GoalFlow: Goal-Driven Flow Matching for Multimodal Trajectories Generation in End-to-End Autonomous Driving
作者: Zebin Xing, Xingyu Zhang, Yang Hu, Bo Jiang, Tong He, Qian Zhang, Xiaoxiao Long, Wei Yin
分类: cs.CV
发布日期: 2025-03-07 (更新: 2025-10-01)
🔗 代码/项目: GITHUB
💡 一句话要点
GoalFlow:面向端到端自动驾驶的多模态轨迹生成目标驱动流匹配方法
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 自动驾驶 轨迹生成 多模态 流匹配 目标驱动 端到端学习
📋 核心要点
- 现有自动驾驶轨迹生成方法存在轨迹发散问题,导致轨迹质量下降和选择复杂性增加。
- GoalFlow通过引入目标点约束轨迹生成过程,并利用流匹配生成高质量多模态轨迹。
- 实验表明,GoalFlow在Navsim数据集上取得了SOTA性能,PDMS达到90.3,且仅需单步去噪。
📝 摘要(中文)
本文提出了一种名为GoalFlow的端到端自动驾驶方法,用于生成高质量的多模态轨迹。在自动驾驶场景中,通常存在多个合适的轨迹。现有方法越来越关注建模多模态轨迹分布,但由于轨迹高度发散以及引导信息与场景信息不一致,导致轨迹选择复杂且轨迹质量下降。为了解决这些问题,我们引入了GoalFlow,一种有效约束生成过程以产生高质量多模态轨迹的新方法。为了解决基于扩散的方法中固有的轨迹发散问题,GoalFlow通过引入目标点来约束生成的轨迹。GoalFlow建立了一种新颖的评分机制,根据场景信息从候选点中选择最合适的目标点。此外,GoalFlow采用了一种高效的生成方法,即流匹配(Flow Matching),来生成多模态轨迹,并结合改进的评分机制来从候选轨迹中选择最优轨迹。实验结果在Navsim上验证,表明GoalFlow实现了最先进的性能,为自动驾驶提供了鲁棒的多模态轨迹。GoalFlow实现了90.3的PDMS,显著超过了其他方法。与其他基于扩散策略的方法相比,我们的方法仅需单步去噪即可获得出色的性能。代码已发布。
🔬 方法详解
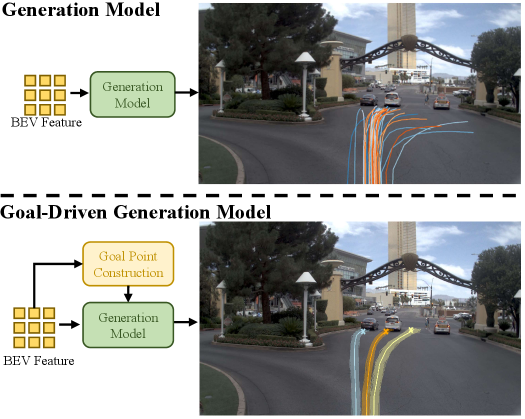
问题定义:现有基于扩散模型的自动驾驶轨迹生成方法存在轨迹发散的问题,导致生成轨迹的多样性过高,与场景信息不一致,从而降低了轨迹的质量,并增加了轨迹选择的复杂性。这些方法难以在保证轨迹质量的同时,有效地建模多模态轨迹分布。
核心思路:GoalFlow的核心思路是通过引入目标点来约束轨迹的生成过程,从而解决轨迹发散的问题。具体来说,GoalFlow首先根据场景信息选择合适的目标点,然后利用流匹配方法生成从当前状态到目标点的轨迹。通过目标点的约束,可以有效地减少轨迹的发散程度,提高轨迹的质量和与场景的一致性。
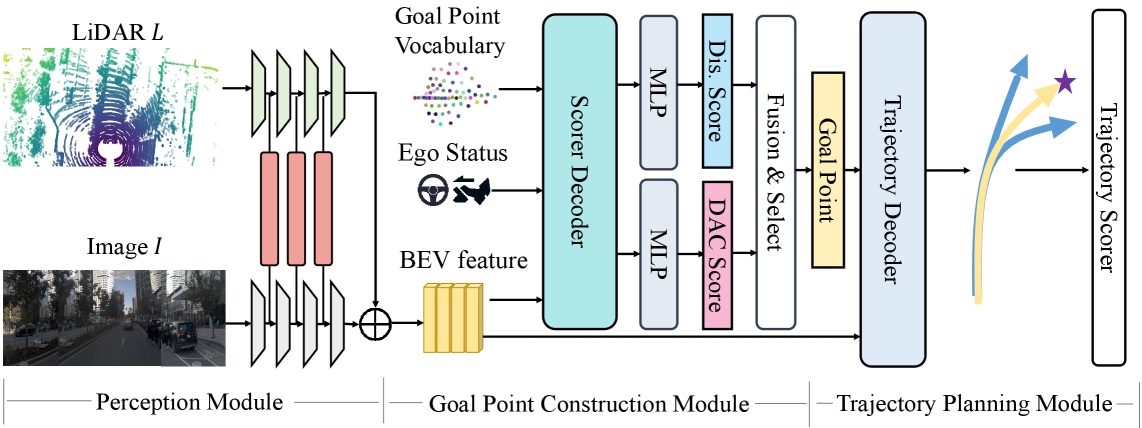
技术框架:GoalFlow的整体框架包括三个主要模块:目标点选择模块、轨迹生成模块和轨迹选择模块。首先,目标点选择模块根据场景信息从候选目标点中选择最优的目标点。然后,轨迹生成模块利用流匹配方法生成从当前状态到选定目标点的多条候选轨迹。最后,轨迹选择模块根据场景信息和轨迹的质量,从候选轨迹中选择最优的轨迹。
关键创新:GoalFlow的关键创新在于引入了目标点来约束轨迹生成过程,并提出了一种新颖的评分机制来选择最优的目标点和轨迹。与传统的扩散模型相比,GoalFlow通过目标点的约束,有效地减少了轨迹的发散程度,提高了轨迹的质量和与场景的一致性。此外,GoalFlow采用流匹配方法进行轨迹生成,相比于传统的扩散模型,具有更高的生成效率。
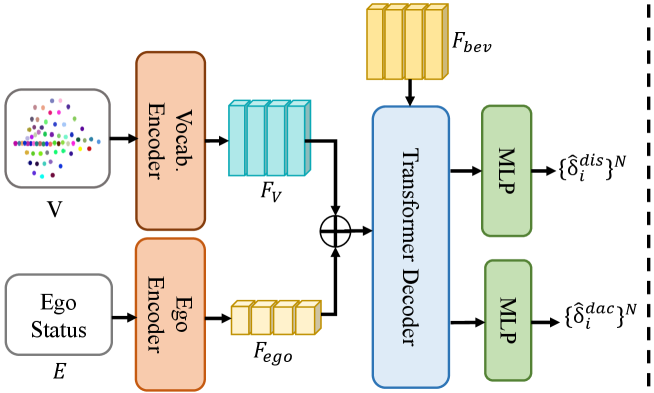
关键设计:GoalFlow的关键设计包括:1) 目标点选择模块的评分机制,该机制综合考虑了场景信息和目标点的可达性,从而选择最优的目标点;2) 轨迹生成模块采用的流匹配方法,该方法通过学习连续的向量场,实现高效的轨迹生成;3) 轨迹选择模块的评分机制,该机制综合考虑了场景信息和轨迹的质量,从而选择最优的轨迹。
🖼️ 关键图片
📊 实验亮点
