MagShield: Towards Better Robustness in Sparse Inertial Motion Capture Under Magnetic Disturbances
作者: Yunzhe Shao, Xinyu Yi, Lu Yin, Shihui Guo, Junhai Yong, Feng Xu
分类: cs.CV, cs.GR
发布日期: 2025-06-28
💡 一句话要点
MagShield:提升磁干扰下稀疏惯性动作捕捉的鲁棒性
🎯 匹配领域: 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 惯性动作捕捉 磁干扰 姿态估计 多传感器融合 鲁棒性
📋 核心要点
- 现有IMU系统易受磁场干扰,导致姿态估计不准,限制了其在复杂环境中的应用。
- MagShield采用“检测-然后-校正”策略,利用多IMU信息和人体运动先验来消除磁干扰的影响。
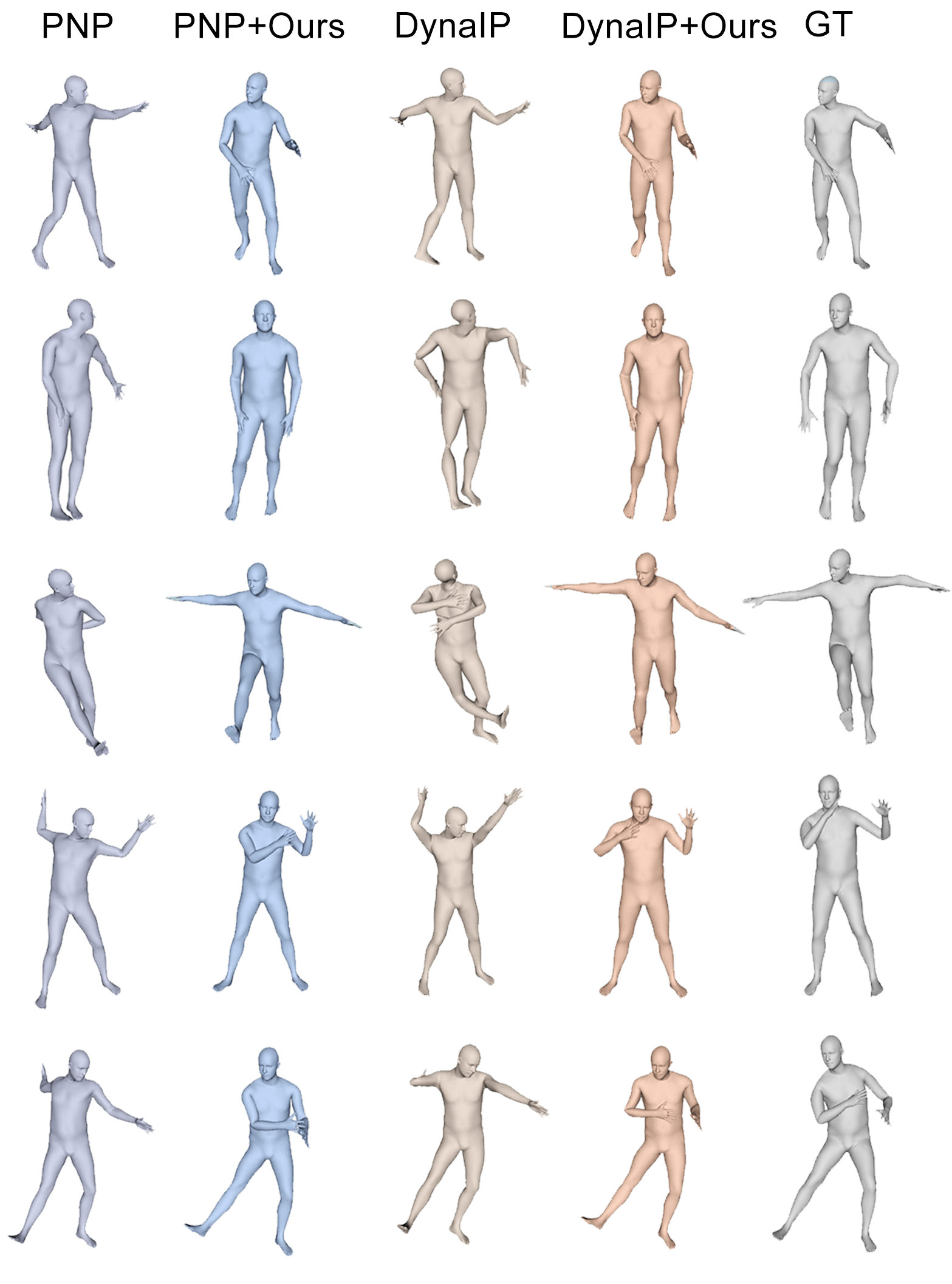
- 实验表明,MagShield能有效提升现有稀疏惯性MoCap系统在磁干扰下的动作捕捉精度。
📝 摘要(中文)
本文提出了一种名为MagShield的新方法,旨在解决稀疏惯性动作捕捉(MoCap)系统中存在的磁干扰问题。现有的惯性测量单元(IMU)系统在磁干扰环境中容易出现姿态估计误差,限制了其在实际场景中的应用。为了解决这个问题,MagShield采用了一种“检测-然后-校正”的策略,首先通过多IMU联合分析来检测磁干扰,然后使用人体运动先验来校正姿态误差。