Leveraging AV1 motion vectors for Fast and Dense Feature Matching
作者: Julien Zouein, Hossein Javidnia, François Pitié, Anil Kokaram
分类: cs.CV
发布日期: 2025-10-20 (更新: 2025-10-21)
备注: Accepted ICIR 2025, camera-ready version
💡 一句话要点
利用AV1运动矢量实现快速稠密特征匹配,提升SfM效率
🎯 匹配领域: 支柱六:视频提取与匹配 (Video Extraction)
关键词: AV1编码 运动矢量 特征匹配 压缩域处理 三维重建
📋 核心要点
- 传统特征匹配方法计算量大,难以满足实时性和资源受限场景的需求。
- 利用AV1编码中的运动矢量,直接在压缩域提取特征,避免了像素级计算。
- 实验表明,该方法在短视频上能实现与SIFT相当的性能,同时显著降低CPU占用。
📝 摘要(中文)
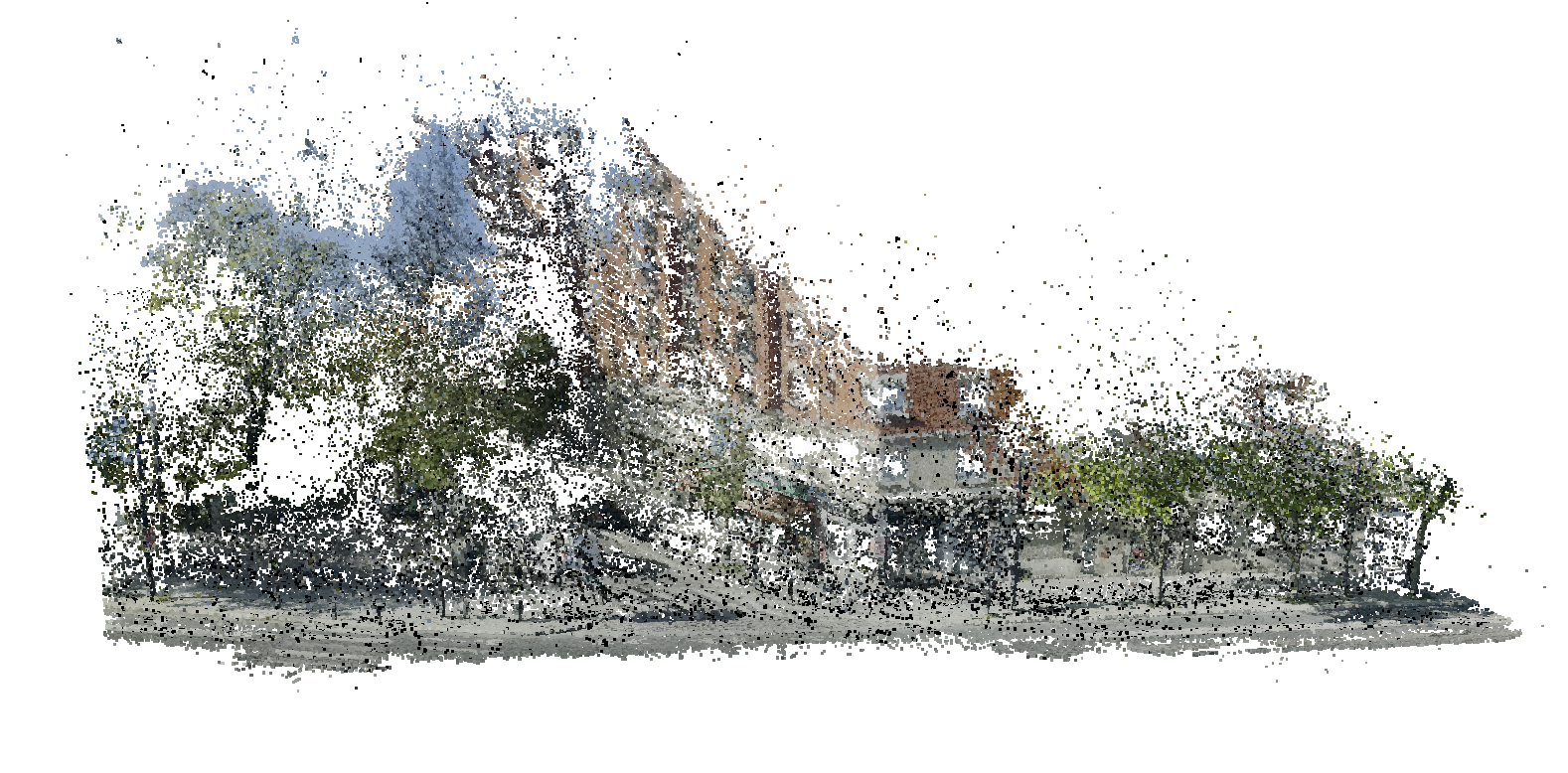
本文提出一种利用AV1运动矢量生成稠密亚像素对应关系和短轨迹的方法,并通过余弦一致性进行过滤。在短视频上,这种压缩域前端的运行速度与顺序SIFT相当,但CPU使用率远低于后者,并产生更稠密的匹配以及具有竞争力的成对几何结构。在一个包含117帧的片段上的小型SfM演示中,MV匹配注册了所有图像,并以0.51-0.53像素的重投影误差重建了0.46-0.62M个点;BA时间随匹配密度增长。这些结果表明,压缩域对应关系是一种实用且资源高效的前端,具有在完整流水线中扩展的清晰路径。
🔬 方法详解
问题定义:传统特征匹配方法,如SIFT,计算复杂度高,尤其是在高分辨率视频或大规模场景下,计算资源消耗巨大。这限制了它们在资源受限设备或实时应用中的应用。此外,这些方法通常在像素域进行计算,忽略了视频压缩过程中已经存在的运动信息。
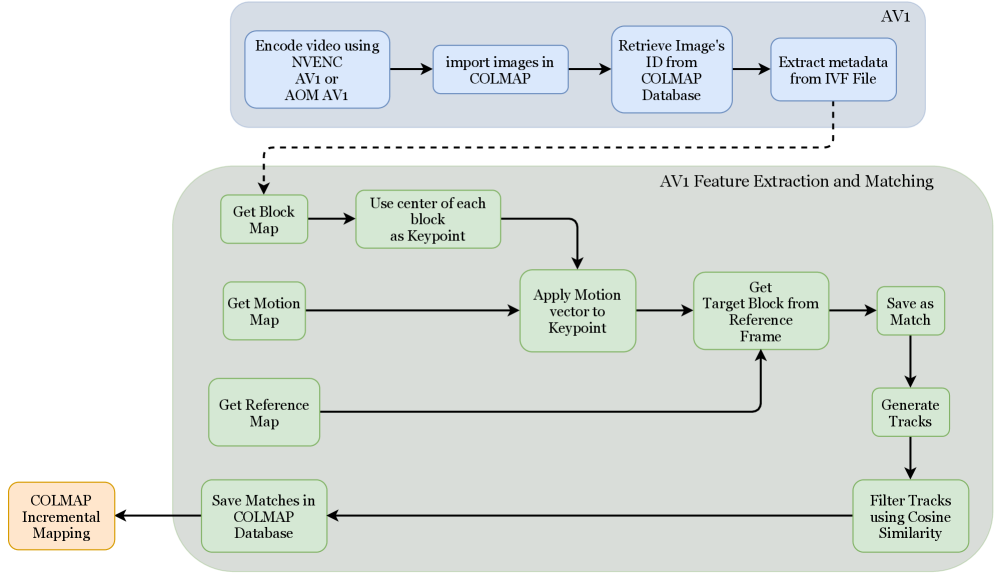
核心思路:本文的核心思路是利用视频编码标准AV1中现成的运动矢量(Motion Vectors, MVs)作为特征匹配的替代方案。AV1编码器为了进行帧间预测,已经计算了大量的运动矢量,这些矢量包含了图像中像素的运动信息。通过合理地利用这些信息,可以避免重复计算,从而提高特征匹配的效率。
技术框架:该方法主要包含以下几个阶段:1) 运动矢量提取:从AV1编码的视频流中提取运动矢量。2) 亚像素精度提升:对提取的运动矢量进行亚像素精度插值,以获得更精确的对应关系。3) 余弦一致性过滤:使用余弦相似度来过滤不一致的运动矢量,提高匹配的准确性。4) 几何验证:使用RANSAC等方法进行几何验证,进一步去除错误匹配。5) SfM重建:将匹配结果应用于Structure from Motion (SfM) 流程,进行三维重建。