GoalFlow在Navsim数据集上取得了显著的性能提升,PDMS达到了90.3,显著超过了其他方法。与其他基于扩散策略的方法相比,GoalFlow仅需单步去噪即可获得出色的性能,表明其具有更高的生成效率。实验结果充分验证了GoalFlow在自动驾驶轨迹生成方面的优越性。
🎯 应用场景
GoalFlow在自动驾驶领域具有广泛的应用前景,可以用于车辆的路径规划、行为决策和运动控制等方面。该方法能够生成高质量的多模态轨迹,提高自动驾驶系统的安全性和可靠性。此外,GoalFlow还可以应用于机器人导航、游戏AI等领域,为这些领域提供更智能、更高效的轨迹生成方法。
📄 摘要(原文)
We propose GoalFlow, an end-to-end autonomous driving method for generating high-quality multimodal trajectories. In autonomous driving scenarios, there is rarely a single suitable trajectory. Recent methods have increasingly focused on modeling multimodal trajectory distributions. However, they suffer from trajectory selection complexity and reduced trajectory quality due to high trajectory divergence and inconsistencies between guidance and scene information. To address these issues, we introduce GoalFlow, a novel method that effectively constrains the generative process to produce high-quality, multimodal trajectories. To resolve the trajectory divergence problem inherent in diffusion-based methods, GoalFlow constrains the generated trajectories by introducing a goal point. GoalFlow establishes a novel scoring mechanism that selects the most appropriate goal point from the candidate points based on scene information. Furthermore, GoalFlow employs an efficient generative method, Flow Matching, to generate multimodal trajectories, and incorporates a refined scoring mechanism to select the optimal trajectory from the candidates. Our experimental results, validated on the Navsim\cite{Dauner2024_navsim}, demonstrate that GoalFlow achieves state-of-the-art performance, delivering robust multimodal trajectories for autonomous driving. GoalFlow achieved PDMS of 90.3, significantly surpassing other methods. Compared with other diffusion-policy-based methods, our approach requires only a single denoising step to obtain excellent performance. The code is available at https://github.com/YvanYin/GoalFlow.