MambaMap: Online Vectorized HD Map Construction using State Space Model
作者: Ruizi Yang, Xiaolu Liu, Junbo Chen, Jianke Zhu
分类: cs.CV
发布日期: 2025-07-27
🔗 代码/项目: GITHUB
💡 一句话要点
MambaMap:利用状态空间模型在线构建矢量化高精地图
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 高精地图 自动驾驶 状态空间模型 时间建模 在线构建
📋 核心要点
- 现有高精地图构建方法在处理长序列时,面临时间信息利用不足和计算开销大的问题。
- MambaMap通过状态空间模型融合长程时间特征,并引入记忆库和门控机制,提升效率和鲁棒性。
- 在nuScenes和Argoverse2数据集上,MambaMap在精度和时间一致性方面均优于现有方法。
📝 摘要(中文)
高精地图(HD Map)对于自动驾驶至关重要,它为下游任务提供精确的道路信息。最近的研究表明,时间建模在解决遮挡和扩展感知范围等挑战方面具有潜力。然而,现有方法要么未能充分利用时间信息,要么在处理长序列时产生巨大的计算开销。为了应对这些挑战,我们提出了MambaMap,这是一个新颖的框架,它有效地融合状态空间中的长程时间特征,以构建在线矢量化高精地图。具体来说,MambaMap结合了一个记忆库来存储和利用来自历史帧的信息,动态更新BEV特征和实例查询,以提高对噪声和遮挡的鲁棒性。此外,我们在状态空间中引入了一种门控机制,有选择地整合地图元素的依赖关系,从而实现高计算效率。此外,我们设计了创新的多方向和时空扫描策略,以增强BEV和实例级别的特征提取。这些策略显著提高了我们方法的预测精度,同时确保了鲁棒的时间一致性。在nuScenes和Argoverse2数据集上的大量实验表明,我们提出的MambaMap方法在各种分割和感知范围上优于最先进的方法。
🔬 方法详解
问题定义:现有高精地图构建方法在处理长序列数据时,面临两个主要痛点。一是未能充分利用时间信息,导致对遮挡和噪声的鲁棒性较差。二是计算复杂度高,难以满足在线构建的需求。这些问题限制了自动驾驶系统在高动态环境下的应用。
核心思路:MambaMap的核心思路是利用状态空间模型(SSM)高效地融合长程时间特征。通过将历史信息存储在记忆库中,并使用门控机制选择性地整合地图元素的依赖关系,从而提高对噪声和遮挡的鲁棒性,并降低计算复杂度。这种设计旨在实现高精度和高效率的在线高精地图构建。
技术框架:MambaMap的整体框架包括以下几个主要模块:1) 特征提取模块:从原始图像或点云数据中提取BEV(Bird's-Eye-View)特征。2) 记忆库:存储历史帧的BEV特征,用于时间信息的融合。3) 状态空间模型:利用SSM对时间序列特征进行建模,并使用门控机制选择性地整合地图元素的依赖关系。4) 实例查询模块:动态更新实例查询,以提高对噪声和遮挡的鲁棒性。5) 地图元素预测模块:基于融合后的特征,预测地图元素的类别、位置和形状。
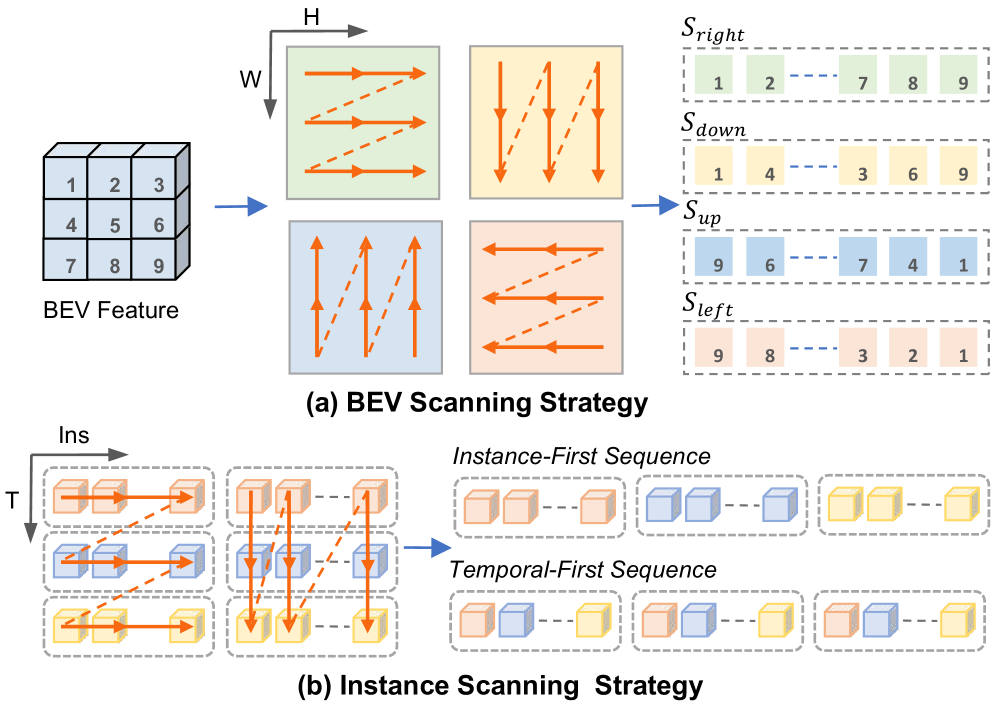
关键创新:MambaMap的关键创新在于以下几个方面:1) 引入记忆库,存储和利用历史帧的信息。2) 在状态空间模型中引入门控机制,选择性地整合地图元素的依赖关系,提高计算效率。3) 设计了创新的多方向和时空扫描策略,增强BEV和实例级别的特征提取。这些创新使得MambaMap能够在保证精度的同时,显著降低计算复杂度。
关键设计:MambaMap的关键设计包括:1) 记忆库的容量和更新策略。2) 状态空间模型的参数设置和训练方法。3) 门控机制的实现方式和门控值的计算方法。4) 多方向和时空扫描策略的具体实现。5) 损失函数的设计,例如,使用交叉熵损失函数进行地图元素类别的预测,使用L1损失函数进行位置和形状的回归。
🖼️ 关键图片


📊 实验亮点