关键创新:该方法最重要的创新点在于直接利用压缩域的运动矢量进行特征匹配,避免了在像素域进行耗时的特征提取和匹配过程。这种方法充分利用了视频编码过程中已经存在的运动信息,从而显著提高了特征匹配的效率。与传统的基于像素域的特征匹配方法相比,该方法在计算资源消耗方面具有显著优势。
关键设计:在亚像素精度提升方面,采用了双线性插值等方法。在余弦一致性过滤方面,计算相邻帧之间运动矢量的余弦相似度,并设置阈值来过滤不一致的运动矢量。在SfM重建方面,使用了标准的BA(Bundle Adjustment)算法进行优化。此外,论文还关注了运动矢量的密度和分布,并提出了一些策略来提高匹配的鲁棒性。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法在短视频上的运行速度与顺序SIFT相当,但CPU使用率显著降低。在包含117帧的视频片段上,该方法能够以0.51-0.53像素的重投影误差重建0.46-0.62M个点。这些结果表明,该方法是一种实用且资源高效的特征匹配前端。
🎯 应用场景
该研究成果可应用于实时视频处理、移动机器人导航、增强现实(AR)和虚拟现实(VR)等领域。通过利用压缩域的运动信息,可以在资源受限的设备上实现高效的特征匹配和三维重建,为这些应用提供更强大的计算能力。未来,该方法有望扩展到其他视频编码标准,并与其他计算机视觉算法相结合,实现更复杂的视觉任务。
📄 摘要(原文)
We repurpose AV1 motion vectors to produce dense sub-pixel correspondences and short tracks filtered by cosine consistency. On short videos, this compressed-domain front end runs comparably to sequential SIFT while using far less CPU, and yields denser matches with competitive pairwise geometry. As a small SfM demo on a 117-frame clip, MV matches register all images and reconstruct 0.46-0.62M points at 0.51-0.53,px reprojection error; BA time grows with match density. These results show compressed-domain correspondences are a practical, resource-efficient front end with clear paths to scaling in full pipelines.