Situat3DChange: Situated 3D Change Understanding Dataset for Multimodal Large Language Model
作者: Ruiping Liu, Junwei Zheng, Yufan Chen, Zirui Wang, Kunyu Peng, Kailun Yang, Jiaming Zhang, Marc Pollefeys, Rainer Stiefelhagen
分类: cs.CV
发布日期: 2025-10-13
备注: Accepted to NeurIPS 2025 Datasets and Benchmarks Track. Dataset and Code: https://github.com/RuipingL/Situat3DChange
💡 一句话要点
提出Situat3DChange数据集,用于多模态大语言模型理解情境化3D场景变化
🎯 匹配领域: 支柱六:视频提取与匹配 (Video Extraction) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 3D场景理解 多模态大语言模型 情境感知 数据集构建 点云比较
📋 核心要点
- 现有3D数据集侧重于动态场景或动态情境的孤立研究,缺乏对情境化变化的全面理解。
- 论文构建Situat3DChange数据集,并提出SCReasoner模型,促进多模态大语言模型对3D场景变化的理解。
- 实验表明,Situat3DChange数据集能有效提升MLLM在动态场景和情境理解方面的性能,并具有跨领域迁移能力。
📝 摘要(中文)
本文提出了Situat3DChange,一个大型数据集,旨在支持感知-行动模型下的三种情境感知变化理解任务。该数据集包含12.1万个问答对、3.6万个用于感知任务的变化描述以及1.7万个用于行动任务的重排指令。Situat3DChange利用了1.1万个人类对环境变化的观察,从而为人类-AI协作建立共享的心智模型和情境感知。这些观察结果通过自中心和以外中心视角以及类别和坐标空间关系进行丰富,并使用LLM进行整合,以支持对情境化变化的理解。为了解决比较同一场景中具有微小变化的点云对的挑战,本文提出了一种高效的3D MLLM方法SCReasoner,该方法能够以最小的参数开销和无需语言解码器额外token的方式实现有效的点云比较。在Situat3DChange任务上的全面评估突出了MLLM在动态场景和情境理解方面的进展和局限性。在数据缩放和跨域迁移上的额外实验证明了使用Situat3DChange作为MLLM训练数据集的任务无关有效性。
🔬 方法详解
问题定义:现有3D数据集和评估基准通常只关注动态场景或动态情境,缺乏对两者结合的情境化3D场景变化的全面理解。这限制了多模态大语言模型(MLLM)在理解和推理真实世界动态环境中的能力。现有方法难以有效比较具有微小变化的点云对,且计算成本较高。
核心思路:论文的核心思路是构建一个大规模、情境感知的3D场景变化数据集Situat3DChange,并设计一个高效的3D MLLM模型SCReasoner。通过引入人类观察数据,建立共享的心智模型和情境感知,从而提升MLLM对动态场景的理解能力。SCReasoner旨在以最小的参数开销实现有效的点云比较。
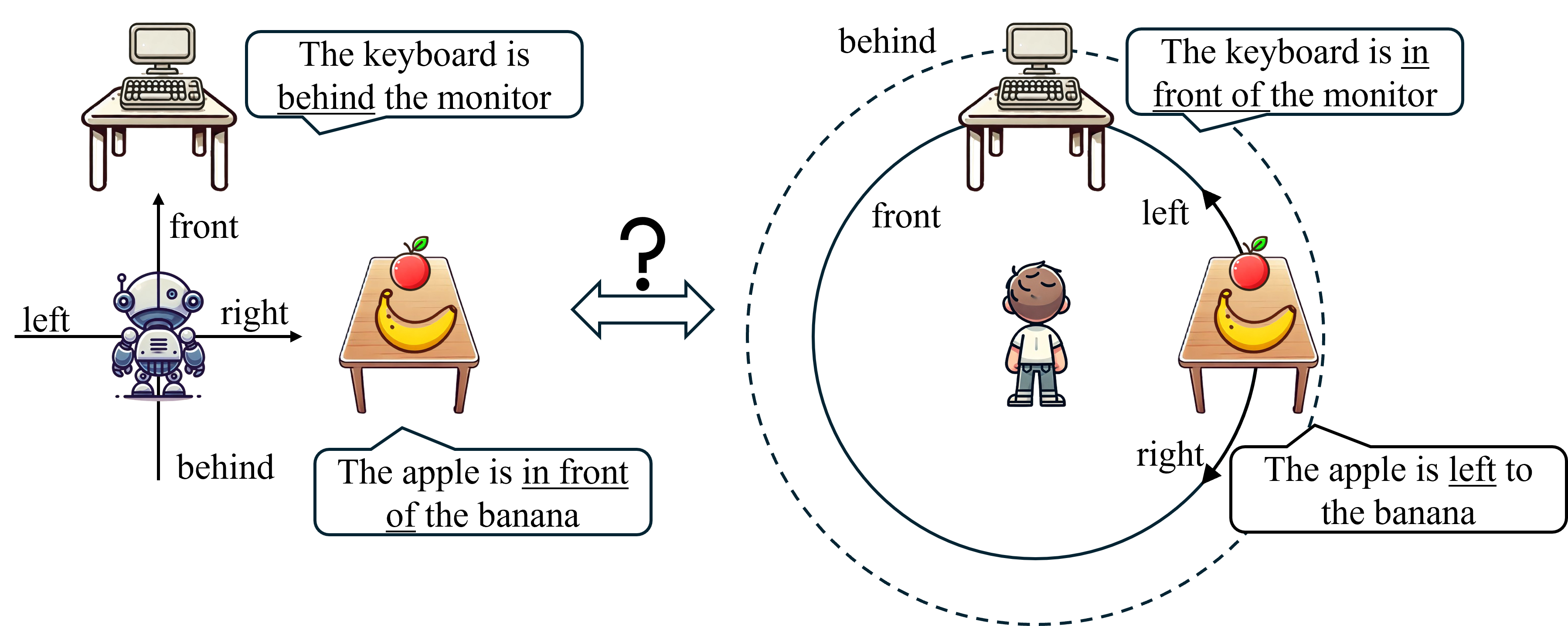
技术框架:整体框架包含数据收集、数据增强和模型构建三个主要阶段。首先,收集人类对环境变化的观察数据,并从自中心和以外中心视角进行标注,包括类别和坐标空间关系。然后,利用LLM整合这些信息,生成问答对、变化描述和重排指令,构建Situat3DChange数据集。最后,提出SCReasoner模型,用于比较点云对并进行情境推理。
关键创新:主要创新点在于:1) 构建了Situat3DChange数据集,该数据集专注于情境化的3D场景变化理解,包含多种任务类型;2) 提出了SCReasoner模型,该模型能够以最小的参数开销实现有效的点云比较,无需额外的语言解码器token。与现有方法相比,SCReasoner更高效,且更适用于处理具有微小变化的点云对。
关键设计:SCReasoner的关键设计在于其高效的点云比较机制。具体的技术细节包括:最小化参数开销的设计,避免引入额外的语言解码器token,以及针对点云数据特点优化的网络结构。论文中没有详细说明损失函数和网络结构的具体参数,这部分信息未知。
