Reliable Multi-view 3D Reconstruction for `Just-in-time' Edge Environments
作者: Md. Nurul Absur, Abhinav Kumar, Swastik Brahma, Saptarshi Debroy
分类: cs.CV, cs.DC
发布日期: 2025-08-21
备注: 11 Pages, 7 Figures
💡 一句话要点
针对即时边缘环境,提出基于投资组合理论的多视角3D重建方法,提升系统在时空扰动下的可靠性。
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 多视角3D重建 边缘计算 投资组合理论 资源管理 可靠性 时空扰动 遗传算法
📋 核心要点
- 现有边缘计算环境下的多视角3D重建易受时空扰动影响,导致相机操作中断和重建质量下降。
- 提出一种基于投资组合理论的边缘资源管理策略,通过优化相机选择,保证在系统扰动下的重建质量。
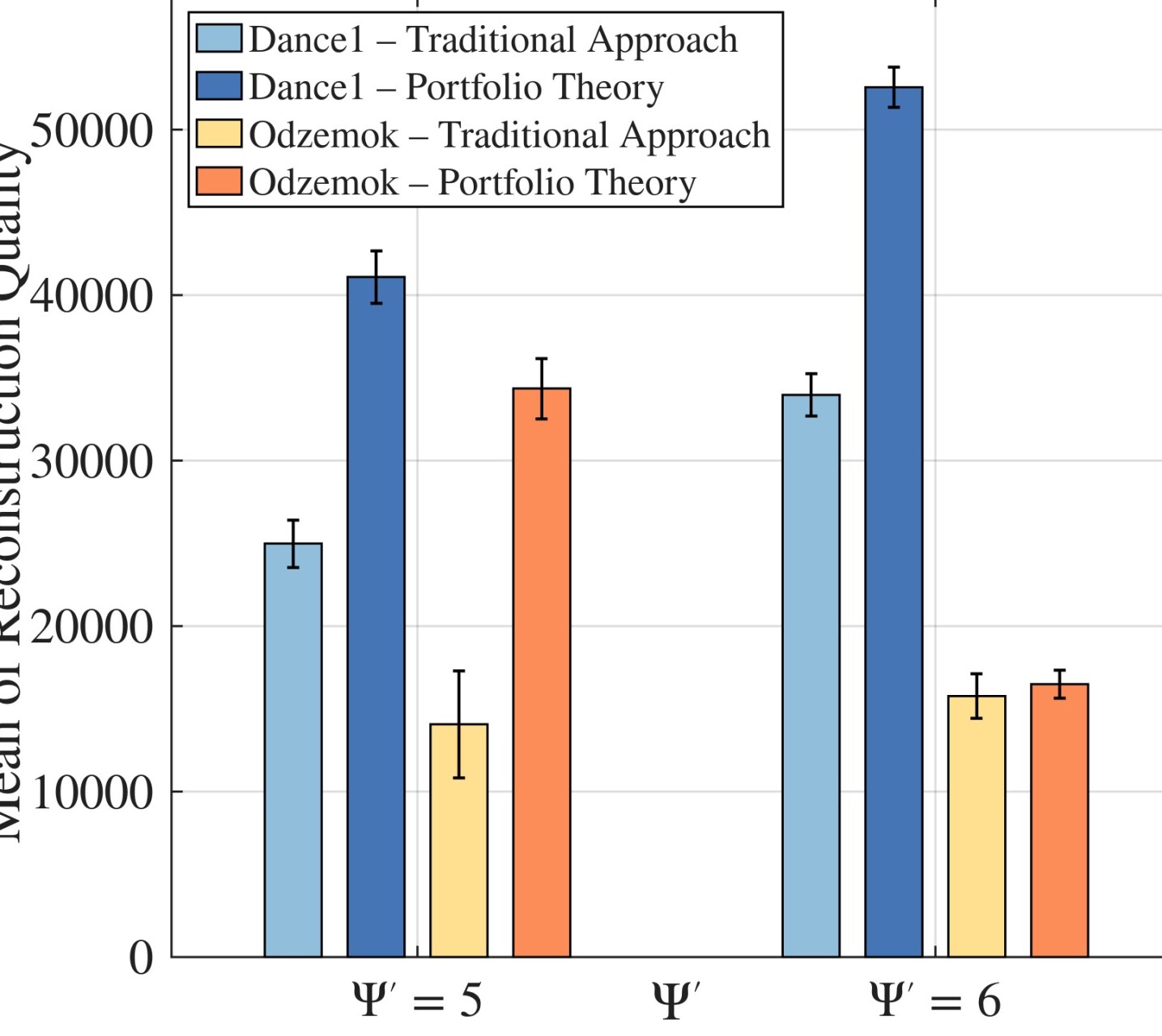
- 实验结果表明,该策略在时空扰动下,相较于传统基线策略,能更可靠地保证3D重建质量。
📝 摘要(中文)
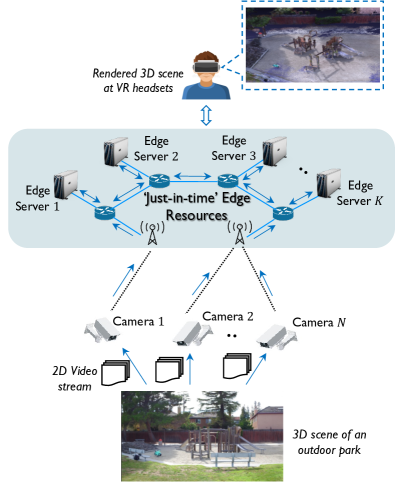
多视角3D重建应用正在彻底改变需要快速态势感知的关键用例,例如应急响应、战术场景和公共安全。在许多情况下,它们对近实时延迟的要求和对计算资源的临时需求,需要采用“即时”边缘环境,即在任务期间动态设置系统以支持应用程序。然而,可靠性问题可能源于这种边缘环境固有的动态性和操作逆境,导致时空相关的中断,影响相机操作,从而导致重建质量的持续下降。本文提出了一种受投资组合理论启发的边缘资源管理策略,用于在可能的系统中断下实现可靠的多视角3D重建。所提出的方法可以保证重建质量的满足,即使相机容易受到时空相关的中断。使用遗传算法解决投资组合理论优化问题,该算法可以针对实际系统设置快速收敛。使用公开可用的和定制的3D数据集,我们证明了所提出的相机选择策略在保证针对时空扰动的可靠3D重建方面的优势,优于传统的基线策略。
🔬 方法详解
问题定义:在“即时”边缘计算环境中,多视角3D重建系统面临着动态性和操作逆境带来的挑战,这些挑战会导致相机操作的时空相关中断,进而严重影响重建质量。现有方法缺乏针对此类扰动的有效应对机制,无法保证重建的可靠性。
核心思路:借鉴投资组合理论,将相机选择视为资源分配问题,旨在选择一组相机,使得在面临潜在系统中断时,重建质量的“风险调整后收益”最大化。核心思想是通过优化相机组合,降低系统对单个或少数几个相机故障的敏感性,从而提高整体重建的鲁棒性。
技术框架:该方法包含以下主要阶段:1) 系统建模,描述相机之间的空间关系和潜在的时空扰动模式;2) 定义基于投资组合理论的优化目标,该目标平衡了重建质量(收益)和对扰动的敏感性(风险);3) 使用遗传算法求解优化问题,得到最优的相机选择方案;4) 利用选定的相机进行3D重建。
关键创新:该方法的核心创新在于将投资组合理论应用于多视角3D重建的相机选择问题。与传统方法不同,该方法不仅考虑了相机的个体性能,还考虑了相机之间的相关性和系统整体的鲁棒性。通过优化相机组合,实现了在存在时空扰动下的可靠重建。
关键设计:优化目标函数的设计是关键。该函数通常包含两部分:一部分衡量重建质量,例如重建精度或完整性;另一部分衡量对扰动的敏感性,例如相机故障对重建质量的影响。遗传算法的参数设置,如种群大小、交叉概率和变异概率,也会影响算法的收敛速度和最终结果。
🖼️ 关键图片

📊 实验亮点
