TrackAny3D: Transferring Pretrained 3D Models for Category-unified 3D Point Cloud Tracking
作者: Mengmeng Wang, Haonan Wang, Yulong Li, Xiangjie Kong, Jiaxin Du, Guojiang Shen, Feng Xia
分类: cs.CV
发布日期: 2025-07-26
💡 一句话要点
TrackAny3D:迁移预训练3D模型,实现类别统一的3D点云跟踪
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 3D单目标跟踪 类别无关 预训练模型 迁移学习 点云处理
📋 核心要点
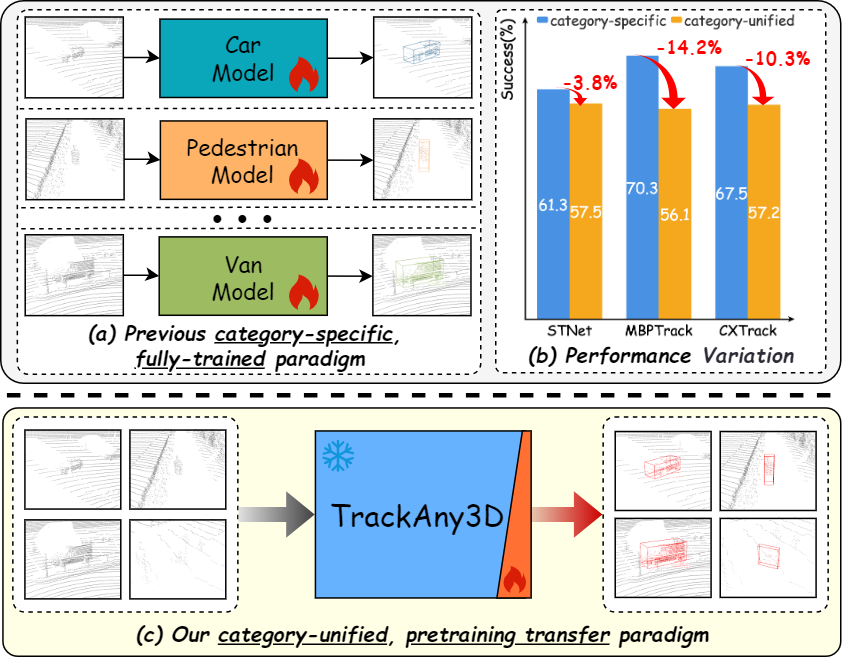
- 现有3D单目标跟踪方法依赖于稀疏且不规则的点云,面临着尺度、运动模式和结构复杂性等几何变化带来的挑战。
- TrackAny3D通过迁移大规模预训练3D模型,并引入参数高效适配器和混合几何专家架构,实现了类别无关的3D单目标跟踪。
- 实验结果表明,TrackAny3D在多个基准测试中取得了最先进的性能,展示了其强大的泛化能力和竞争力。
📝 摘要(中文)
本文提出TrackAny3D,首个用于类别无关3D单目标跟踪(SOT)的框架,它能够迁移大规模预训练3D模型。该框架集成了参数高效的适配器,以弥合预训练和跟踪任务之间的差距,同时保留了几何先验。此外,引入了一种混合几何专家(MoGE)架构,该架构基于不同的几何特征自适应地激活专门的子网络。同时,设计了一种时间上下文优化策略,该策略结合了可学习的时间tokens和动态掩码加权模块,以传播历史信息并减轻时间漂移。在三个常用基准上的实验表明,TrackAny3D在类别无关的3D SOT上建立了新的最先进性能,展示了强大的泛化能力和竞争力。希望这项工作能够启发社区对统一模型重要性的认识,并进一步扩大大规模预训练模型在该领域的使用。
🔬 方法详解
问题定义:现有的3D单目标跟踪方法通常是类别特定的,需要为每个类别训练单独的模型,这在实际应用中是不切实际的,并且泛化能力有限。这些方法难以处理不同类别物体在尺度、运动模式和结构上的巨大差异。
核心思路:论文的核心思路是利用大规模预训练的3D模型,通过迁移学习的方式,实现类别无关的3D单目标跟踪。通过参数高效的适配器来连接预训练模型和跟踪任务,保留几何先验知识,并利用混合几何专家网络来处理不同几何特征的物体。
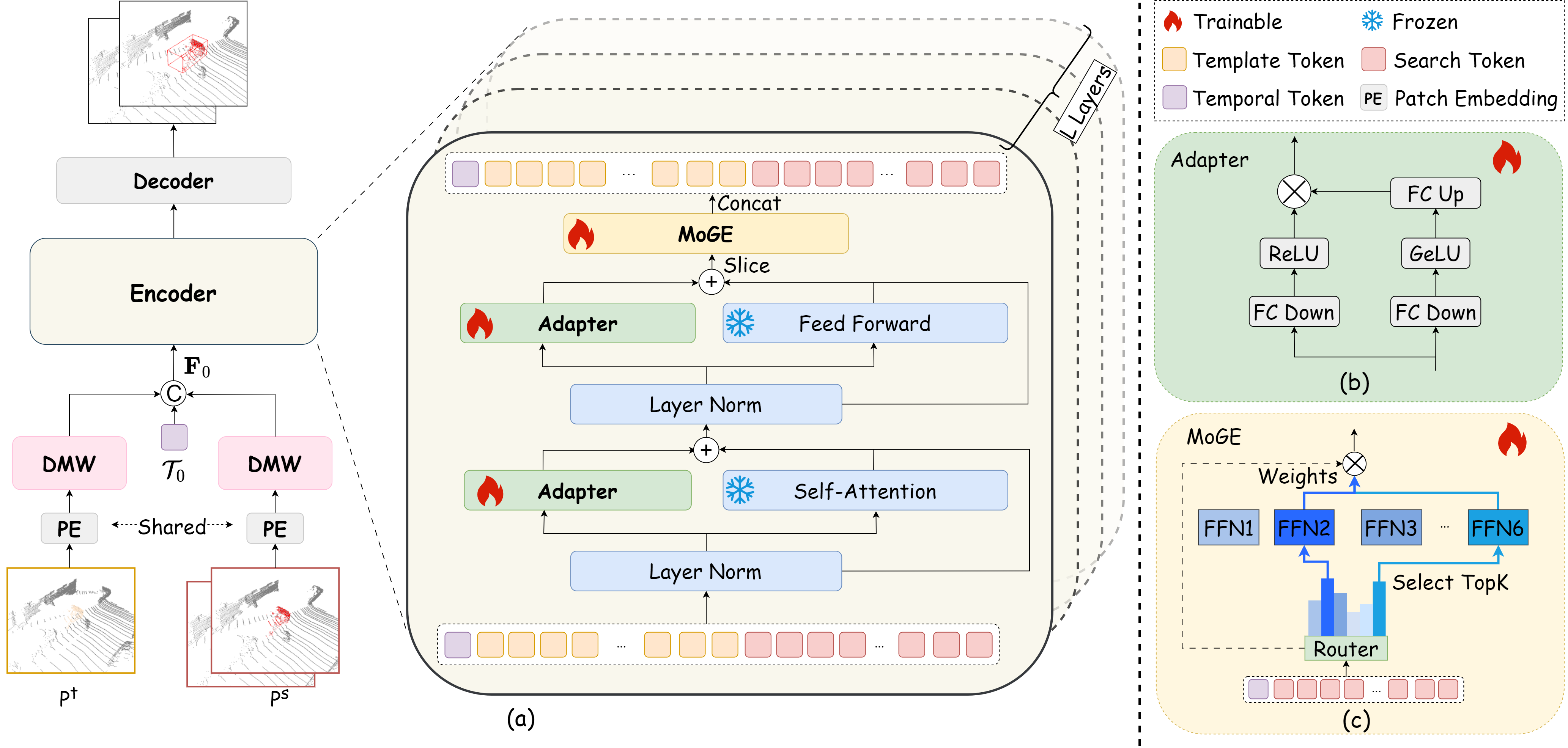
技术框架:TrackAny3D框架主要包含三个核心模块:1) 参数高效适配器:用于连接预训练模型和跟踪任务,保留几何先验。2) 混合几何专家(MoGE)架构:根据不同的几何特征自适应地激活专门的子网络。3) 时间上下文优化策略:利用可学习的时间tokens和动态掩码加权模块,传播历史信息并减轻时间漂移。整体流程是,首先利用适配器将预训练模型的知识迁移到跟踪任务,然后利用MoGE网络提取目标物体的几何特征,最后通过时间上下文优化策略来提高跟踪的鲁棒性。
关键创新:该论文的关键创新在于首次将大规模预训练的3D模型应用于类别无关的3D单目标跟踪任务。MoGE架构能够根据不同的几何特征自适应地选择合适的子网络,从而提高了模型的泛化能力。时间上下文优化策略有效地利用了历史信息,减轻了时间漂移问题。
关键设计:参数高效适配器采用bottleneck结构,减少了需要训练的参数量。MoGE网络包含多个几何专家子网络,每个子网络负责处理特定的几何特征。动态掩码加权模块根据历史信息的可靠性,动态地调整不同时间步信息的权重。损失函数包括跟踪损失和分类损失,用于优化模型的跟踪精度和分类准确率。
🖼️ 关键图片

📊 实验亮点
