Opacity-Gradient Driven Density Control for Compact and Efficient Few-Shot 3D Gaussian Splatting
作者: Abdelrhman Elrawy, Emad A. Mohammed
分类: cs.CV, cs.LG
发布日期: 2025-10-11
💡 一句话要点
提出基于不透明度梯度的密度控制方法,提升少样本3D高斯溅射的效率和紧凑性。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 3D高斯溅射 少样本学习 视图合成 密度控制 不透明度梯度
📋 核心要点
- 3D高斯溅射在少样本场景下易过拟合,重建结果冗余,现有方法虽提升质量,但图元数量显著增加。
- 论文提出基于不透明度梯度的密度控制方法,作为渲染误差的轻量级代理,配合保守剪枝策略,避免破坏性优化。
- 实验表明,该方法在保证重建质量的前提下,显著减少了图元数量,提升了效率,并在质量-效率帕累托前沿上达到新的最优。
📝 摘要(中文)
3D高斯溅射(3DGS)在少样本场景中表现不佳,其标准自适应密度控制(ADC)容易导致过拟合和重建膨胀。虽然像FSGS这样的先进方法提高了质量,但通常以显著增加图元数量为代价。本文提出了一个框架,改进了核心3DGS优化,以优先考虑效率。我们用一种新的密度化触发器取代了标准的位置梯度启发式方法,该触发器使用不透明度梯度作为渲染误差的轻量级代理。我们发现,只有当与更保守的剪枝策略相结合时,这种激进的密度化才有效,从而防止了破坏性的优化循环。结合用于几何引导的标准深度相关损失,我们的框架展示了效率的根本性改进。在3视角的LLFF数据集上,我们的模型比FSGS紧凑40%以上(32k vs. 57k个图元),在Mip-NeRF 360数据集上,实现了约70%的减少。这种在紧凑性方面的显著提升是以重建指标的适度权衡为代价实现的,从而在少样本视图合成的质量-效率帕累托前沿上建立了新的最先进水平。
🔬 方法详解
问题定义:现有的3D高斯溅射方法在少样本视图合成任务中,容易出现过拟合现象,导致重建模型过于复杂,图元数量庞大,计算效率低下。虽然一些方法尝试提高重建质量,但往往以增加图元数量为代价,无法兼顾效率和紧凑性。因此,如何在少样本情况下,高效地重建高质量的3D场景是一个关键问题。
核心思路:论文的核心思路是利用不透明度梯度作为渲染误差的轻量级代理,指导高斯图元的密度控制。不透明度梯度能够反映渲染结果的误差,通过对梯度较大的区域进行更密集的采样,可以更有效地优化场景的几何结构和外观。同时,为了防止过度密度化导致的过拟合,论文还采用了一种更保守的剪枝策略,以平衡密度化和剪枝之间的关系。
