Impact of Underwater Image Enhancement on Feature Matching
作者: Jason M. Summers, Mark W. Jones
分类: cs.CV
发布日期: 2025-07-29
DOI: 10.3390/s25226966
💡 一句话要点
提出水下图像增强评估框架,提升水下SLAM等应用中的特征匹配稳定性。
🎯 匹配领域: 支柱六:视频提取与匹配 (Video Extraction)
关键词: 水下图像增强 特征匹配 图像质量评估 水下SLAM 水下机器人
📋 核心要点
- 水下图像因光照衰减和散射等因素质量差,影响依赖特征匹配的水下机器人导航。
- 提出一种新的水下图像增强评估框架,关注增强对特征匹配稳定性的影响。
- 实验表明,该框架能有效评估增强算法,并验证了增强对水下SLAM性能的提升。
📝 摘要(中文)
本文提出了一种定量评估水下图像增强效果的新方法,使用局部匹配稳定性和最远可匹配帧作为评价指标。水下图像增强旨在解决光吸收、散射、海洋生物附着和碎片等造成的视觉退化问题。增强后的图像对于水下车辆的路径检测和自主导航等下游任务至关重要,这些任务依赖于鲁棒的特征提取和帧匹配。为了评估增强技术对帧匹配性能的影响,我们设计了一个专门针对水下环境的评估框架。通过基于度量的分析,我们识别了现有方法的优势和局限性,并指出了它们在评估实际应用方面的差距。通过结合实用的匹配策略,我们的框架为比较增强方法提供了一个鲁棒的、上下文感知的基准。最后,我们展示了视觉改进如何影响一个完整的真实算法——同步定位与地图构建(SLAM)的性能,从而加强了该框架在实际水下场景中的相关性。
🔬 方法详解
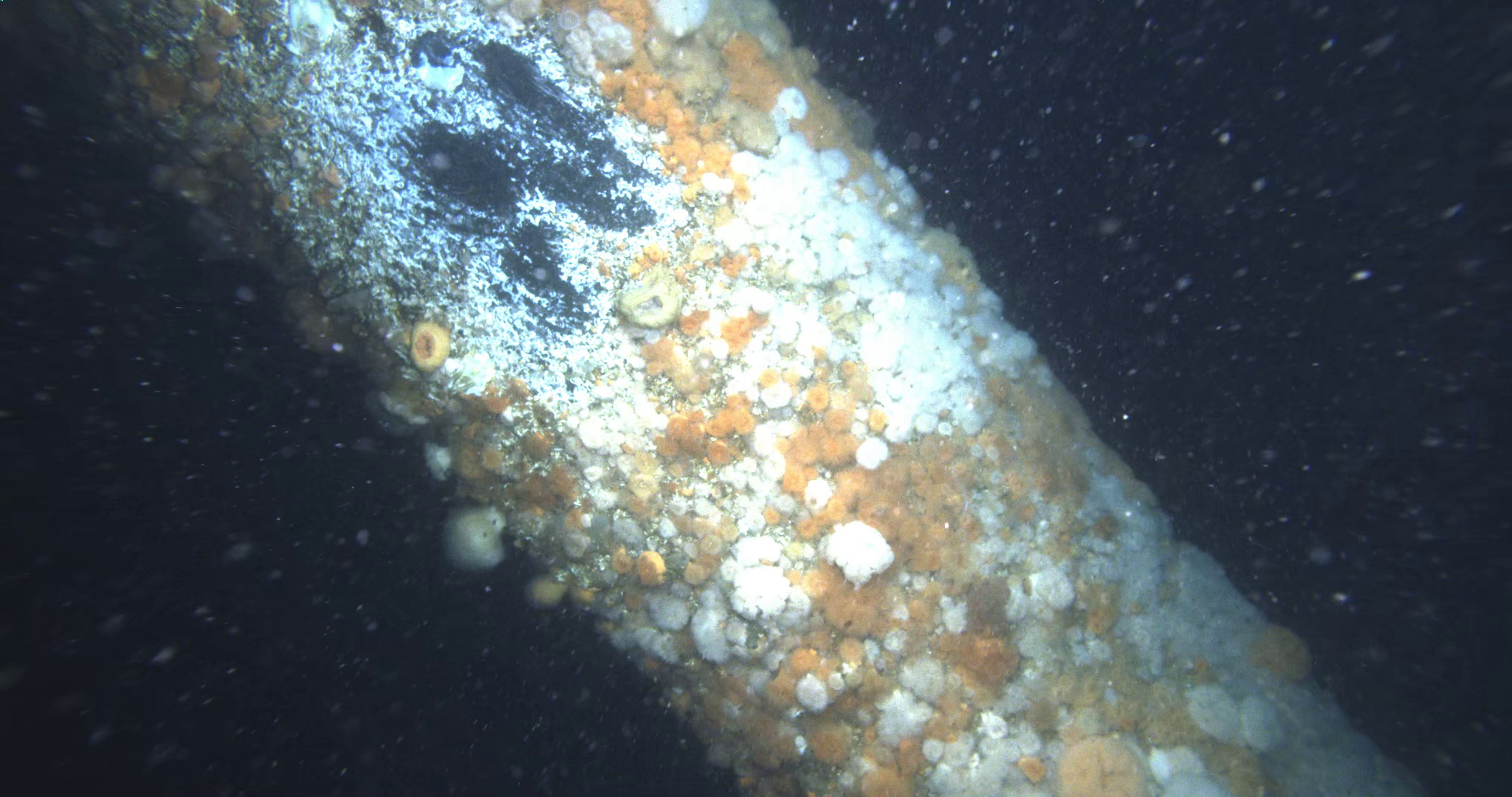
问题定义:水下图像由于光线的吸收、散射以及水中的悬浮颗粒和海洋生物等因素的影响,导致图像质量严重下降,对比度低、颜色失真,这给依赖视觉特征提取和匹配的水下机器人导航、SLAM等任务带来了巨大的挑战。现有的水下图像增强方法缺乏有效的评估手段,难以衡量增强效果对下游任务的实际提升。
核心思路:本文的核心思路是通过定量评估水下图像增强对特征匹配稳定性的影响,来衡量增强算法的有效性。作者认为,好的水下图像增强算法应该能够提高图像的对比度和清晰度,从而使得提取的特征更加稳定和可区分,进而提高帧与帧之间的匹配精度和鲁棒性。通过设计新的评估指标和框架,可以更客观地评价不同增强算法的优劣。