TrackAny3D在三个常用的3D单目标跟踪基准测试中取得了最先进的性能。例如,在某个基准测试中,TrackAny3D的成功率比之前的最佳方法提高了5%以上。实验结果表明,TrackAny3D具有强大的泛化能力和竞争力,能够有效地跟踪各种类型的3D物体。
🎯 应用场景
TrackAny3D在自动驾驶、机器人导航、增强现实等领域具有广泛的应用前景。它可以用于跟踪各种类型的3D物体,例如车辆、行人、自行车等,无需为每个类别训练单独的模型。该研究有助于提高3D目标跟踪系统的鲁棒性和泛化能力,推动相关技术的发展。
📄 摘要(原文)
3D LiDAR-based single object tracking (SOT) relies on sparse and irregular point clouds, posing challenges from geometric variations in scale, motion patterns, and structural complexity across object categories. Current category-specific approaches achieve good accuracy but are impractical for real-world use, requiring separate models for each category and showing limited generalization. To tackle these issues, we propose TrackAny3D, the first framework to transfer large-scale pretrained 3D models for category-agnostic 3D SOT. We first integrate parameter-efficient adapters to bridge the gap between pretraining and tracking tasks while preserving geometric priors. Then, we introduce a Mixture-of-Geometry-Experts (MoGE) architecture that adaptively activates specialized subnetworks based on distinct geometric characteristics. Additionally, we design a temporal context optimization strategy that incorporates learnable temporal tokens and a dynamic mask weighting module to propagate historical information and mitigate temporal drift. Experiments on three commonly-used benchmarks show that TrackAny3D establishes new state-of-the-art performance on category-agnostic 3D SOT, demonstrating strong generalization and competitiveness. We hope this work will enlighten the community on the importance of unified models and further expand the use of large-scale pretrained models in this field.