From Fields to Splats: A Cross-Domain Survey of Real-Time Neural Scene Representations
作者: Javed Ahmad, Penggang Gao, Donatien Delehelle, Mennuti Canio, Nikhil Deshpande, Jesús Ortiz, Darwin G. Caldwell, Yonas Teodros Tefera
分类: cs.CV
发布日期: 2025-09-28
备注: 18 pages
💡 一句话要点
综述:从NeRF到3DGS,实时神经场景表示的跨领域研究
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics)
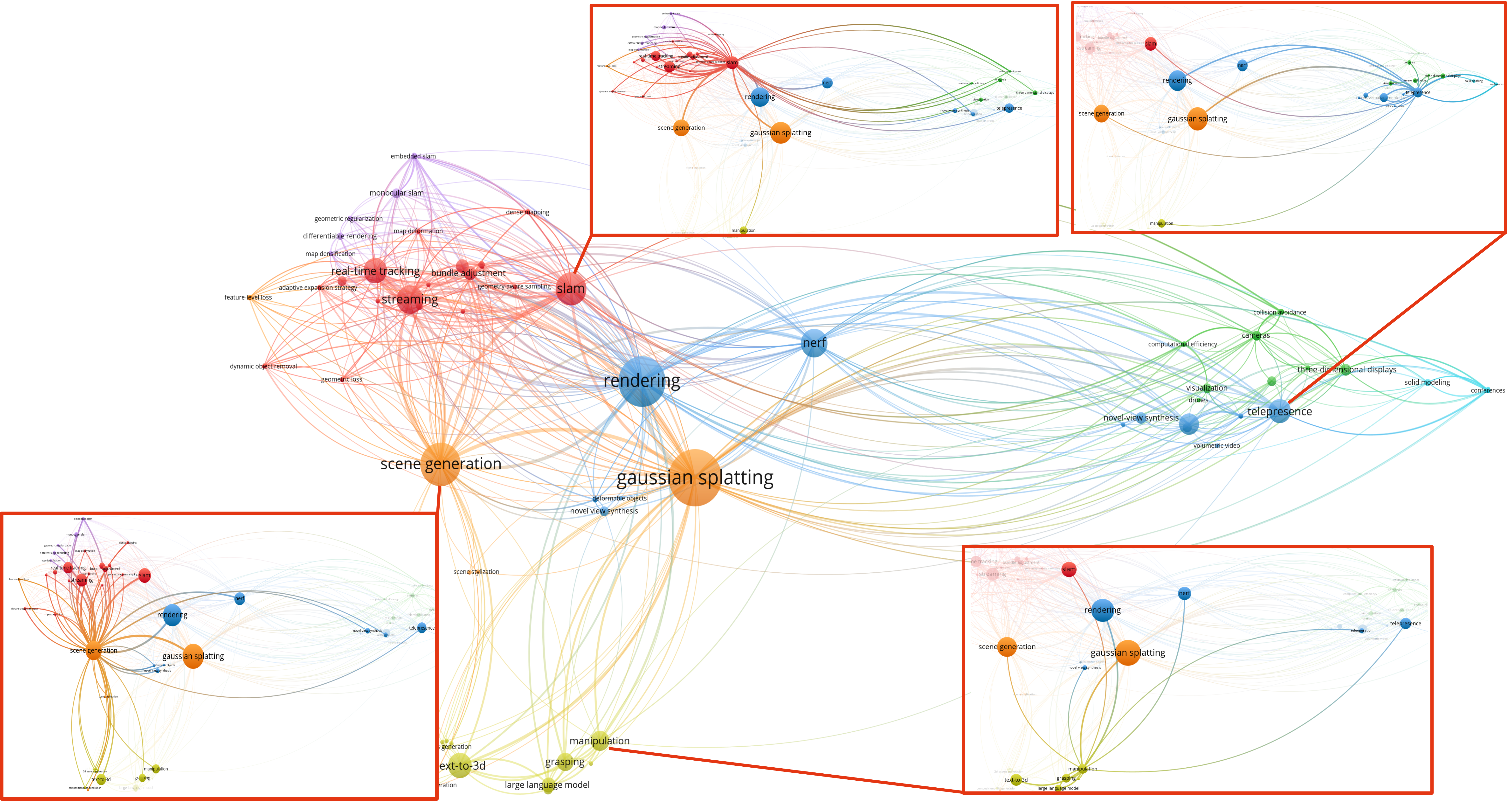
关键词: 神经场景表示 3D高斯溅射 神经辐射场 实时渲染 SLAM 机器人操作 远程呈现 3D内容生成
📋 核心要点
- NeRF虽然能实现高质量渲染,但计算成本高,优化速度慢,难以满足实时应用的需求。
- 3DGS通过显式地表示场景,优化了渲染流程,实现了更快的训练和推理速度,并保持了较高的渲染质量。
- 该综述系统地分析了3DGS在不同领域的应用,并探讨了其优势、局限性以及未来的发展方向。
📝 摘要(中文)
神经场景表示,如神经辐射场(NeRF)和3D高斯溅射(3DGS),已经改变了3D环境的建模、渲染和解释方式。NeRF通过体渲染引入了视角一致的光真实感;3DGS作为一种显式、高效的替代方案迅速崛起,支持高质量渲染、更快的优化以及集成到混合管线中,以增强光真实感和任务驱动的场景理解。本综述考察了3DGS在SLAM、远程呈现和远程操作、机器人操作和3D内容生成等领域的应用。尽管这些领域存在差异,但它们具有共同的目标:光真实感渲染、有意义的3D结构和准确的下游任务。我们围绕统一的研究问题组织综述,解释了为什么3DGS越来越多地取代基于NeRF的方法:哪些技术优势推动了它的采用?它如何适应不同的输入模态和领域特定的约束?还存在哪些局限性?通过系统地比较特定领域的管线,我们表明3DGS平衡了光真实感、几何保真度和计算效率。该综述为利用神经渲染提供了路线图,不仅用于图像合成,还用于真实和虚拟环境中的感知、交互和内容创建。
🔬 方法详解
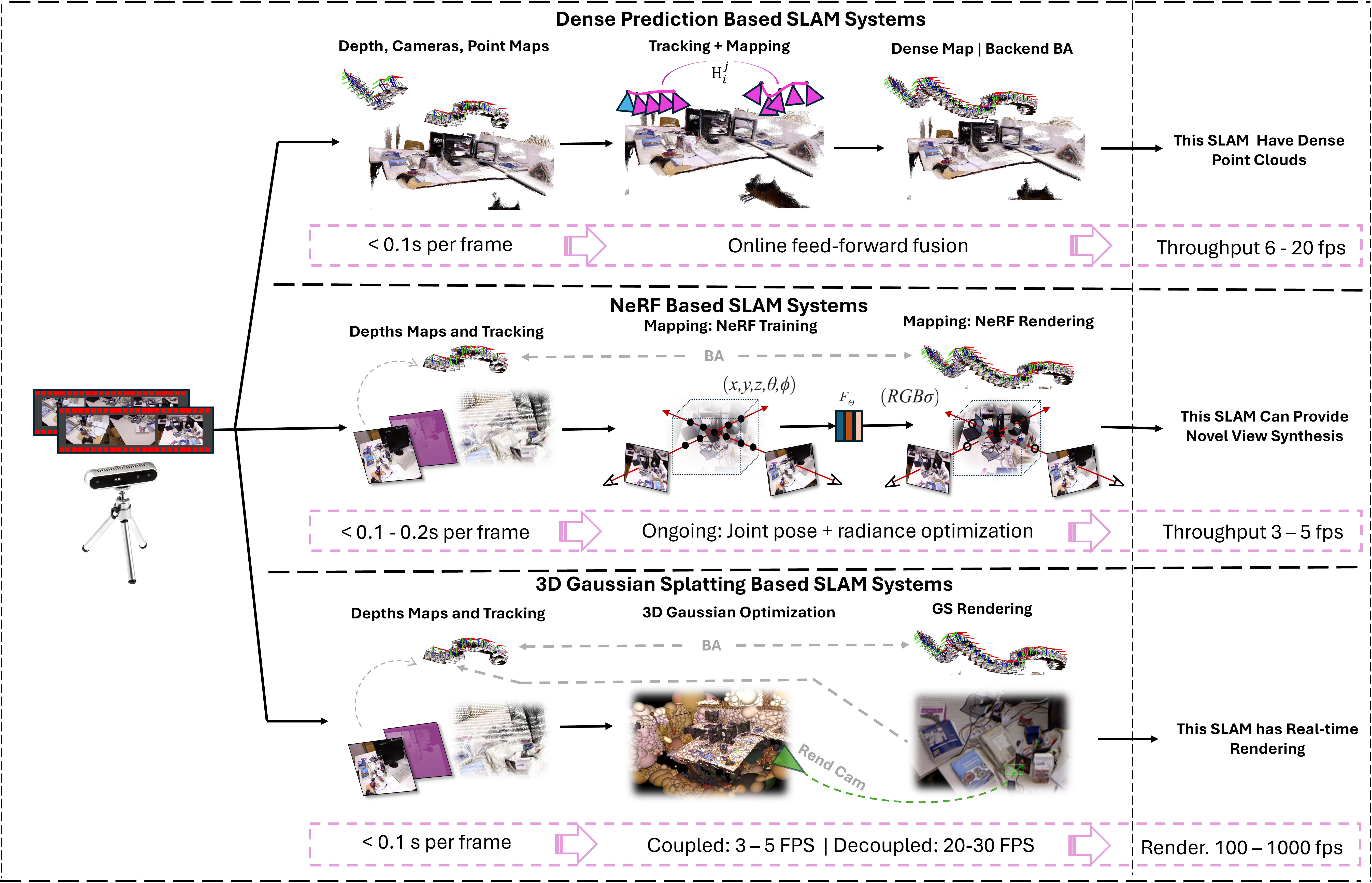
问题定义:现有神经场景表示方法,特别是NeRF,在实时渲染和快速优化方面存在瓶颈。NeRF依赖于隐式的体渲染,计算复杂度高,难以应用于需要快速反馈的场景,例如SLAM、机器人操作等。此外,NeRF在处理大规模场景时,性能会显著下降。