MagShield可以与大多数现有的稀疏惯性MoCap系统集成,从而提高它们在磁干扰环境中的性能。实验结果表明,MagShield显著提高了磁干扰下的动作捕捉精度,并在不同的稀疏惯性MoCap系统中表现出良好的兼容性。
🔬 方法详解
问题定义:论文旨在解决稀疏惯性动作捕捉系统中,由于磁场干扰导致的姿态估计误差问题。现有方法在磁场干扰下,IMU数据会受到污染,从而影响动作捕捉的准确性和可靠性。这种问题限制了惯性MoCap系统在实际复杂环境中的应用。
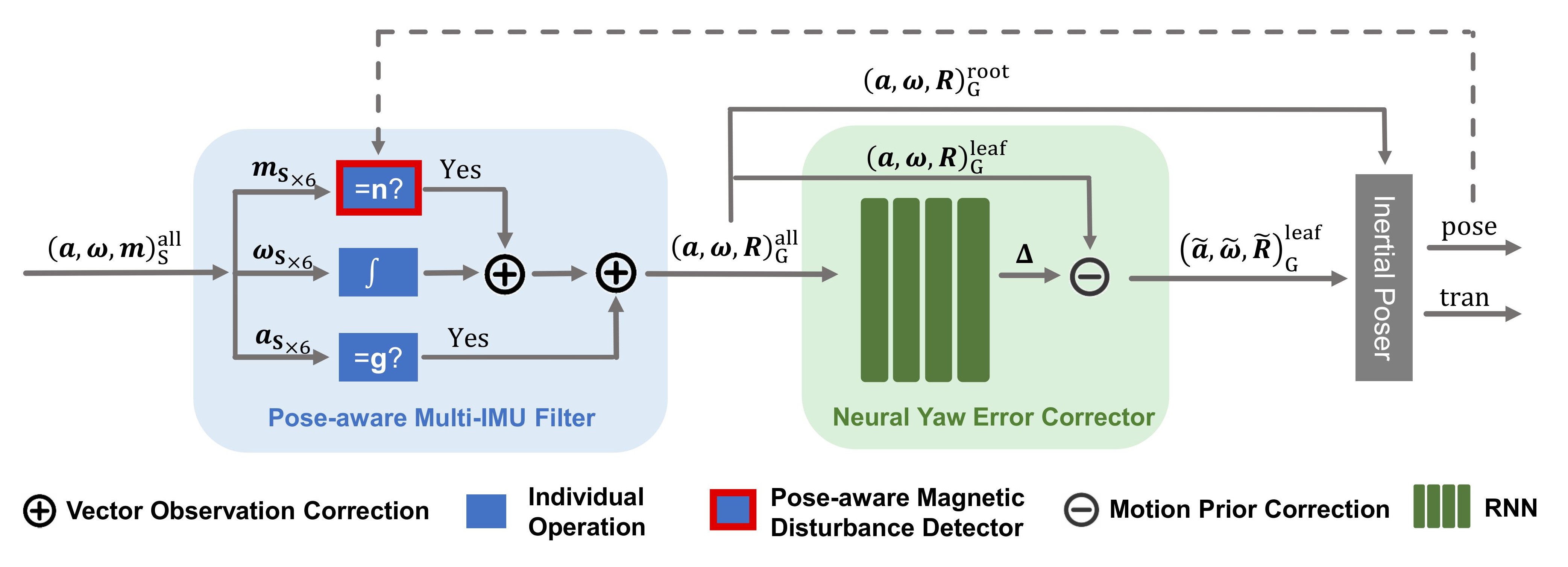
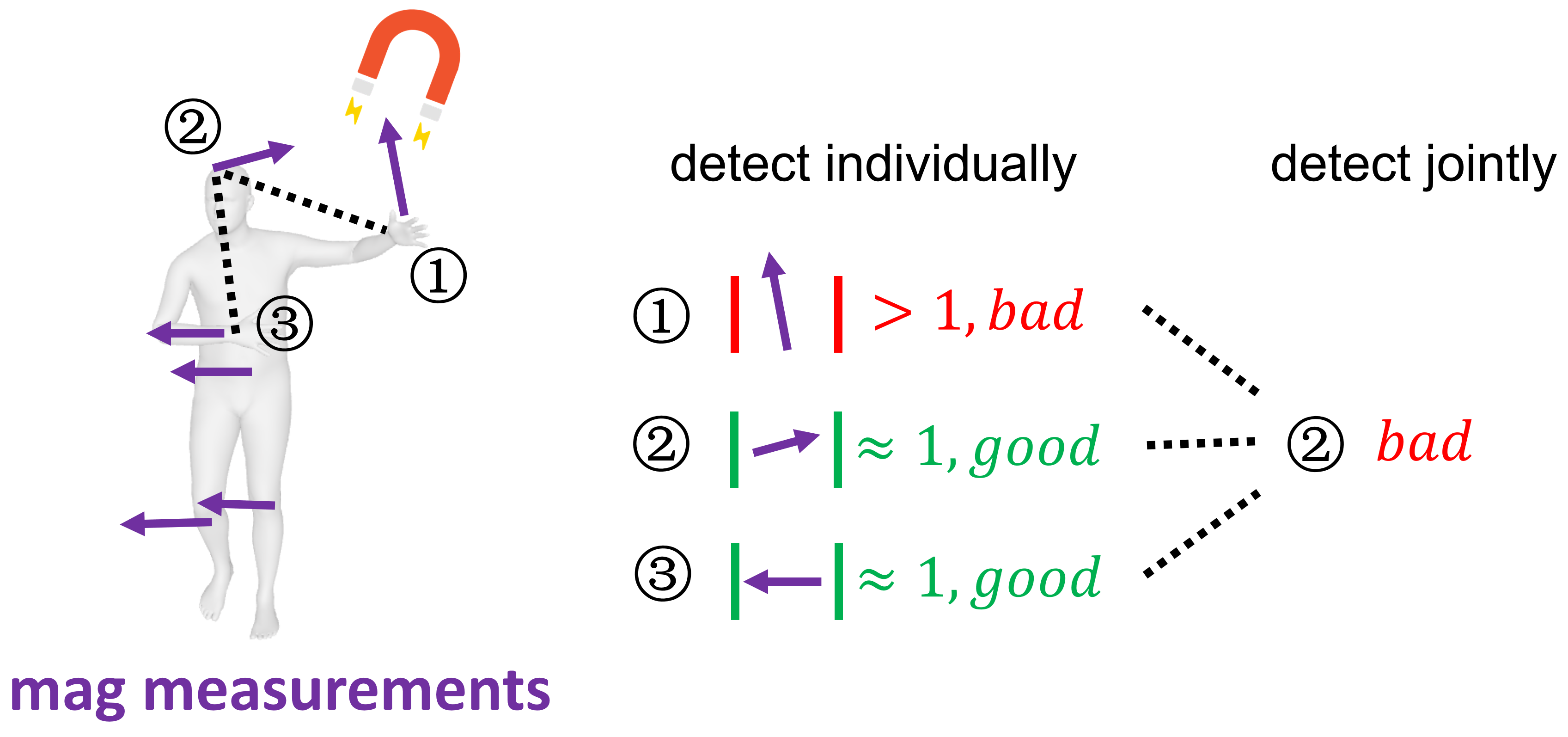
核心思路:MagShield的核心思路是首先检测磁场干扰,然后利用人体运动的先验知识来校正受干扰的姿态估计。通过多IMU的联合分析,可以识别出受到磁场干扰的IMU,并利用其他IMU的信息以及人体运动的规律来修正其姿态。
技术框架:MagShield的技术框架主要包含两个阶段:磁干扰检测和姿态校正。在磁干扰检测阶段,利用多IMU数据进行一致性检验,识别出受干扰的IMU。在姿态校正阶段,利用人体运动学模型和优化算法,结合未受干扰的IMU数据,对受干扰的IMU的姿态进行修正。
关键创新:MagShield的关键创新在于其“检测-然后-校正”的策略,以及利用多IMU联合分析进行磁干扰检测的方法。与传统方法直接依赖单个IMU数据进行姿态估计不同,MagShield能够识别并消除磁场干扰的影响,从而提高动作捕捉的鲁棒性。
