现高质量的室内外场景重建。
技术框架:该方法主要包含以下几个模块:1) 语义GS表示:用于预测所有语义区域的概率,为后续的结构平面正则化提供依据。2) 结构平面正则化:利用可学习的平面指示器,对高斯溅射进行正则化,确保全局精确的表面重建。该正则化过程受到Atlanta-world模型的指导,从而保证了全局一致性。3) 隐式结构高斯溅射:利用隐式函数对高斯溅射进行结构化,从而在保证平滑性的同时,保留高频细节和渲染效率。整个框架通过联合优化,实现高质量的表面重建。
关键创新:该方法的关键创新在于:1) Atlanta-world引导:首次将Atlanta-world模型引入到高斯溅射的重建过程中,利用其全局结构先验来指导表面重建,尤其是在低纹理区域。2) 隐式结构高斯溅射:提出了一种新型的隐式结构高斯溅射表示,能够在保证平滑性的同时,保留高频细节和渲染效率。3) 语义GS表示与结构平面正则化:通过语义信息指导结构平面正则化,进一步提升了重建的精度和全局一致性。与现有方法相比,该方法能够更好地处理低纹理区域,并实现更高质量的表面重建。
关键设计:论文中关键的设计包括:1) 可学习的平面指示器:用于结构平面正则化,能够自适应地学习场景中的平面结构。2) 语义GS表示的网络结构:用于预测语义区域概率,其设计需要考虑到计算效率和预测精度之间的平衡。3) 损失函数的设计:需要综合考虑重建精度、平滑性和全局一致性,以实现最佳的重建效果。具体的参数设置和网络结构细节在论文中有详细描述。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法在室内和城市场景中均优于当前最先进的方法。具体而言,在表面重建质量方面,该方法取得了显著的提升,尤其是在低纹理区域。论文中提供了详细的定量比较结果,包括与多个基线方法的对比,以及在不同数据集上的性能评估。这些实验结果充分证明了该方法的有效性和优越性。
🎯 应用场景
该研究成果可广泛应用于室内导航、城市建模、自动驾驶、机器人场景理解等领域。高质量的三维重建能够为这些应用提供精确的环境信息,提升系统的性能和可靠性。未来,该方法可以进一步扩展到动态场景重建、大规模场景重建等更具挑战性的任务中,具有重要的实际应用价值和学术研究意义。
📄 摘要(原文)
3D reconstruction of indoor and urban environments is a prominent research topic with various downstream applications. However, existing geometric priors for addressing low-texture regions in indoor and urban settings often lack global consistency. Moreover, Gaussian Splatting and implicit SDF fields often suffer from discontinuities or exhibit computational inefficiencies, resulting in a loss of detail. To address these issues, we propose an Atlanta-world guided implicit-structured Gaussian Splatting that achieves smooth indoor and urban scene reconstruction while preserving high-frequency details and rendering efficiency. By leveraging the Atlanta-world model, we ensure the accurate surface reconstruction for low-texture regions, while the proposed novel implicit-structured GS representations provide smoothness without sacrificing efficiency and high-frequency details. Specifically, we propose a semantic GS representation to predict the probability of all semantic regions and deploy a structure plane regularization with learnable plane indicators for global accurate surface reconstruction. Extensive experiments demonstrate that our method outperforms state-of-the-art approaches in both indoor and urban scenes, delivering superior surface reconstruction quality.