核心思路:论文的核心思路是分析和总结3D高斯溅射(3DGS)在不同领域的应用,并探讨其相对于NeRF的优势。3DGS使用显式的高斯分布来表示场景,从而避免了NeRF中复杂的体渲染过程,实现了更快的渲染速度和优化效率。通过对不同领域应用案例的分析,揭示3DGS在平衡光真实感、几何保真度和计算效率方面的优势。
技术框架:该综述没有提出新的技术框架,而是对现有基于3DGS的方法进行了分类和比较。主要关注以下几个方面:输入模态(如RGB图像、深度图像)、领域特定约束(如SLAM中的实时性要求、机器人操作中的精确性要求)以及下游任务(如场景理解、目标检测)。通过分析不同领域的应用案例,总结了3DGS的通用性和适应性。
关键创新:该综述的关键创新在于对3DGS在不同领域的应用进行了系统性的总结和分析,并指出了其相对于NeRF的优势和局限性。通过对比不同领域的应用案例,揭示了3DGS在平衡光真实感、几何保真度和计算效率方面的潜力。该综述为研究人员提供了一个全面的视角,帮助他们更好地理解和应用3DGS。
关键设计:该综述没有涉及具体的技术细节,而是侧重于对现有方法的分析和比较。但是,文章提到了3DGS的一些关键技术,例如:使用高斯分布来表示场景、使用可微分的渲染方程进行优化、以及使用自适应密度控制来优化场景结构。这些技术细节是3DGS实现高效渲染和优化的关键。
🖼️ 关键图片

📊 实验亮点
该综述强调了3DGS在光真实感、几何保真度和计算效率之间的平衡。通过对比不同领域的应用案例,展示了3DGS相对于NeRF的优势。例如,在SLAM领域,3DGS能够实现更快的地图构建速度和更高的定位精度;在机器人操作领域,3DGS能够提供更准确的场景表示,从而提高机器人的操作性能。
🎯 应用场景
该研究对SLAM、远程呈现、机器人操作和3D内容生成等领域具有广泛的应用前景。3DGS能够实现更快的渲染速度和优化效率,从而支持实时交互和快速原型设计。此外,3DGS还可以用于创建更逼真的虚拟环境,并为机器人提供更准确的场景理解能力。
📄 摘要(原文)
Neural scene representations such as Neural Radiance Fields (NeRF) and 3D Gaussian Splatting (3DGS) have transformed how 3D environments are modeled, rendered, and interpreted. NeRF introduced view-consistent photorealism via volumetric rendering; 3DGS has rapidly emerged as an explicit, efficient alternative that supports high-quality rendering, faster optimization, and integration into hybrid pipelines for enhanced photorealism and task-driven scene understanding. This survey examines how 3DGS is being adopted across SLAM, telepresence and teleoperation, robotic manipulation, and 3D content generation. Despite their differences, these domains share common goals: photorealistic rendering, meaningful 3D structure, and accurate downstream tasks. We organize the review around unified research questions that explain why 3DGS is increasingly displacing NeRF-based approaches: What technical advantages drive its adoption? How does it adapt to different input modalities and domain-specific constraints? What limitations remain? By systematically comparing domain-specific pipelines, we show that 3DGS balances photorealism, geometric fidelity, and computational efficiency. The survey offers a roadmap for leveraging neural rendering not only for image synthesis but also for perception, interaction, and content creation across real and virtual environments.