关键设计:在磁干扰检测阶段,可能使用了基于残差分析或卡尔曼滤波等方法来检测IMU数据的一致性。在姿态校正阶段,可能使用了基于优化的方法,例如最小二乘法或梯度下降法,来最小化重投影误差或运动学约束误差。具体的参数设置、损失函数和网络结构等细节未知,需要参考论文原文。
🖼️ 关键图片
📊 实验亮点
实验结果表明,MagShield能够显著提高磁干扰下的动作捕捉精度。具体性能数据未知,但论文强调MagShield在不同稀疏惯性MoCap系统中表现出良好的兼容性,这意味着它可以方便地集成到现有系统中,并带来性能提升。与未采用MagShield的系统相比,精度提升幅度未知,需要参考论文原文。
🎯 应用场景
MagShield技术可应用于各种需要高精度动作捕捉的领域,例如虚拟现实、增强现实、运动分析、康复训练和人机交互等。通过提高惯性MoCap系统在复杂环境下的鲁棒性,MagShield能够扩展其应用范围,并提升用户体验。未来,该技术有望在工业、医疗和娱乐等领域发挥重要作用。
📄 摘要(原文)
This paper proposes a novel method called MagShield, designed to address the issue of magnetic interference in sparse inertial motion capture (MoCap) systems. Existing Inertial Measurement Unit (IMU) systems are prone to orientation estimation errors in magnetically disturbed environments, limiting their practical application in real-world scenarios. To address this problem, MagShield employs a "detect-then-correct" strategy, first detecting magnetic disturbances through multi-IMU joint analysis, and then correcting orientation errors using human motion priors. MagShield can be integrated with most existing sparse inertial MoCap systems, improving their performance in magnetically disturbed environments. Experimental results demonstrate that MagShield significantly enhances the accuracy of motion capture under magnetic interference and exhibits good compatibility across different sparse inertial MoCap systems.