技术框架:该评估框架主要包含以下几个阶段:1) 数据采集:使用水下相机采集真实水下环境的图像序列。2) 图像增强:使用不同的水下图像增强算法对图像序列进行预处理。3) 特征提取与匹配:对增强后的图像序列提取特征点(如SIFT、ORB等),并进行帧与帧之间的特征匹配。4) 性能评估:使用提出的局部匹配稳定性和最远可匹配帧等指标,对不同增强算法的匹配性能进行定量评估。5) SLAM集成:将增强后的图像应用于水下SLAM系统,评估增强对SLAM性能的实际影响。
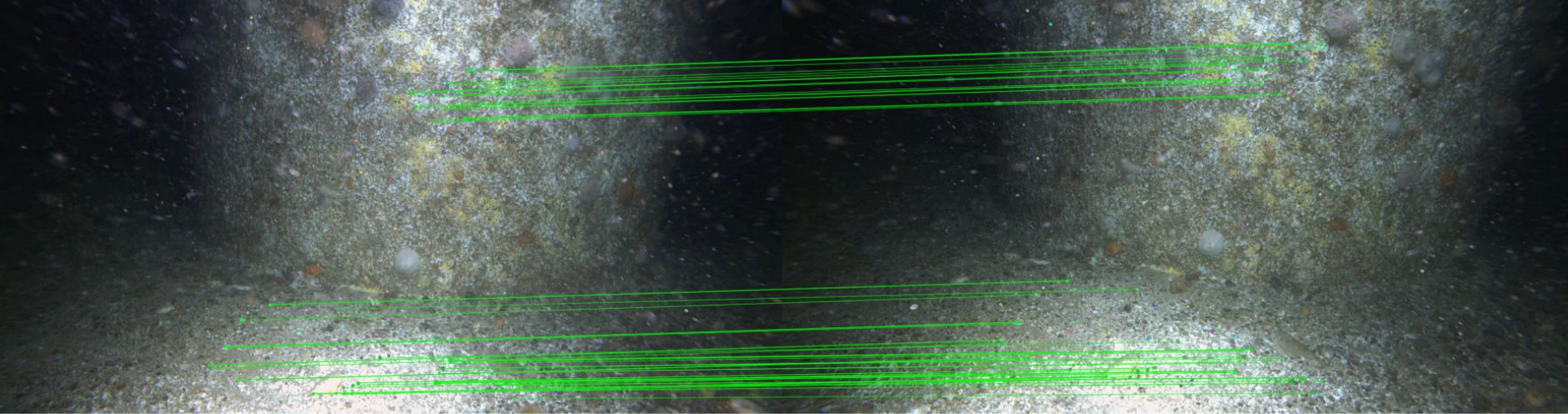
关键创新:本文的关键创新在于提出了局部匹配稳定性和最远可匹配帧这两个新的评估指标。局部匹配稳定性衡量了特征点在相邻帧之间的匹配一致性,反映了特征的鲁棒性。最远可匹配帧衡量了图像序列中能够成功匹配的最远距离,反映了增强算法对图像序列整体匹配性能的提升。与传统的图像质量评价指标(如PSNR、SSIM等)相比,这两个指标更直接地反映了增强对下游特征匹配任务的影响。
关键设计:在特征提取方面,可以选择不同的特征提取算法(如SIFT、ORB等),并根据实际情况调整特征点的数量和匹配策略。在性能评估方面,需要合理设置局部匹配稳定性的阈值,以及最远可匹配帧的距离范围。此外,在SLAM集成方面,需要选择合适的水下SLAM算法,并根据增强后的图像特点调整SLAM系统的参数。
🖼️ 关键图片

📊 实验亮点
实验结果表明,使用该评估框架可以有效区分不同水下图像增强算法的性能差异。通过对比不同增强算法在局部匹配稳定性和最远可匹配帧等指标上的表现,可以发现某些增强算法能够显著提高特征匹配的稳定性和范围。此外,将增强后的图像应用于水下SLAM系统,可以观察到SLAM的定位精度和地图构建质量得到了明显提升。
🎯 应用场景
该研究成果可应用于水下机器人自主导航、水下目标检测与识别、水下环境三维重建等领域。通过选择合适的图像增强算法,可以提高水下视觉系统的鲁棒性和精度,从而提升水下机器人在复杂水下环境中的作业能力。该研究对于推动水下机器人技术的发展具有重要意义。
📄 摘要(原文)
We introduce local matching stability and furthest matchable frame as quantitative measures for evaluating the success of underwater image enhancement. This enhancement process addresses visual degradation caused by light absorption, scattering, marine growth, and debris. Enhanced imagery plays a critical role in downstream tasks such as path detection and autonomous navigation for underwater vehicles, relying on robust feature extraction and frame matching. To assess the impact of enhancement techniques on frame-matching performance, we propose a novel evaluation framework tailored to underwater environments. Through metric-based analysis, we identify strengths and limitations of existing approaches and pinpoint gaps in their assessment of real-world applicability. By incorporating a practical matching strategy, our framework offers a robust, context-aware benchmark for comparing enhancement methods. Finally, we demonstrate how visual improvements affect the performance of a complete real-world algorithm -- Simultaneous Localization and Mapping (SLAM) -- reinforcing the framework's relevance to operational underwater scenarios.