Behavioural Classification in C. elegans: a Spatio-Temporal Analysis of Locomotion
作者: Nemanja Antonic, Monika Scholz, Aymeric Vellinger, Euphrasie Ramahefarivo, Elio Tuci
分类: q-bio.QM, cs.CV
发布日期: 2025-09-30
💡 一句话要点
提出一种基于时空分析的线虫行为自动分类方法,无需完整虫体视图。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 线虫行为分析 时空模式识别 无监督学习 行为单元提取 单点跟踪
📋 核心要点
- 现有线虫行为分析方法依赖清晰的完整虫体视图,在高密度环境下难以应用。
- 该论文提出一种无需完整虫体视图的行为单元提取方法,采用无监督自动流程。
- 实验结果表明,即使通过单点跟踪,也能有效提取线虫的时空运动模式,用于行为分类。
📝 摘要(中文)
本文提出了一种从秀丽隐杆线虫(C. elegans)运动记录中提取行为单元的方法,该方法不要求清晰的完整虫体视图。现有方法通常需要清晰的虫体图像,但在高密度环境下难以实现,而高密度环境对于理解社会环境对线虫行为的影响至关重要。该方法使用无监督自动流程定义行为单元,避免了预定义假设带来的偏差。通过将自动方法得到的结果与手动设计的行为单元进行比较来解释自动方法的输出。通过模拟线虫的运动,并测量其与自然线虫运动的匹配程度来评估该方法的有效性。结果表明,即使仅通过单点线虫跟踪,也能发现时空运动模式,并且这些模式是行为分类过程中的一个基本方面。
🔬 方法详解
问题定义:现有基于计算机的线虫行为分析方法通常需要清晰的完整虫体图像,这在诸如高密度线虫培养等场景下难以满足。高密度环境对于研究线虫的社会行为至关重要,因此,如何从不完整的线虫运动数据中提取有意义的行为信息是一个关键问题。现有方法依赖于人工设计的行为单元,容易引入主观偏差。
核心思路:该论文的核心思路是利用线虫运动的时空模式来自动识别和分类行为单元,而无需依赖完整的虫体视图。通过无监督学习方法,从线虫运动轨迹中提取特征,并聚类成不同的行为单元。这种方法避免了人工设计的行为单元带来的主观性,并能够处理不完整的虫体运动数据。
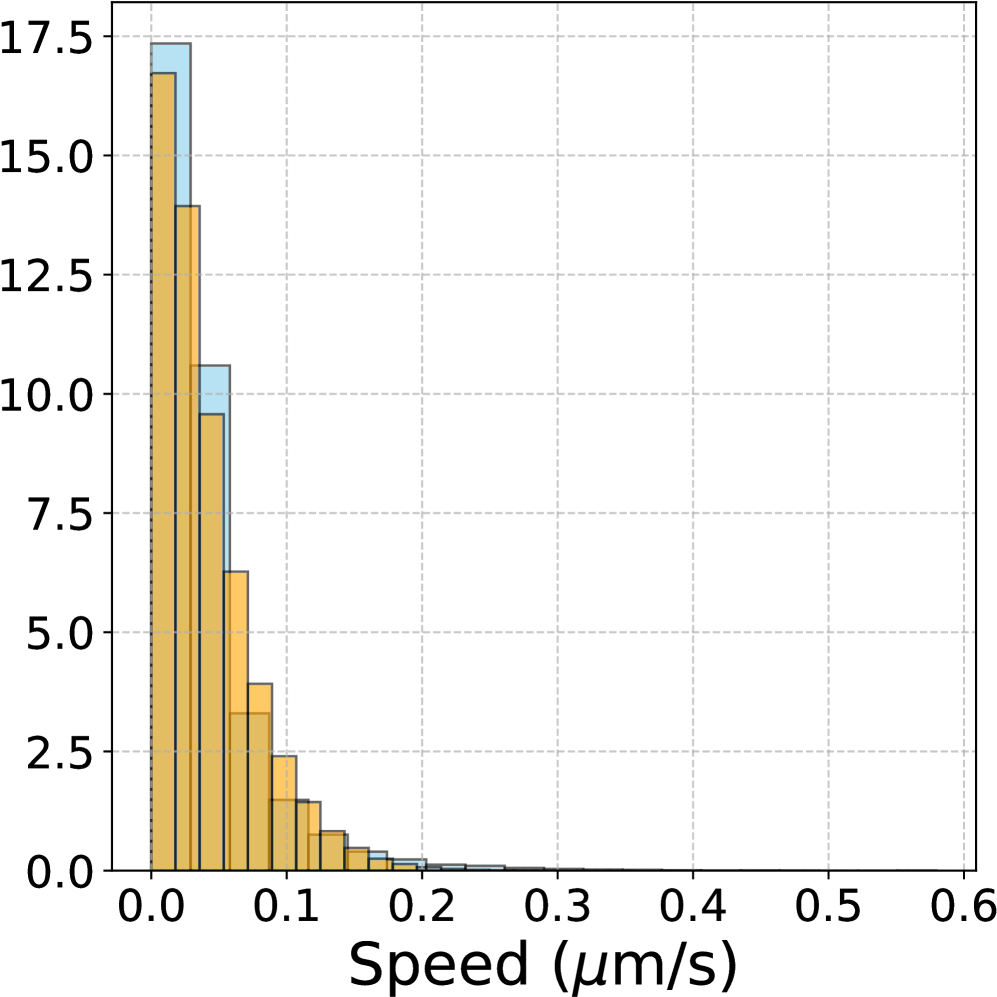
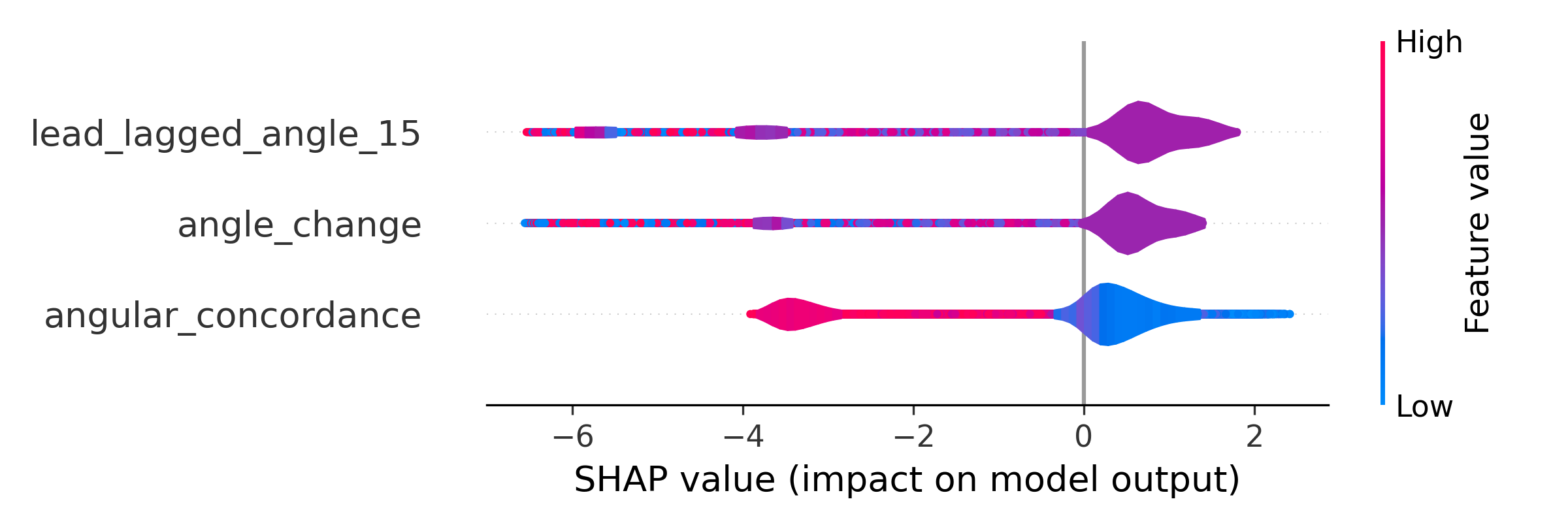
