Guided Image Feature Matching using Feature Spatial Order
作者: Chin-Hung Teng, Ben-Jian Dong
分类: cs.CV, eess.IV
发布日期: 2025-10-12
💡 一句话要点
利用特征空间顺序引导图像特征匹配,提升匹配效率和准确性
🎯 匹配领域: 支柱六:视频提取与匹配 (Video Extraction)
关键词: 图像特征匹配 特征空间顺序 对极几何 渐进式匹配 图像对齐
📋 核心要点
- 图像特征匹配耗时,尤其是在特征点数量庞大的图像中,现有方法效率有待提升。
- 利用特征空间顺序估计特征匹配的正确概率,并将其融入渐进式匹配框架中。
- 实验结果表明,该方法在匹配效率和准确性方面均优于传统方法。
📝 摘要(中文)
图像特征匹配在许多计算机视觉任务中至关重要。尽管过去几十年提出了许多图像特征检测和匹配技术,但在两幅图像中匹配特征点仍然非常耗时,特别是对于具有大量检测到的特征的图像。特征空间顺序可以估计一对特征正确的概率。由于它是一个完全独立于对极几何的概念,因此可以用于补充对极几何,以引导目标区域中的特征匹配,从而提高匹配效率。本文将特征空间顺序的概念集成到渐进式匹配框架中。我们使用一些初始匹配的特征来构建特征空间顺序的计算模型,并利用它来计算后续特征匹配的可能空间范围,从而过滤掉不必要的特征匹配。我们还将其与对极几何相结合,以进一步提高匹配效率和准确性。由于特征点的空间顺序受图像旋转的影响,我们提出了一种合适的图像对齐方法,从对极几何的基本矩阵中消除图像旋转的影响。为了验证所提出方法的可行性,我们进行了一系列实验,包括标准基准数据集、自生成的模拟图像和真实图像。结果表明,我们提出的方法比传统方法效率更高,特征匹配更准确。
🔬 方法详解
问题定义:论文旨在解决图像特征匹配效率低下的问题,尤其是在图像包含大量特征点时。现有的特征匹配方法,即使结合对极几何约束,仍然需要大量的计算资源和时间,限制了其在实时性要求高的应用中的使用。
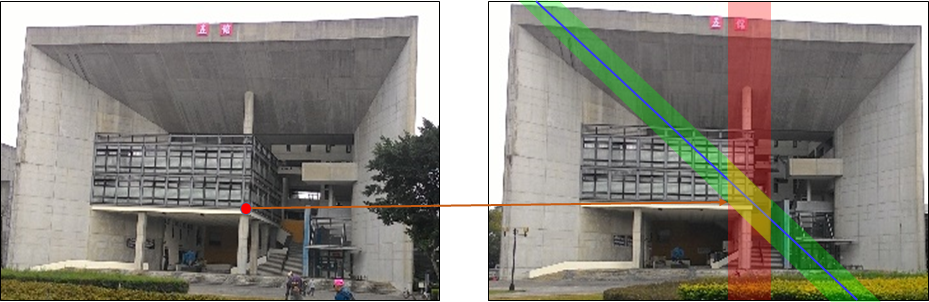
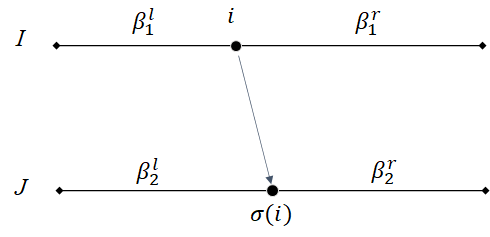
核心思路:论文的核心思路是利用特征点之间的空间顺序关系来引导特征匹配过程。通过分析已匹配特征点的空间分布,可以预测未匹配特征点可能的匹配位置,从而缩小搜索范围,减少不必要的匹配尝试。这种方法独立于对极几何,可以作为其补充,进一步提高匹配效率。
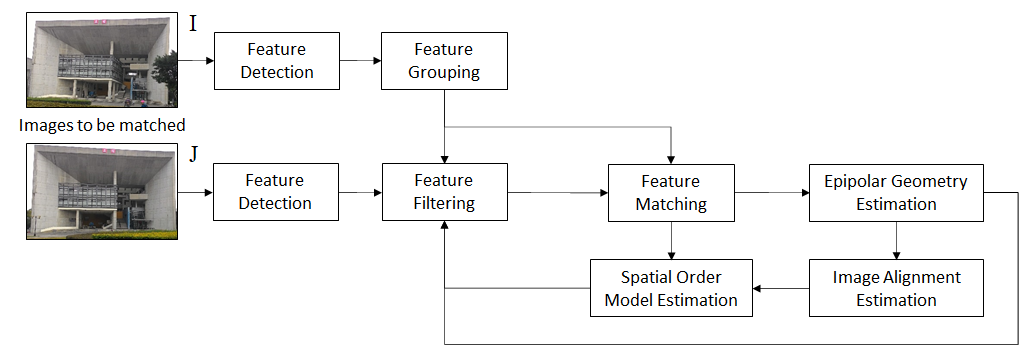
技术框架:该方法采用渐进式匹配框架。首先,使用传统方法进行初始特征匹配,得到少量可靠的匹配点。然后,利用这些初始匹配点构建特征空间顺序的计算模型。该模型用于预测后续特征点可能的匹配范围,并结合对极几何约束进行精确匹配。为了消除图像旋转的影响,论文还提出了一种基于基本矩阵的图像对齐方法。
关键创新:该方法最重要的创新点在于将特征空间顺序的概念引入到特征匹配中。与传统的仅依赖特征描述子相似性和对极几何约束的方法不同,该方法利用特征点之间的相对位置关系来提高匹配的准确性和效率。这种方法可以有效地过滤掉错误的匹配,并减少搜索空间。
关键设计:论文的关键设计包括:1) 特征空间顺序的建模方式,具体如何利用初始匹配点构建空间顺序模型,以及如何利用该模型预测后续匹配点的搜索范围;2) 如何将特征空间顺序与对极几何约束相结合,以进一步提高匹配的准确性和效率;3) 如何利用基本矩阵进行图像对齐,消除图像旋转对特征空间顺序的影响。具体的参数设置和损失函数等细节在论文中应该有更详细的描述(未知)。
🖼️ 关键图片
📊 实验亮点
论文通过在标准基准数据集、自生成的模拟图像和真实图像上进行实验,验证了所提出方法的有效性。实验结果表明,该方法在特征匹配的效率和准确性方面均优于传统方法。具体的性能提升数据(例如匹配时间减少的百分比、匹配准确率提高的百分比)需要在论文中查找(未知)。
🎯 应用场景