MambaMap在nuScenes和Argoverse2数据集上进行了广泛的实验,结果表明,MambaMap在各种分割和感知范围上均优于最先进的方法。具体来说,MambaMap在地图元素预测的精度和时间一致性方面均取得了显著提升,尤其是在处理遮挡和噪声的情况下,MambaMap的鲁棒性更强。这些实验结果验证了MambaMap的有效性和优越性。
🎯 应用场景
MambaMap可应用于自动驾驶、高精地图服务、智能交通系统等领域。它能够为自动驾驶车辆提供准确、实时的道路信息,提高车辆的安全性和可靠性。此外,MambaMap还可以用于构建城市级别的数字孪生,为城市规划和管理提供数据支持。未来,MambaMap有望成为自动驾驶和智慧城市建设的关键基础设施。
📄 摘要(原文)
High-definition (HD) maps are essential for autonomous driving, as they provide precise road information for downstream tasks. Recent advances highlight the potential of temporal modeling in addressing challenges like occlusions and extended perception range. However, existing methods either fail to fully exploit temporal information or incur substantial computational overhead in handling extended sequences. To tackle these challenges, we propose MambaMap, a novel framework that efficiently fuses long-range temporal features in the state space to construct online vectorized HD maps. Specifically, MambaMap incorporates a memory bank to store and utilize information from historical frames, dynamically updating BEV features and instance queries to improve robustness against noise and occlusions. Moreover, we introduce a gating mechanism in the state space, selectively integrating dependencies of map elements in high computational efficiency. In addition, we design innovative multi-directional and spatial-temporal scanning strategies to enhance feature extraction at both BEV and instance levels. These strategies significantly boost the prediction accuracy of our approach while ensuring robust temporal consistency. Extensive experiments on the nuScenes and Argoverse2 datasets demonstrate that our proposed MambaMap approach outperforms state-of-the-art methods across various splits and perception ranges. Source code will be available at https://github.com/ZiziAmy/MambaMap.