RESCUE: Crowd Evacuation Simulation via Controlling SDM-United Characters
作者: Xiaolin Liu, Tianyi Zhou, Hongbo Kang, Jian Ma, Ziwen Wang, Jing Huang, Wenguo Weng, Yu-Kun Lai, Kun Li
分类: cs.CV
发布日期: 2025-07-27 (更新: 2025-10-04)
💡 一句话要点
RESCUE:通过控制SDM联合角色实现人群疏散仿真
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人群疏散仿真 社会力模型 SDM模型 3D仿真 个性化行为 动态轨迹规划 公共安全 虚拟环境
📋 核心要点
- 现有疏散模型忽略了行人碰撞、人际互动、地形和体型影响等复杂人类行为,导致仿真结果不准确。
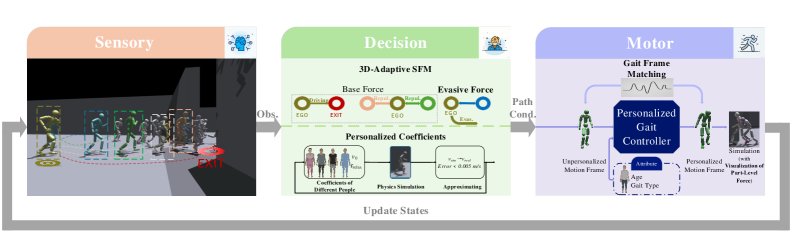
- RESCUE框架模拟人类大脑的SDM流程,集成了3D自适应SFM决策机制和个性化步态控制,实现更真实的疏散。
- 实验表明,该框架支持动态轨迹规划和个性化行为,兼容不平坦地形,并提供零件级力可视化分析。
📝 摘要(中文)
人群疏散仿真对于提高公共安全至关重要,并且需要逼真的虚拟环境。目前主流的疏散模型忽略了疏散过程中复杂的人类行为,例如行人碰撞、人际互动以及受地形类型或个体体型影响的行为变化。这导致无法准确模拟真实世界中人们的逃生。本文与人类大脑的感知-决策-运动(SDM)流程保持一致,提出了一个实时3D人群疏散仿真框架,该框架集成了3D自适应SFM(社会力模型)决策机制和个性化步态控制电机。该框架允许多个智能体并行移动,适用于各种场景,并具有动态人群感知能力。此外,我们引入了零件级力可视化来辅助疏散分析。实验结果表明,我们的框架支持疏散过程中每个智能体的动态轨迹规划和个性化行为,并且与不平坦地形兼容。在视觉上,我们的方法生成了更真实、更合理的疏散结果,为人群模拟提供了增强的洞察力。
🔬 方法详解
问题定义:现有的人群疏散模型无法充分模拟真实世界中人群疏散的复杂行为,例如行人之间的碰撞、个体之间的互动以及地形和个体体型差异对行为的影响。这些因素的缺失导致仿真结果与真实情况存在较大偏差,难以有效指导实际的疏散策略制定。
核心思路:本文的核心思路是模拟人类大脑的感知-决策-运动(SDM)流程,将人群疏散过程分解为感知环境、做出决策和执行动作三个阶段。通过模拟这三个阶段,可以更真实地还原人群疏散的行为模式。
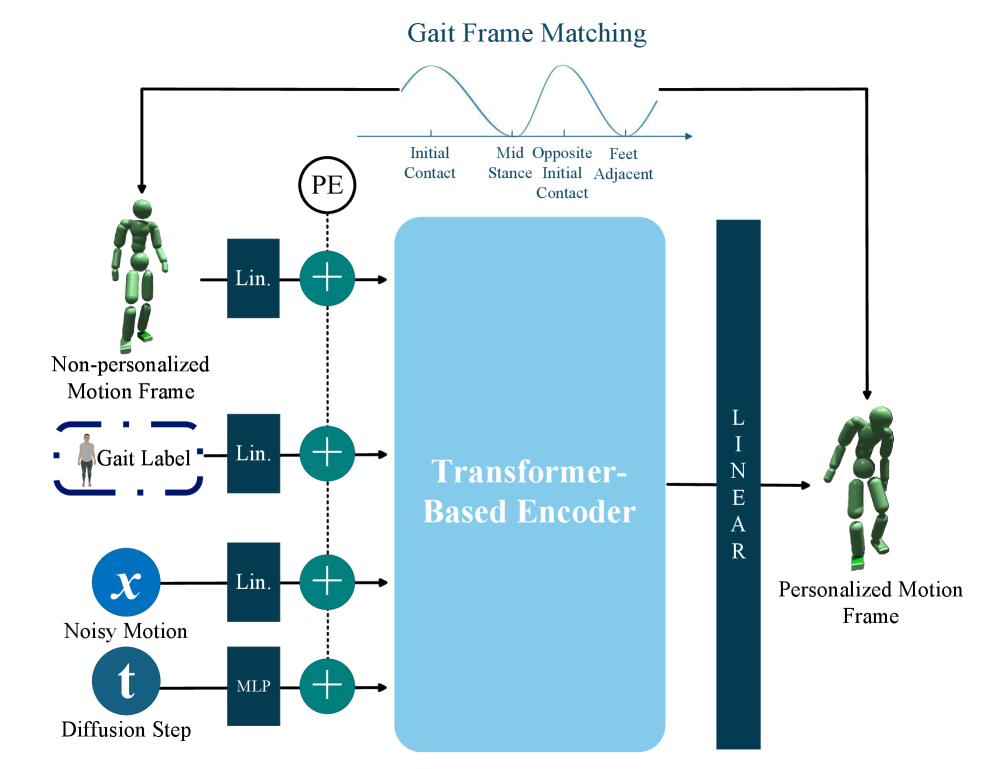
技术框架:RESCUE框架主要包含以下几个模块:1) 3D自适应社会力模型(SFM):用于模拟个体之间的相互作用力,并根据地形和个体体型进行调整。2) 决策机制:根据感知到的环境信息(例如出口位置、障碍物、人群密度)做出疏散决策,例如选择逃生路径。3) 个性化步态控制电机:控制个体的运动,并根据个体的体型和决策结果调整步态。4) 零件级力可视化:用于分析疏散过程中个体受到的力,从而更好地理解疏散过程。
关键创新:该方法的关键创新在于将人类大脑的SDM流程引入人群疏散仿真,并结合3D自适应SFM、决策机制和个性化步态控制,从而更真实地模拟人群疏散行为。与传统的基于简单规则的模型相比,该方法能够更好地捕捉人群疏散的复杂性和个体差异。
关键设计:3D自适应SFM根据地形坡度和个体尺寸调整斥力参数,决策机制采用A*算法进行路径规划,并考虑人群密度和个体恐慌程度等因素。个性化步态控制电机则根据个体体型和速度需求调整步幅和步频。零件级力可视化通过颜色编码显示个体受到的不同方向的力的大小。
🖼️ 关键图片

📊 实验亮点