该研究成果可广泛应用于计算机视觉领域,例如三维重建、视觉SLAM、图像拼接、目标识别和跟踪等。通过提高特征匹配的效率和准确性,可以提升这些应用的性能和实时性,使其能够更好地应用于机器人导航、增强现实、自动驾驶等领域。未来,该方法可以进一步扩展到视频序列的特征匹配,为视频分析和理解提供更强大的支持。
📄 摘要(原文)
Image feature matching plays a vital role in many computer vision tasks. Although many image feature detection and matching techniques have been proposed over the past few decades, it is still time-consuming to match feature points in two images, especially for images with a large number of detected features. Feature spatial order can estimate the probability that a pair of features is correct. Since it is a completely independent concept from epipolar geometry, it can be used to complement epipolar geometry in guiding feature match in a target region so as to improve matching efficiency. In this paper, we integrate the concept of feature spatial order into a progressive matching framework. We use some of the initially matched features to build a computational model of feature spatial order and employs it to calculates the possible spatial range of subsequent feature matches, thus filtering out unnecessary feature matches. We also integrate it with epipolar geometry to further improve matching efficiency and accuracy. Since the spatial order of feature points is affected by image rotation, we propose a suitable image alignment method from the fundamental matrix of epipolar geometry to remove the effect of image rotation. To verify the feasibility of the proposed method, we conduct a series of experiments, including a standard benchmark dataset, self-generated simulated images, and real images. The results demonstrate that our proposed method is significantly more efficient and has more accurate feature matching than the traditional method.