Floating Car Observers in Intelligent Transportation Systems: Detection Modeling and Temporal Insights
作者: Jeremias Gerner, Klaus Bogenberger, Stefanie Schmidtner
分类: physics.soc-ph, cs.CV, eess.SY
发布日期: 2025-04-29
💡 一句话要点
提出基于浮动车观测器的智能交通系统车辆检测建模与时序分析方法
🎯 匹配领域: 支柱四:生成式动作 (Generative Motion)
关键词: 浮动车观测器 智能交通系统 车辆检测 交通仿真 神经网络仿真 数据驱动方法 交通状态估计
📋 核心要点
- 现有交通数据收集方法存在局限性,难以提供全面、实时的交通参与者信息,影响智能交通系统的性能。
- 利用浮动车观测器(FCO)集成车载传感器,通过建模和仿真,提升交通参与者的检测和定位能力,从而改善交通数据质量。
- 实验表明,即使在较低的渗透率下,FCO也能有效检测车辆,结合时间信息可进一步提升检测覆盖率和准确性。
📝 摘要(中文)
本文扩展了传统的浮动车数据(FCD),利用浮动车观测器(FCO)集成车载传感器来检测和定位其他交通参与者,从而提供更丰富、更详细的交通数据。我们探索了微观交通仿真中FCO检测的各种建模方法,以评估其在智能交通系统(ITS)应用中的潜力。这些方法包括2D光线追踪和高保真协同仿真,后者模拟真实世界的传感器并集成3D目标检测算法,以尽可能逼真地复现FCO检测。此外,我们还引入了一种基于神经网络的仿真技术,可以有效地近似高保真协同仿真的结果。该方法在提供快速、可扩展的建模方案的同时,捕捉了FCO检测的独特特征。我们使用该仿真方法,研究了FCO数据在SUMO建模的交通网络数字孪生中的影响。结果表明,即使在20%的渗透率下,使用基于激光雷达检测的FCO也能识别各种交叉路口和交通需求场景中65%的车辆。当集成时间信息时,可以进一步恢复先前检测到但当前未看到的车辆。通过采用数据驱动的方法,我们以最小的位置偏差恢复了超过80%的此类车辆。这些发现强调了FCO在ITS中的潜力,尤其是在提高不同渗透率和交通条件下的交通状态估计和监控方面。
🔬 方法详解
问题定义:论文旨在解决智能交通系统中交通状态估计和监控的问题。现有方法,如传统的浮动车数据(FCD),无法提供足够详细和实时的交通参与者信息。缺乏对周围车辆的精确检测和定位能力,限制了智能交通系统的应用效果。
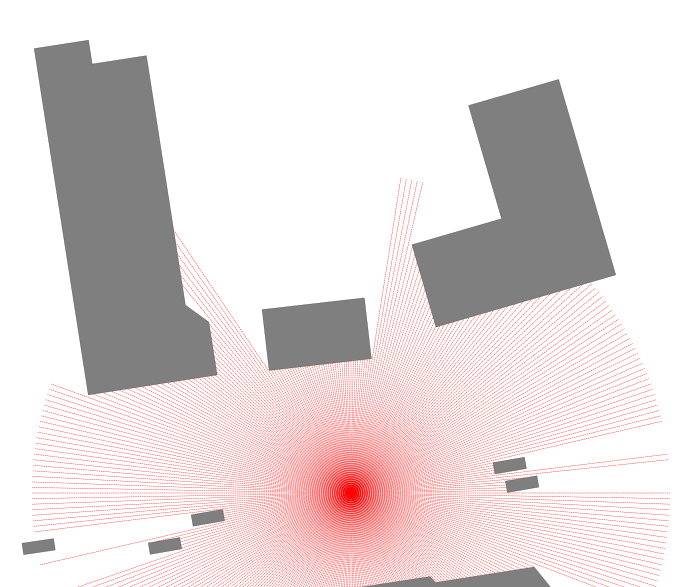
核心思路:论文的核心思路是利用浮动车观测器(FCO)作为移动传感器平台,通过车载传感器(如激光雷达)检测周围车辆,并结合不同的建模方法来模拟和评估FCO在交通网络中的性能。通过仿真不同渗透率和交通条件下的FCO数据,分析其对交通状态估计和监控的影响。
技术框架:整体框架包括以下几个主要模块:1) 交通仿真环境(SUMO)的搭建;2) FCO检测建模,包括2D光线追踪、高保真协同仿真和神经网络仿真;3) 基于神经网络的仿真技术,用于快速近似高保真协同仿真的结果;4) 数据驱动方法,用于恢复先前检测到但当前未看到的车辆;5) 性能评估,包括车辆检测率和位置偏差等指标。
关键创新:论文的关键创新在于提出了一种基于神经网络的仿真技术,能够有效地近似高保真协同仿真的结果,同时具有快速和可扩展的优点。此外,论文还探索了利用时间信息来恢复先前检测到的车辆,进一步提高了车辆检测的覆盖率。
关键设计:神经网络仿真技术使用了多层感知机(MLP)来学习高保真协同仿真的输出。损失函数采用均方误差(MSE)来衡量预测值与真实值之间的差异。数据驱动方法使用了卡尔曼滤波等技术来预测车辆的未来位置,从而恢复先前检测到的车辆。渗透率设置为20%,并评估了不同交通需求场景下的性能。
🖼️ 关键图片


📊 实验亮点
实验结果表明,即使在20%的FCO渗透率下,基于激光雷达检测的FCO也能识别各种交叉路口和交通需求场景中65%的车辆。通过集成时间信息,采用数据驱动的方法,可以恢复超过80%的先前检测到但当前未看到的车辆,且位置偏差最小。这些结果验证了FCO在提高交通状态估计和监控方面的潜力。
🎯 应用场景
该研究成果可应用于智能交通系统中的交通状态估计、交通监控、自动驾驶和车路协同等领域。通过提高交通数据的质量和覆盖率,可以优化交通流量、减少拥堵、提高安全性,并为自动驾驶车辆提供更可靠的环境感知信息。未来,该技术有望在城市交通管理和智能出行服务中发挥重要作用。
📄 摘要(原文)
Floating Car Observers (FCOs) extend traditional Floating Car Data (FCD) by integrating onboard sensors to detect and localize other traffic participants, providing richer and more detailed traffic data. In this work, we explore various modeling approaches for FCO detections within microscopic traffic simulations to evaluate their potential for Intelligent Transportation System (ITS) applications. These approaches range from 2D raytracing to high-fidelity co-simulations that emulate real-world sensors and integrate 3D object detection algorithms to closely replicate FCO detections. Additionally, we introduce a neural network-based emulation technique that effectively approximates the results of high-fidelity co-simulations. This approach captures the unique characteristics of FCO detections while offering a fast and scalable solution for modeling. Using this emulation method, we investigate the impact of FCO data in a digital twin of a traffic network modeled in SUMO. Results demonstrate that even at a 20% penetration rate, FCOs using LiDAR-based detections can identify 65% of vehicles across various intersections and traffic demand scenarios. Further potential emerges when temporal insights are integrated, enabling the recovery of previously detected but currently unseen vehicles. By employing data-driven methods, we recover over 80% of these vehicles with minimal positional deviations. These findings underscore the potential of FCOs for ITS, particularly in enhancing traffic state estimation and monitoring under varying penetration rates and traffic conditions.