论文通过公开数据集和定制数据集验证了所提出方法的有效性。实验结果表明,在存在时空扰动的情况下,该方法能够显著提高3D重建的可靠性,优于传统的基线策略。具体性能提升数据未知,但强调了在各种扰动场景下的鲁棒性优势。
🎯 应用场景
该研究成果可应用于应急响应、战术场景和公共安全等领域,在这些场景中,快速和可靠的3D重建至关重要。例如,在灾难现场,可以利用无人机搭载的相机进行快速建模,为救援人员提供实时态势感知。该方法还可用于机器人导航、自动驾驶等领域,提高系统在复杂环境中的鲁棒性。
📄 摘要(原文)
Multi-view 3D reconstruction applications are revolutionizing critical use cases that require rapid situational-awareness, such as emergency response, tactical scenarios, and public safety. In many cases, their near-real-time latency requirements and ad-hoc needs for compute resources necessitate adoption of `Just-in-time' edge environments where the system is set up on the fly to support the applications during the mission lifetime. However, reliability issues can arise from the inherent dynamism and operational adversities of such edge environments, resulting in spatiotemporally correlated disruptions that impact the camera operations, which can lead to sustained degradation of reconstruction quality. In this paper, we propose a novel portfolio theory inspired edge resource management strategy for reliable multi-view 3D reconstruction against possible system disruptions. Our proposed methodology can guarantee reconstruction quality satisfaction even when the cameras are prone to spatiotemporally correlated disruptions. The portfolio theoretic optimization problem is solved using a genetic algorithm that converges quickly for realistic system settings. Using publicly available and customized 3D datasets, we demonstrate the proposed camera selection strategy's benefits in guaranteeing reliable 3D reconstruction against traditional baseline strategies, under spatiotemporal disruptions.