实验结果表明,RESCUE框架能够生成更真实、更合理的疏散结果,支持动态轨迹规划和个性化行为,并且与不平坦地形兼容。与传统SFM模型相比,该方法在人群密度较高的情况下能够更好地避免拥堵,提高疏散效率。零件级力可视化功能为疏散分析提供了新的视角。
🎯 应用场景
该研究成果可应用于公共安全领域,例如大型活动的人群疏散方案设计、建筑物安全评估和灾难应急预案制定。通过逼真的人群疏散仿真,可以预测潜在的安全风险,优化疏散路线,提高疏散效率,从而减少人员伤亡。未来,该技术还可应用于虚拟现实游戏和电影制作,提供更真实的人群行为模拟。
📄 摘要(原文)
Crowd evacuation simulation is critical for enhancing public safety, and demanded for realistic virtual environments. Current mainstream evacuation models overlook the complex human behaviors that occur during evacuation, such as pedestrian collisions, interpersonal interactions, and variations in behavior influenced by terrain types or individual body shapes. This results in the failure to accurately simulate the escape of people in the real world. In this paper, aligned with the sensory-decision-motor (SDM) flow of the human brain, we propose a real-time 3D crowd evacuation simulation framework that integrates a 3D-adaptive SFM (Social Force Model) Decision Mechanism and a Personalized Gait Control Motor. This framework allows multiple agents to move in parallel and is suitable for various scenarios, with dynamic crowd awareness. Additionally, we introduce Part-level Force Visualization to assist in evacuation analysis. Experimental results demonstrate that our framework supports dynamic trajectory planning and personalized behavior for each agent throughout the evacuation process, and is compatible with uneven terrain. Visually, our method generates evacuation results that are more realistic and plausible, providing enhanced insights for crowd simulation. The code is available at http://cic.tju.edu.cn/faculty/likun/projects/RESCUE.