技术框架:该框架主要包含以下几个阶段:1) 初始化:初始化一组高斯图元,用于表示场景的几何结构和外观。2) 渲染:使用可微分的渲染方法,将高斯图元投影到图像平面上,生成合成图像。3) 密度控制:基于不透明度梯度,动态地调整高斯图元的密度。具体来说,对于不透明度梯度较大的区域,进行密度化操作,增加高斯图元的数量;对于不透明度梯度较小的区域,进行剪枝操作,减少高斯图元的数量。4) 优化:使用深度相关损失等约束,优化高斯图元的参数,包括位置、旋转、缩放和颜色等。
关键创新:该论文最重要的技术创新点在于提出了基于不透明度梯度的密度控制方法。与传统的基于位置梯度的密度控制方法相比,不透明度梯度能够更直接地反映渲染误差,从而更有效地指导高斯图元的密度调整。此外,论文还提出了一种更保守的剪枝策略,以平衡密度化和剪枝之间的关系,防止过度密度化导致的过拟合。
关键设计:论文的关键设计包括:1) 使用不透明度梯度作为密度化的触发条件,具体实现方式未知。2) 设计了一种更保守的剪枝策略,具体实现方式未知。3) 使用深度相关损失作为几何约束,以提高重建的几何精度。4) 具体的网络结构和参数设置未知。
🖼️ 关键图片

📊 实验亮点
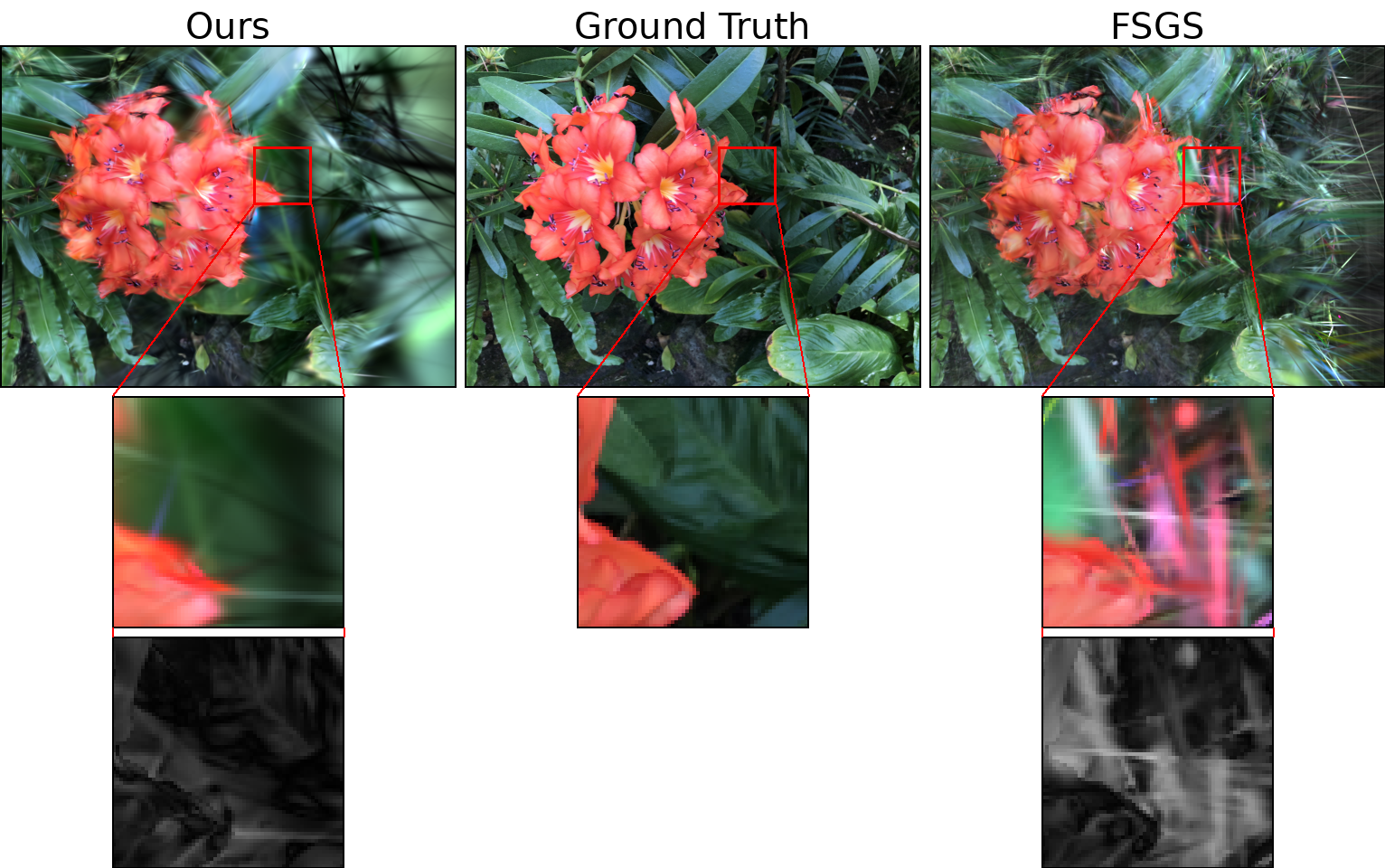
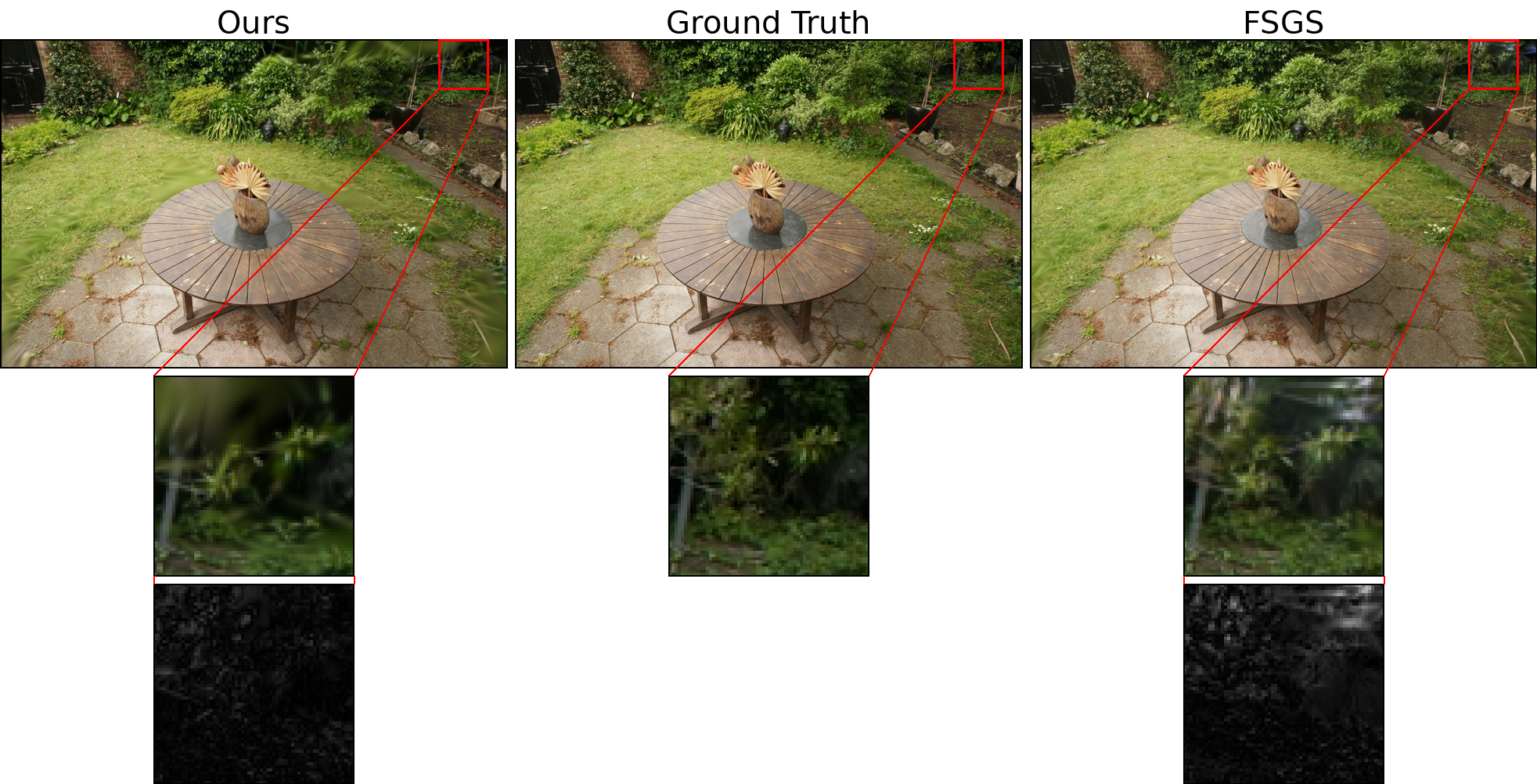
实验结果表明,在3视角的LLFF数据集上,该模型比FSGS紧凑40%以上(32k vs. 57k个图元),在Mip-NeRF 360数据集上,实现了约70%的图元数量减少。虽然在重建指标上略有下降,但整体在质量-效率帕累托前沿上取得了显著提升,确立了新的state-of-the-art。
🎯 应用场景
该研究成果可应用于各种需要高效少样本3D重建的场景,例如:移动端的增强现实(AR)应用、快速原型设计、机器人导航与场景理解、以及虚拟现实(VR)中的快速场景构建。通过减少模型大小和提高渲染效率,该方法能够降低计算成本,并提升用户体验,加速相关技术的普及。
📄 摘要(原文)
3D Gaussian Splatting (3DGS) struggles in few-shot scenarios, where its standard adaptive density control (ADC) can lead to overfitting and bloated reconstructions. While state-of-the-art methods like FSGS improve quality, they often do so by significantly increasing the primitive count. This paper presents a framework that revises the core 3DGS optimization to prioritize efficiency. We replace the standard positional gradient heuristic with a novel densification trigger that uses the opacity gradient as a lightweight proxy for rendering error. We find this aggressive densification is only effective when paired with a more conservative pruning schedule, which prevents destructive optimization cycles. Combined with a standard depth-correlation loss for geometric guidance, our framework demonstrates a fundamental improvement in efficiency. On the 3-view LLFF dataset, our model is over 40% more compact (32k vs. 57k primitives) than FSGS, and on the Mip-NeRF 360 dataset, it achieves a reduction of approximately 70%. This dramatic gain in compactness is achieved with a modest trade-off in reconstruction metrics, establishing a new state-of-the-art on the quality-vs-efficiency Pareto frontier for few-shot view synthesis.