On the Geometric Accuracy of Implicit and Primitive-based Representations Derived from View Rendering Constraints
作者: Elias De Smijter, Renaud Detry, Christophe De Vleeschouwer
分类: cs.CV
发布日期: 2025-09-12 (更新: 2025-09-15)
备注: 9 pages, 3 figures, to be presented at ASTRA25,
💡 一句话要点
对比隐式与显式新视角合成方法在空间机器人三维重建中的几何精度
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 新视角合成 三维重建 几何精度 空间机器人 高斯溅射 凸溅射 外观嵌入 SPEED+数据集
📋 核心要点
- 现有新视角合成方法在空间机器人三维重建中,几何精度不足,限制了其应用。
- 论文对比隐式和显式方法,评估外观嵌入对几何精度的影响,着重分析其作用。
- 实验表明,外观嵌入主要减少显式方法图元数量,凸溅射更紧凑,利于安全应用。
📝 摘要(中文)
本文首次系统性地比较了隐式和显式新视角合成方法在空间三维物体重建中的几何精度,并评估了外观嵌入的作用。虽然嵌入通过建模光照变化提高了光度保真度,但我们表明它们并没有转化为有意义的几何精度提升,而几何精度是空间机器人应用的关键要求。使用SPEED+数据集,我们比较了K-Planes、Gaussian Splatting和Convex Splatting,并证明嵌入主要减少了显式方法所需的图元数量,而不是增强了几何保真度。此外,凸溅射比高斯溅射实现了更紧凑和无杂波的表示,为交互和避碰等安全关键应用提供了优势。我们的研究结果阐明了外观嵌入在以几何为中心任务中的局限性,并强调了空间场景中重建质量和表示效率之间的权衡。
🔬 方法详解
问题定义:论文旨在解决空间机器人应用中,基于新视角合成进行三维物体重建时,如何提升几何精度的问题。现有方法虽然在光度保真度上有所提升,但几何精度仍然不足,无法满足空间机器人对交互和避碰等安全关键任务的需求。此外,现有方法在表示效率方面也存在问题,例如高斯溅射可能产生杂乱的表示。
核心思路:论文的核心思路是通过系统性地比较隐式和显式新视角合成方法,并评估外观嵌入对几何精度的影响,从而找到在空间场景下,既能保证几何精度,又能实现高效表示的方法。论文认为,虽然外观嵌入可以提高光度保真度,但其对几何精度的提升有限,因此需要探索其他方法来提高几何精度。
技术框架:论文的技术框架主要包括以下几个部分:1)选择具有代表性的隐式方法(K-Planes)和显式方法(Gaussian Splatting和Convex Splatting);2)使用SPEED+数据集进行实验,该数据集专门为空间应用设计;3)评估不同方法在几何精度和表示效率方面的性能;4)分析外观嵌入对几何精度的影响。
关键创新:论文的关键创新在于首次系统性地比较了隐式和显式新视角合成方法在空间三维物体重建中的几何精度,并揭示了外观嵌入对几何精度的影响。论文还提出了使用凸溅射来实现更紧凑和无杂波的表示,这对于安全关键应用具有重要意义。
关键设计:论文的关键设计包括:1)选择K-Planes作为隐式方法的代表,因为它具有良好的性能和可解释性;2)选择Gaussian Splatting和Convex Splatting作为显式方法的代表,因为它们在表示效率和渲染质量方面具有优势;3)使用SPEED+数据集进行实验,该数据集包含真实的空间场景数据,可以更好地评估方法在实际应用中的性能;4)使用合适的指标来评估几何精度和表示效率,例如Chamfer Distance和图元数量。
🖼️ 关键图片

📊 实验亮点
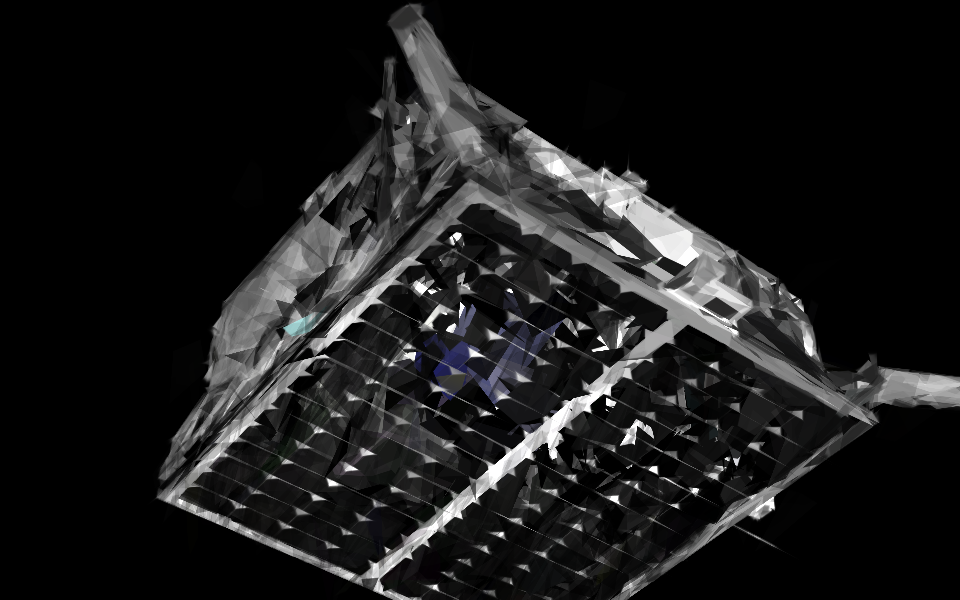
实验结果表明,外观嵌入主要减少了显式方法所需的图元数量,而不是增强了几何保真度。Convex Splatting比Gaussian Splatting实现了更紧凑和无杂波的表示,这对于安全关键应用具有重要意义。在SPEED+数据集上,Convex Splatting在保证几何精度的前提下,显著降低了图元数量。
🎯 应用场景
该研究成果可应用于空间机器人、卫星维护、行星探测等领域。通过提高三维重建的几何精度和表示效率,可以提升空间机器人在复杂环境中的感知能力,从而实现更安全、更高效的交互和避碰。未来,该研究还可以扩展到其他安全关键领域,如自动驾驶、医疗机器人等。
📄 摘要(原文)
We present the first systematic comparison of implicit and explicit Novel View Synthesis methods for space-based 3D object reconstruction, evaluating the role of appearance embeddings. While embeddings improve photometric fidelity by modeling lighting variation, we show they do not translate into meaningful gains in geometric accuracy - a critical requirement for space robotics applications. Using the SPEED+ dataset, we compare K-Planes, Gaussian Splatting, and Convex Splatting, and demonstrate that embeddings primarily reduce the number of primitives needed for explicit methods rather than enhancing geometric fidelity. Moreover, convex splatting achieves more compact and clutter-free representations than Gaussian splatting, offering advantages for safety-critical applications such as interaction and collision avoidance. Our findings clarify the limits of appearance embeddings for geometry-centric tasks and highlight trade-offs between reconstruction quality and representation efficiency in space scenarios.