UnLoc: Leveraging Depth Uncertainties for Floorplan Localization
作者: Matthias Wüest, Francis Engelmann, Ondrej Miksik, Marc Pollefeys, Daniel Barath
分类: cs.CV
发布日期: 2025-09-14
💡 一句话要点
UnLoc:利用深度不确定性进行室内平面图定位
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 平面图定位 深度不确定性 单目深度估计 概率模型 机器人导航
📋 核心要点
- 现有基于平面图的定位方法缺乏对深度预测不确定性的建模,限制了其鲁棒性。
- UnLoc通过引入概率模型,将深度预测建模为概率分布,显式地考虑了不确定性。
- 实验表明,UnLoc在真实和合成数据集上显著优于现有方法,尤其在长序列定位上提升明显。
📝 摘要(中文)
我们提出了UnLoc,一种高效的数据驱动解决方案,用于在平面图中进行连续相机定位。平面图数据易于获取,具有长期持久性,并且对视觉外观的变化具有鲁棒性。我们解决了现有方法的关键局限性,例如深度预测中缺乏不确定性建模,以及需要为每个环境训练定制深度网络。我们引入了一种新颖的概率模型,该模型结合了不确定性估计,将深度预测建模为显式的概率分布。通过利用现成的预训练单目深度模型,我们消除了对每个环境训练深度网络的依赖,从而增强了对未见空间的泛化能力。我们在大规模合成和真实世界数据集上评估了UnLoc,证明了其在准确性和鲁棒性方面优于现有方法。值得注意的是,在具有挑战性的LaMAR HGE数据集上,我们在长序列(100帧)上的定位召回率比现有技术提高了2.7倍,在短序列(15帧)上提高了16.7倍。
🔬 方法详解
问题定义:论文旨在解决在已知平面图的情况下,如何利用单目相机图像序列进行精确定位的问题。现有方法通常依赖于深度预测,但忽略了深度预测本身的不确定性,导致定位精度受限,尤其是在深度估计不准确的区域。此外,一些方法需要针对特定环境训练深度网络,泛化能力较差。
核心思路:UnLoc的核心思路是将深度预测视为一个概率分布,而不是一个确定值。通过对深度不确定性进行建模,可以更有效地利用深度信息进行定位,并提高对深度估计误差的鲁棒性。同时,UnLoc利用预训练的单目深度模型,避免了针对每个环境进行训练,提高了泛化能力。
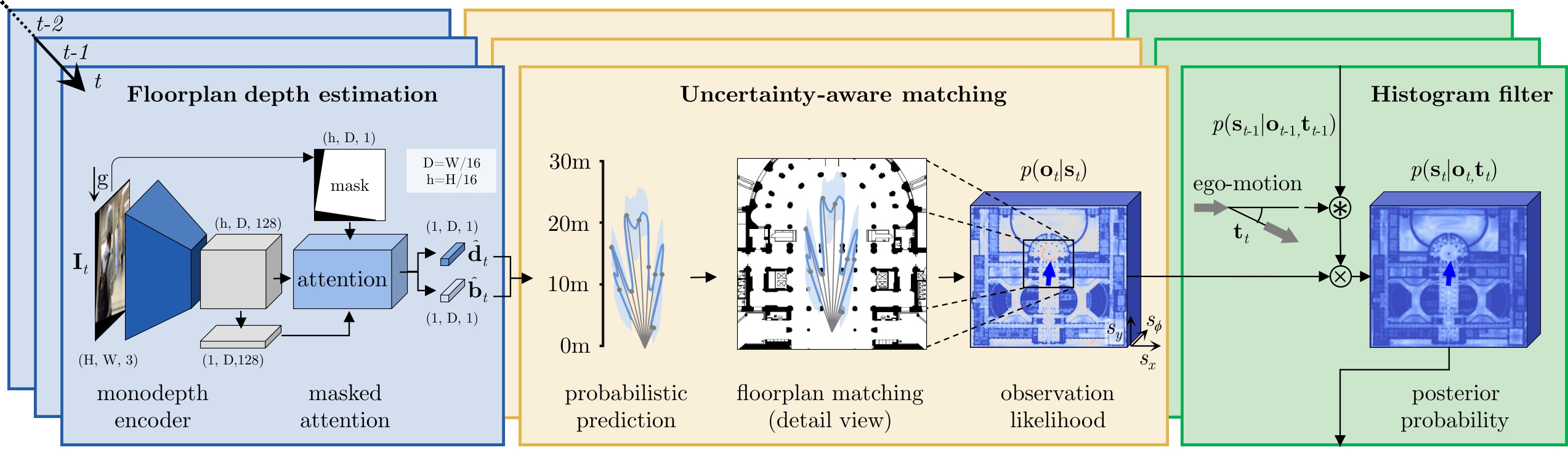
技术框架:UnLoc的整体框架包括以下几个主要步骤:1) 使用预训练的单目深度模型预测图像的深度图,并估计深度不确定性;2) 将深度预测建模为概率分布,例如高斯分布;3) 利用平面图信息和深度概率分布,构建一个概率模型,用于估计相机位姿;4) 使用序列优化方法,例如卡尔曼滤波或图优化,对相机位姿进行优化,得到最终的定位结果。
关键创新:UnLoc最重要的技术创新点在于对深度不确定性的建模。通过将深度预测建模为概率分布,UnLoc可以更好地处理深度估计误差,并提高定位的鲁棒性。此外,UnLoc利用预训练的单目深度模型,避免了针对每个环境进行训练,提高了泛化能力。
关键设计:UnLoc的关键设计包括:1) 使用预训练的单目深度模型(例如DPT)进行深度预测;2) 使用深度预测的方差作为不确定性估计;3) 将深度预测建模为高斯分布,其中均值为深度预测值,方差为不确定性估计;4) 使用概率模型(例如贝叶斯滤波器)进行相机位姿估计;5) 使用图优化方法对相机位姿进行优化,并考虑时间一致性约束。
