Simulating Dual-Pixel Images From Ray Tracing For Depth Estimation
作者: Fengchen He, Dayang Zhao, Hao Xu, Tingwei Quan, Shaoqun Zeng
分类: cs.CV, eess.IV
发布日期: 2025-03-14 (更新: 2026-01-22)
期刊: Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2025
💡 一句话要点
提出基于光线追踪的双像素图像模拟方法Sdirt,提升深度估计模型在真实数据上的泛化性
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 双像素图像 深度估计 光线追踪 数据模拟 域泛化
📋 核心要点
- 双像素深度估计依赖大量真实数据,但定制相机数据稀缺,现有模拟方法忽略真实光学传播规律,导致模型泛化性差。
- 论文提出Sdirt方案,利用光线追踪技术模拟更真实的双像素图像,缩小模拟数据与真实数据之间的域差距。
- 实验结果表明,使用Sdirt模拟数据训练的深度估计模型,在真实双像素数据上表现出更好的泛化能力。
📝 摘要(中文)
许多研究利用双像素(DP)传感器的相位特性进行深度估计和去模糊等应用。然而,由于DP图像特征完全由相机硬件决定,DP深度配对数据集非常稀缺,尤其是在定制相机上进行深度估计时。为了解决这个问题,一些研究使用理想的光学系统模型来模拟DP图像。但是,这些模拟通常违反真实的光学传播规律,导致对真实DP数据的泛化能力较差。为了解决这个问题,我们研究了模拟和真实DP数据之间的域差距,并提出了使用基于光线追踪的DP图像模拟(Sdirt)方案的解决方案。Sdirt通过光线追踪生成真实的DP图像,并将其集成到深度估计训练流程中。实验结果表明,使用Sdirt模拟图像训练的模型对真实DP数据的泛化能力更好。代码和收集的数据集将在github.com/LinYark/Sdirt上提供。
🔬 方法详解
问题定义:论文旨在解决双像素深度估计中,由于真实双像素图像数据稀缺,以及现有模拟方法不够真实导致模型泛化能力差的问题。现有方法通常基于理想光学模型进行模拟,忽略了真实光学传播中的复杂现象,例如衍射、像差等,导致模拟数据与真实数据存在较大的域差距。
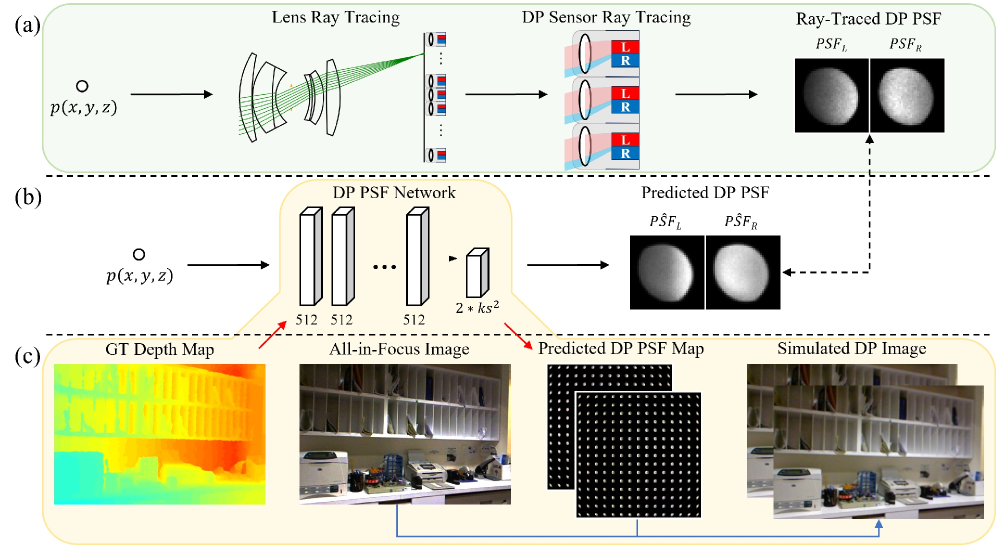
核心思路:论文的核心思路是利用光线追踪技术,模拟真实的光学传播过程,从而生成更逼真的双像素图像。通过更真实的模拟数据,缩小模拟数据与真实数据之间的域差距,提高深度估计模型在真实数据上的泛化能力。
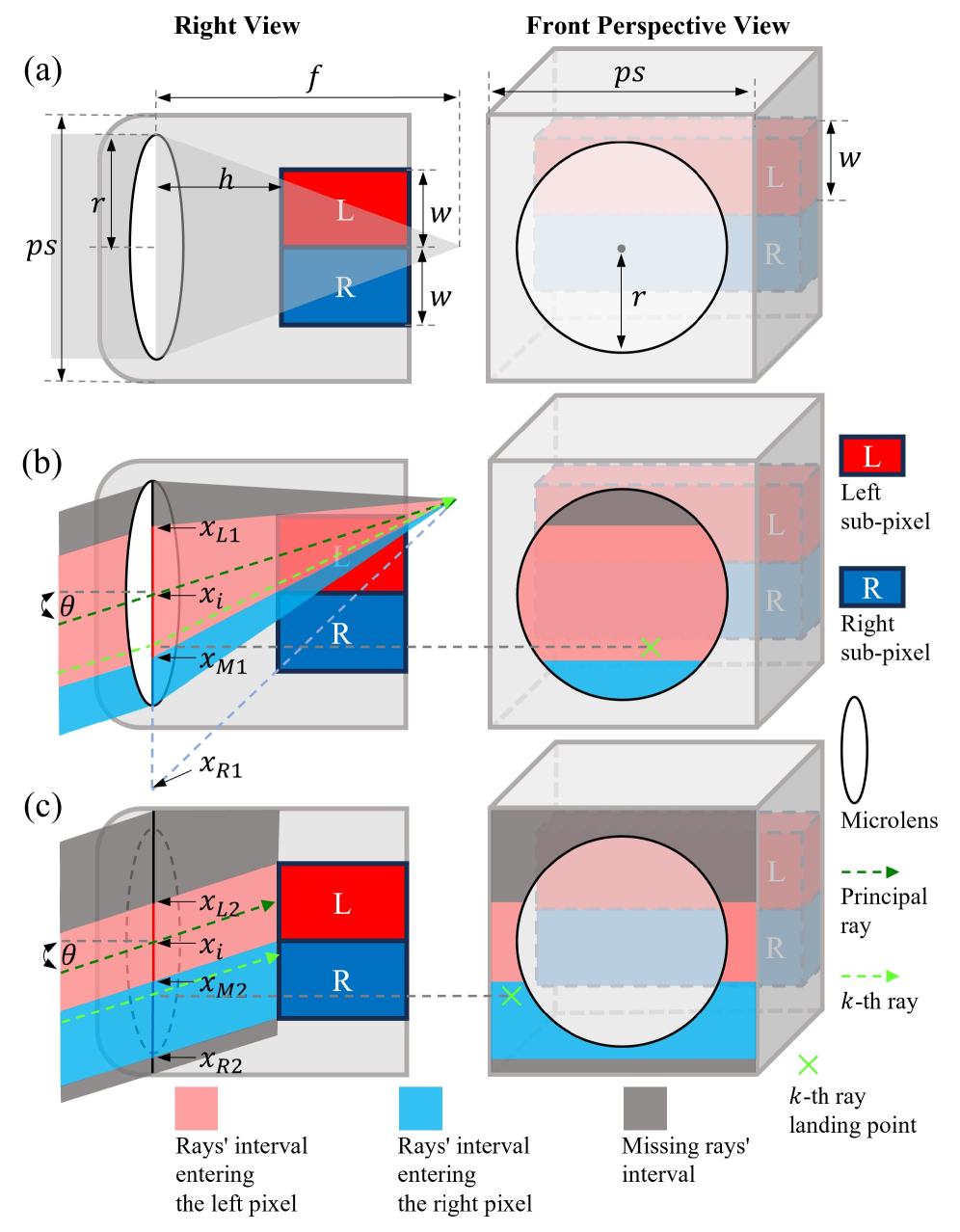
技术框架:Sdirt方案主要包含以下几个阶段:1)场景建模:使用三维建模软件构建场景;2)光线追踪:使用光线追踪引擎模拟光线在场景中的传播过程,包括反射、折射、衍射等;3)双像素图像生成:根据光线追踪的结果,模拟双像素传感器的成像过程,生成左右视角的图像;4)深度估计模型训练:使用生成的双像素图像训练深度估计模型。
关键创新:论文的关键创新在于使用光线追踪技术模拟双像素图像,相比于传统的基于理想光学模型的模拟方法,Sdirt能够更真实地模拟光学传播过程,从而生成更逼真的双像素图像。这种方法能够有效地缩小模拟数据与真实数据之间的域差距,提高深度估计模型在真实数据上的泛化能力。