🖼️ 关键图片


📊 实验亮点
在Situat3DChange数据集上的实验表明,提出的SCReasoner模型能够有效提升MLLM在动态场景和情境理解方面的性能。论文还通过数据缩放和跨域迁移实验,验证了Situat3DChange数据集作为MLLM训练数据集的任务无关有效性。具体的性能数据和提升幅度在摘要中没有明确给出,这部分信息未知。
🎯 应用场景
该研究成果可应用于机器人导航、智能家居、自动驾驶等领域。通过让AI系统理解环境变化,可以提升其在动态环境中的适应性和决策能力。例如,机器人可以根据环境变化调整行动计划,自动驾驶系统可以更好地应对道路上的突发情况,智能家居系统可以根据用户行为和环境变化提供更个性化的服务。
📄 摘要(原文)
Physical environments and circumstances are fundamentally dynamic, yet current 3D datasets and evaluation benchmarks tend to concentrate on either dynamic scenarios or dynamic situations in isolation, resulting in incomplete comprehension. To overcome these constraints, we introduce Situat3DChange, an extensive dataset supporting three situation-aware change understanding tasks following the perception-action model: 121K question-answer pairs, 36K change descriptions for perception tasks, and 17K rearrangement instructions for the action task. To construct this large-scale dataset, Situat3DChange leverages 11K human observations of environmental changes to establish shared mental models and shared situational awareness for human-AI collaboration. These observations, enriched with egocentric and allocentric perspectives as well as categorical and coordinate spatial relations, are integrated using an LLM to support understanding of situated changes. To address the challenge of comparing pairs of point clouds from the same scene with minor changes, we propose SCReasoner, an efficient 3D MLLM approach that enables effective point cloud comparison with minimal parameter overhead and no additional tokens required for the language decoder. Comprehensive evaluation on Situat3DChange tasks highlights both the progress and limitations of MLLMs in dynamic scene and situation understanding. Additional experiments on data scaling and cross-domain transfer demonstrate the task-agnostic effectiveness of using Situat3DChange as a training dataset for MLLMs.