Half-Physics: Enabling Kinematic 3D Human Model with Physical Interactions
作者: Li Siyao, Yao Feng, Omid Taheri, Chen Change Loy, Michael J. Black
分类: cs.CV
发布日期: 2025-07-31 (更新: 2025-08-12)
💡 一句话要点
提出Half-Physics机制,实现SMPL-X模型与环境的物理交互
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱四:生成式动作 (Generative Motion) 支柱六:视频提取与匹配 (Video Extraction)
关键词: 3D人体模型 物理交互 运动学控制 物理模拟 SMPL-X
📋 核心要点
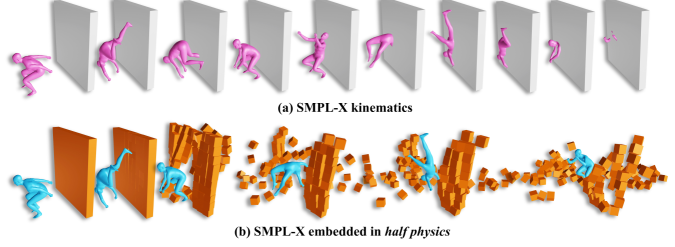
- 现有的3D人体模型缺乏与环境的物理交互能力,导致交互不真实,存在穿透等问题。
- 论文提出“半物理”机制,将运动学运动转化为物理模拟,实现人体与环境的物理交互。
- 该方法无需训练,可泛化到不同体型和运动,并能实时运行,同时保持运动保真度。
📝 摘要(中文)
当前通用的3D人体模型(如SMPL-X)能够有效地表示精确的人体形状和姿势,但由于其运动学特性,缺乏与环境进行物理交互的能力。这导致基于运动学的交互模型经常出现诸如相互穿透和不真实的物体动力学等问题。为了解决这一局限性,我们提出了一种新颖的方法,将SMPL-X嵌入到一个能够与其周围环境进行动态物理交互的有形实体中。具体来说,我们提出了一种“半物理”机制,将3D运动学运动转换为物理模拟。我们的方法保持了对SMPL-X姿势的运动学控制,同时确保与场景和物体进行物理上合理的交互,有效地消除了穿透和不真实的物体动力学。与基于强化学习的方法不同,我们的半物理方法无需学习,可以推广到任何体型和运动,同时可以实时运行。此外,它在无缝集成物理交互的同时,保留了原始运动学运动的保真度。
🔬 方法详解
问题定义:现有基于运动学的3D人体模型(如SMPL-X)无法与环境进行真实的物理交互,导致在模拟人与物体交互时出现穿透、物体运动不自然等问题。这些问题限制了3D人体模型在虚拟现实、机器人等领域的应用。
核心思路:论文的核心思路是将3D人体模型的运动学控制与物理模拟相结合,提出一种“半物理”机制。该机制允许模型在保持自身运动学特性的同时,能够与环境进行物理上合理的交互,从而避免穿透和不真实的物体动力学。这种设计旨在弥合运动学模型和物理引擎之间的差距。
技术框架:该方法主要包含以下几个阶段:1) 输入SMPL-X模型的运动学姿势;2) 将运动学姿势转化为物理模拟中的目标姿势;3) 使用物理引擎模拟人体与环境的交互,并根据物理定律调整姿势;4) 将调整后的姿势反馈给SMPL-X模型,实现物理交互效果。整个过程在保持SMPL-X运动学控制的基础上,引入了物理约束,确保交互的真实性。
关键创新:该方法最重要的创新点在于“半物理”机制,它巧妙地结合了运动学控制和物理模拟。与完全依赖物理模拟的方法相比,该方法能够更好地保持人体运动的自然性和可控性;与完全依赖运动学的方法相比,该方法能够实现更真实的物理交互效果。此外,该方法无需训练,具有良好的泛化能力。
关键设计:该方法的关键设计包括:1) 如何将运动学姿势转化为物理模拟中的目标姿势,需要考虑姿势的对应关系和转换方式;2) 如何在物理引擎中设置人体模型的物理属性,如质量、摩擦力等,以实现真实的物理交互效果;3) 如何在保持运动学控制的同时,引入物理约束,避免模型出现不自然的运动。具体的参数设置和损失函数(如果使用)在论文中未明确说明,属于未知细节。
🖼️ 关键图片


📊 实验亮点
该论文提出的Half-Physics方法无需训练,即可实现SMPL-X模型与环境的物理交互,有效解决了传统运动学模型存在的穿透和不真实物体动力学问题。该方法能够实时运行,并保持了原始运动学运动的保真度,在虚拟现实和机器人等领域具有重要的应用价值。具体的性能数据和对比基线在摘要中未提及,属于未知信息。
🎯 应用场景
该研究成果可广泛应用于虚拟现实、增强现实、游戏开发、机器人控制等领域。例如,可以用于创建更真实的虚拟人物,模拟人与虚拟环境的交互,提高用户体验。在机器人控制方面,可以帮助机器人更好地理解和适应环境,实现更安全、更高效的人机协作。未来,该技术有望进一步推动人机交互技术的发展。
📄 摘要(原文)
While current general-purpose 3D human models (e.g., SMPL-X) efficiently represent accurate human shape and pose, they lacks the ability to physically interact with the environment due to the kinematic nature. As a result, kinematic-based interaction models often suffer from issues such as interpenetration and unrealistic object dynamics. To address this limitation, we introduce a novel approach that embeds SMPL-X into a tangible entity capable of dynamic physical interactions with its surroundings. Specifically, we propose a "half-physics" mechanism that transforms 3D kinematic motion into a physics simulation. Our approach maintains kinematic control over inherent SMPL-X poses while ensuring physically plausible interactions with scenes and objects, effectively eliminating penetration and unrealistic object dynamics. Unlike reinforcement learning-based methods, which demand extensive and complex training, our half-physics method is learning-free and generalizes to any body shape and motion; meanwhile, it operates in real time. Moreover, it preserves the fidelity of the original kinematic motion while seamlessly integrating physical interactions