🖼️ 关键图片

📊 实验亮点
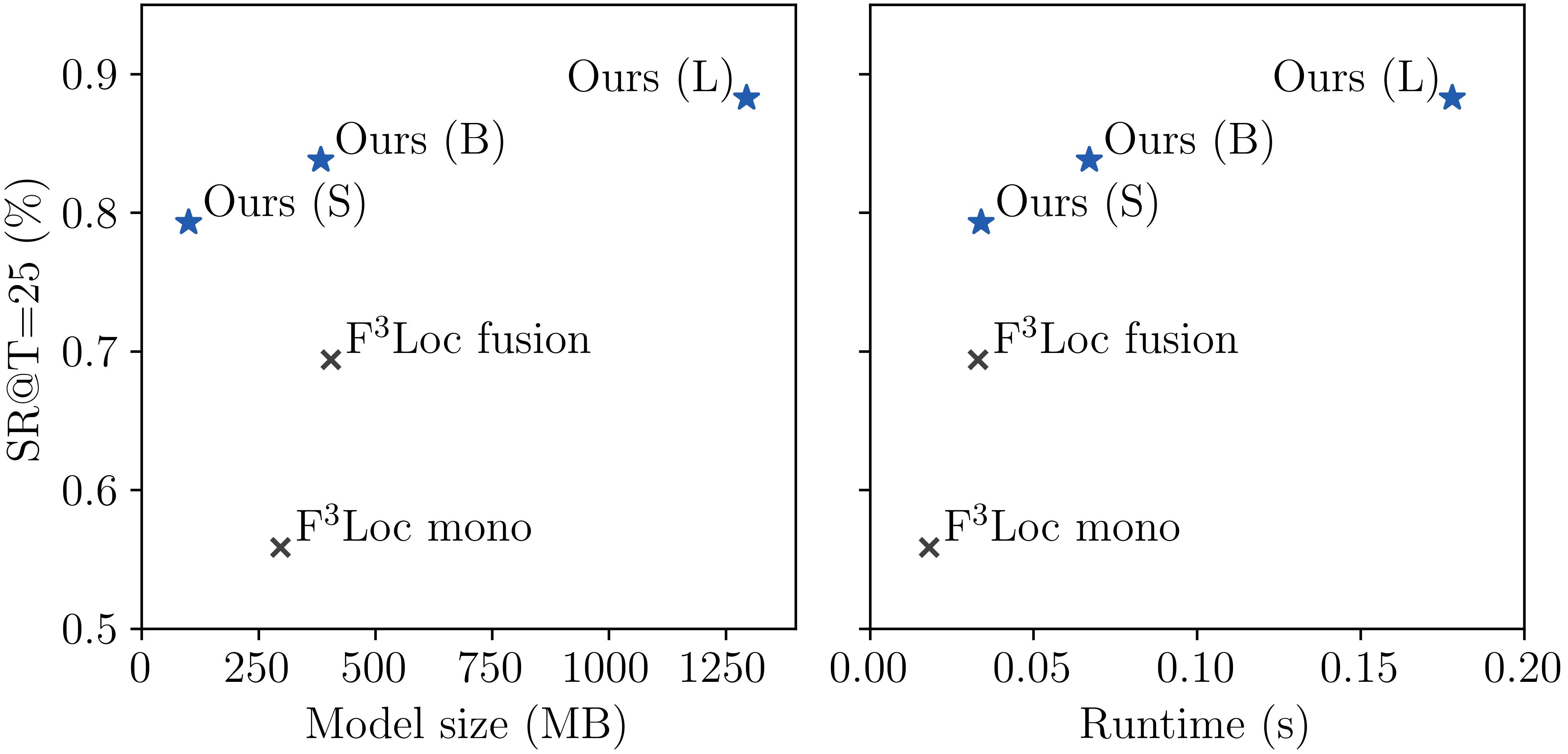
UnLoc在LaMAR HGE数据集上取得了显著的性能提升。在长序列(100帧)上,UnLoc的定位召回率比现有技术提高了2.7倍;在短序列(15帧)上,UnLoc的定位召回率比现有技术提高了16.7倍。这些结果表明,UnLoc在准确性和鲁棒性方面都优于现有方法,尤其是在深度估计不准确的情况下。
🎯 应用场景
UnLoc在室内机器人导航、增强现实、虚拟现实等领域具有广泛的应用前景。它可以帮助机器人在已知平面图的环境中进行自主导航,为用户提供更精确的定位服务,并增强AR/VR应用的沉浸感。该研究的成果可以促进相关技术的发展,并为未来的智能家居、智能办公等场景提供更可靠的定位解决方案。
📄 摘要(原文)
We propose UnLoc, an efficient data-driven solution for sequential camera localization within floorplans. Floorplan data is readily available, long-term persistent, and robust to changes in visual appearance. We address key limitations of recent methods, such as the lack of uncertainty modeling in depth predictions and the necessity for custom depth networks trained for each environment. We introduce a novel probabilistic model that incorporates uncertainty estimation, modeling depth predictions as explicit probability distributions. By leveraging off-the-shelf pre-trained monocular depth models, we eliminate the need to rely on per-environment-trained depth networks, enhancing generalization to unseen spaces. We evaluate UnLoc on large-scale synthetic and real-world datasets, demonstrating significant improvements over existing methods in terms of accuracy and robustness. Notably, we achieve $2.7$ times higher localization recall on long sequences (100 frames) and $16.7$ times higher on short ones (15 frames) than the state of the art on the challenging LaMAR HGE dataset.