PAGS: Priority-Adaptive Gaussian Splatting for Dynamic Driving Scenes
作者: Ying A, Wenzhang Sun, Chang Zeng, Chunfeng Wang, Hao Li, Jianxun Cui
分类: cs.CV
发布日期: 2025-10-14
💡 一句话要点
提出PAGS,用于动态驾驶场景中具有优先级自适应的高斯溅射重建。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 高斯溅射 动态场景重建 自动驾驶 语义分割 优先级自适应
📋 核心要点
- 现有动态3D重建方法在保真度和计算成本之间存在权衡,且未区分场景元素的重要性。
- PAGS通过引入语义优先级,指导高斯溅射的剪枝、正则化和渲染,从而优化资源分配。
- 实验表明,PAGS在保证安全关键对象重建质量的同时,显著提升了训练速度和渲染帧率。
📝 摘要(中文)
重建动态3D城市场景对于自动驾驶至关重要,但现有方法在保真度和计算成本之间面临严峻的权衡。这种低效率源于它们语义不可知的设计,该设计统一分配资源,平等对待静态背景和安全关键对象。为了解决这个问题,我们引入了优先级自适应高斯溅射(PAGS),该框架将任务感知的语义优先级直接注入到3D重建和渲染流程中。PAGS引入了两个核心贡献:(1)语义引导的剪枝和正则化策略,它采用混合重要性度量来积极简化非关键场景元素,同时保留对导航至关重要的对象的精细细节。(2)优先级驱动的渲染流程,它采用基于优先级的深度预处理来积极剔除遮挡的图元并加速最终着色计算。在Waymo和KITTI数据集上的大量实验表明,PAGS实现了卓越的重建质量,尤其是在安全关键对象上,同时显着减少了训练时间并将渲染速度提高到350 FPS以上。
🔬 方法详解
问题定义:现有动态驾驶场景的3D重建方法,如基于神经辐射场(NeRF)的方法,计算成本高昂,难以满足自动驾驶的实时性需求。同时,这些方法对场景中的所有元素一视同仁,没有区分静态背景和安全关键对象,导致资源分配不合理。
核心思路:PAGS的核心思路是引入任务感知的语义优先级,将更多的计算资源分配给对自动驾驶更重要的对象(如车辆、行人),而对静态背景进行简化。通过这种方式,可以在保证关键对象重建质量的前提下,降低整体的计算复杂度,提高重建和渲染的速度。
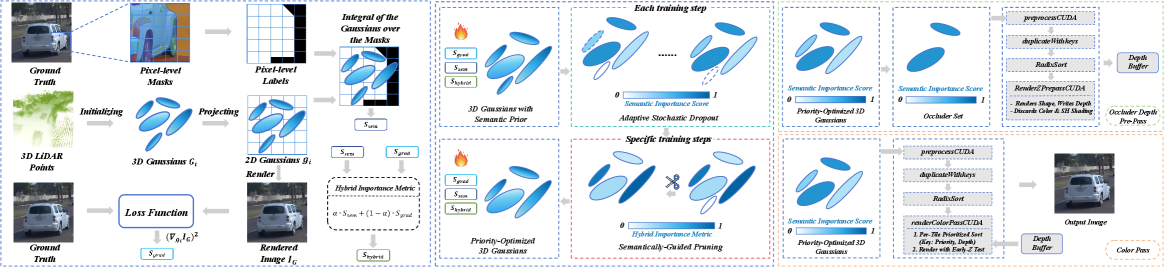
技术框架:PAGS框架包含两个主要模块:语义引导的剪枝和正则化策略,以及优先级驱动的渲染流程。首先,利用语义分割结果,为场景中的每个高斯图元赋予一个重要性权重。然后,根据这个权重进行剪枝和正则化,去除不重要的图元。在渲染阶段,采用基于优先级的深度预处理,快速剔除被遮挡的图元,从而加速最终的着色计算。
关键创新:PAGS的关键创新在于将语义信息融入到高斯溅射的重建和渲染流程中。与传统的无差别对待所有场景元素的方法不同,PAGS能够根据语义优先级自适应地分配计算资源,从而在保证关键对象重建质量的同时,显著提高效率。
关键设计:PAGS采用混合重要性度量,综合考虑语义分割的置信度和高斯图元的梯度大小,来确定每个图元的重要性权重。在渲染阶段,使用优先级队列来管理图元,并优先渲染重要的图元。损失函数中加入了正则化项,以防止过拟合,并鼓励模型学习到更紧凑的表示。
🖼️ 关键图片


📊 实验亮点
PAGS在Waymo和KITTI数据集上进行了评估,实验结果表明,PAGS在保证安全关键对象重建质量的同时,显著降低了训练时间,并将渲染速度提高到350 FPS以上。与现有方法相比,PAGS在重建精度和效率方面都取得了显著的提升。
🎯 应用场景
PAGS可应用于自动驾驶、机器人导航、增强现实等领域。在自动驾驶中,它可以用于实时重建周围环境,提高感知系统的准确性和可靠性。在机器人导航中,它可以帮助机器人更好地理解周围环境,从而做出更合理的决策。在增强现实中,它可以用于创建更逼真的虚拟场景,提升用户体验。
📄 摘要(原文)
Reconstructing dynamic 3D urban scenes is crucial for autonomous driving, yet current methods face a stark trade-off between fidelity and computational cost. This inefficiency stems from their semantically agnostic design, which allocates resources uniformly, treating static backgrounds and safety-critical objects with equal importance. To address this, we introduce Priority-Adaptive Gaussian Splatting (PAGS), a framework that injects task-aware semantic priorities directly into the 3D reconstruction and rendering pipeline. PAGS introduces two core contributions: (1) Semantically-Guided Pruning and Regularization strategy, which employs a hybrid importance metric to aggressively simplify non-critical scene elements while preserving fine-grained details on objects vital for navigation. (2) Priority-Driven Rendering pipeline, which employs a priority-based depth pre-pass to aggressively cull occluded primitives and accelerate the final shading computations. Extensive experiments on the Waymo and KITTI datasets demonstrate that PAGS achieves exceptional reconstruction quality, particularly on safety-critical objects, while significantly reducing training time and boosting rendering speeds to over 350 FPS.