关键设计:论文中没有详细说明关键参数设置、损失函数、网络结构等技术细节,但强调了光线追踪引擎的选择和参数配置,以及双像素传感器成像过程的模拟。未来的工作可以进一步研究如何优化光线追踪的效率,以及如何设计更有效的损失函数来提高深度估计的精度。
🖼️ 关键图片

📊 实验亮点
实验结果表明,使用Sdirt模拟图像训练的深度估计模型,在真实双像素数据上表现出更好的泛化能力。具体性能数据未知,但论文强调了Sdirt能够有效地缩小模拟数据与真实数据之间的域差距,从而提高模型在真实场景中的应用效果。未来的工作可以进一步量化Sdirt带来的性能提升,并与其他模拟方法进行比较。
🎯 应用场景
该研究成果可应用于各种需要双像素深度估计的场景,例如自动驾驶、机器人导航、三维重建等。通过使用Sdirt生成大量的训练数据,可以降低对真实双像素数据的依赖,从而降低开发成本和提高模型性能。此外,该方法还可以用于评估不同相机参数对深度估计精度的影响,为相机设计提供指导。
📄 摘要(原文)
Many studies utilize dual-pixel (DP) sensor phase characteristics for various applications, such as depth estimation and deblurring. However, since the DP image features are entirely determined by the camera hardware, DP-depth paired datasets are very scarce, especially when performing depth estimation on customized cameras. To overcome this, studies simulate DP images using ideal optical system models. However, these simulations often violate real optical propagation laws, leading to poor generalization to real DP data. To address this, we investigate the domain gap between simulated and real DP data, and propose solutions using the Simulating DP images from ray tracing (Sdirt) scheme. The Sdirt generates realistic DP images via ray tracing and integrates them into the depth estimation training pipeline. Experimental results show that models trained with Sdirt-simulated images generalize better to real DP data. The code and collected datasets will be available at github.com/LinYark/Sdirt