技术框架:该方法包含以下几个主要阶段:1) 线虫运动数据采集:通过视频记录线虫的运动轨迹,即使在虫体部分被遮挡的情况下也能进行跟踪。2) 特征提取:从运动轨迹中提取时空特征,例如速度、加速度、方向变化等。3) 无监督聚类:使用聚类算法(例如K-means)将提取的特征聚类成不同的行为单元。4) 行为单元解释:将自动聚类得到的行为单元与人工设计的行为单元进行比较,从而理解自动聚类结果的含义。5) 模型验证:通过模拟线虫的运动,并比较模拟结果与真实线虫运动的相似度,来评估该方法的有效性。
关键创新:该方法最重要的创新点在于它能够从不完整的线虫运动数据中自动提取行为单元,而无需依赖完整的虫体视图。此外,该方法采用无监督学习方法,避免了人工设计的行为单元带来的主观性。这种方法为在高密度环境下研究线虫的社会行为提供了新的可能性。
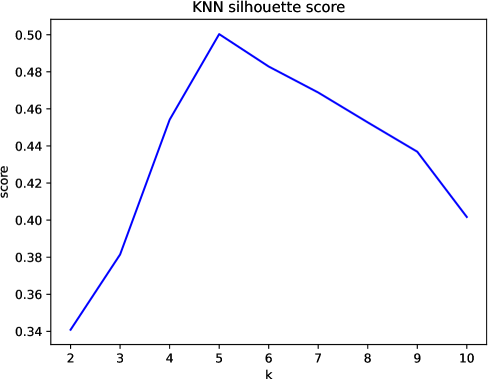
关键设计:论文中关键的设计包括:1) 使用单点跟踪技术,即使在虫体部分被遮挡的情况下也能跟踪线虫的运动轨迹。2) 提取多种时空特征,例如速度、加速度、方向变化等,以捕捉线虫运动的丰富信息。3) 使用K-means聚类算法将提取的特征聚类成不同的行为单元,并选择合适的K值。4) 通过比较自动聚类结果与人工设计的行为单元,来解释自动聚类结果的含义。
🖼️ 关键图片
📊 实验亮点
该研究表明,即使仅通过单点线虫跟踪,也能发现有意义的时空运动模式,这些模式可以用于行为分类。通过比较模拟线虫的运动与真实线虫的运动,验证了该方法的有效性。具体性能数据未知,但研究强调了该方法在处理不完整数据和避免主观偏差方面的优势。
🎯 应用场景
该研究成果可应用于高密度线虫培养环境下的行为分析,有助于理解线虫的社会行为和群体动力学。此外,该方法也可扩展到其他生物的行为分析,例如昆虫或鱼类,为生物学研究提供新的工具和视角。该方法在药物筛选和毒理学研究中也具有潜在应用价值,可以通过分析线虫的行为变化来评估药物或毒物的效果。
📄 摘要(原文)
The 1mm roundworm C. elegans is a model organism used in many sub-areas of biology to investigate different types of biological processes. In order to complement the n-vivo analysis with computer-based investigations, several methods have been proposed to simulate the worm behaviour. These methods extract discrete behavioural units from the flow of the worm movements using different types of tracking techniques. Nevertheless, these techniques require a clear view of the entire worm body, which is not always achievable. For example, this happens in high density worm conditions, which are particularly informative to understand the influence of the social context on the single worm behaviour. In this paper, we illustrate and evaluate a method to extract behavioural units from recordings of C. elegans movements which do not necessarily require a clear view of the entire worm body. Moreover, the behavioural units are defined by an unsupervised automatic pipeline which frees the process from predefined assumptions that inevitably bias the behavioural analysis. The behavioural units resulting from the automatic method are interpreted by comparing them with hand-designed behavioural units. The effectiveness of the automatic method is evaluated by measuring the extent to which the movement of a simulated worm, with an agent-based model, matches the movement of a natural worm. Our results indicate that spatio-temporal locomotory patterns emerge even from single point worm tracking. Moreover, we show that such patterns represent a fundamental aspect of the behavioural classification process.