Category-level Meta-learned NeRF Priors for Efficient Object Mapping
作者: Saad Ejaz, Hriday Bavle, Laura Ribeiro, Holger Voos, Jose Luis Sanchez-Lopez
分类: cs.CV, cs.RO
发布日期: 2025-03-03 (更新: 2025-07-29)
🔗 代码/项目: GITHUB
💡 一句话要点
提出PRENOM,结合类别级先验与NeRF,高效实现物体三维重建与姿态估计
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 神经辐射场 三维重建 类别级先验 元学习 遗传算法 物体姿态估计 概率采样
📋 核心要点
- 现有方法如DeepSDF在类别级形状先验中应用广泛,但难以重建清晰几何结构且计算成本高昂,而NeRF虽然细节丰富,但与类别级先验的有效集成仍是挑战。
- PRENOM通过元学习获取物体类别信息,并利用多目标遗传算法为每个类别优化NeRF架构,同时采用概率射线采样加速收敛,提升重建质量。
- 实验表明,PRENOM在合成数据集上Chamfer距离降低21%,在真实数据集上重建指标平均提升13%,同时训练时间显著减少,验证了其高效性和准确性。
📝 摘要(中文)
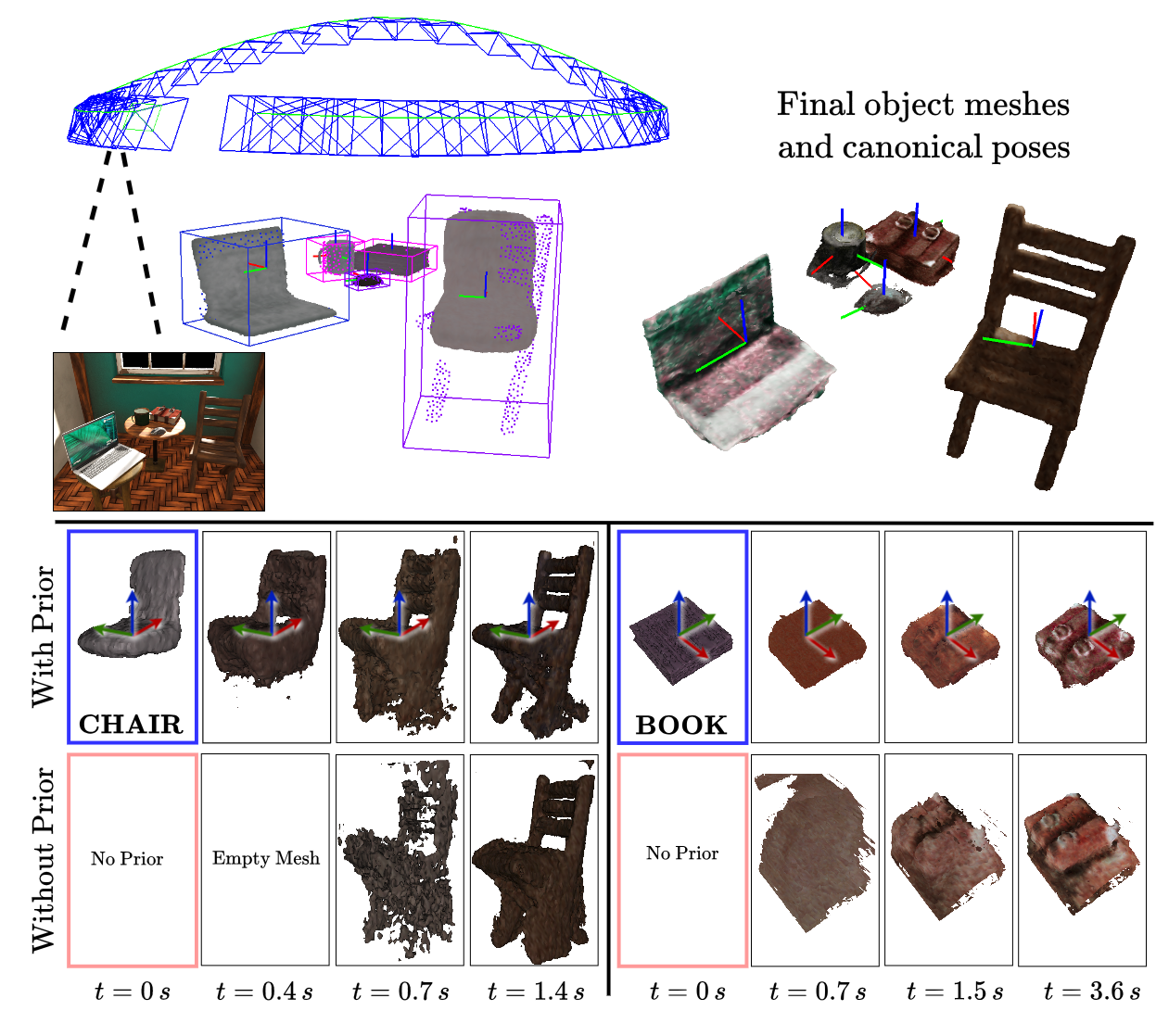
本文提出了一种基于先验的高效神经物体映射器PRENOM,用于三维物体映射。该方法结合了类别级先验与物体级NeRF,旨在提高重建效率并实现规范的物体姿态估计。PRENOM通过在开源形状数据集生成的合成重建任务上进行元学习,学习物体类别信息。为了适应物体类别变化,采用多目标遗传算法优化每个类别的NeRF架构,平衡重建质量和训练时间。此外,基于先验的概率射线采样将采样导向预期的物体区域,加速收敛并提高资源受限情况下的重建质量。实验结果表明,PRENOM能够在保持计算可行性的同时实现高质量的重建。在合成数据集上,与无先验的基于NeRF的方法相比,PRENOM的Chamfer距离降低了21%。在噪声较大的真实世界数据集上,与使用形状先验的其他方法相比,PRENOM在所有重建指标上的平均提升为13%,并且具有相当的姿态和尺寸估计精度,而训练时间减少了5倍。
🔬 方法详解
问题定义:论文旨在解决三维物体映射中,如何高效地利用类别级先验知识,提升物体重建质量和姿态估计精度的问题。现有方法,如DeepSDF,虽然可以作为类别级形状先验,但重建效果不够精细,计算成本高。而NeRF虽然能捕捉细节,但缺乏有效的类别级先验指导,难以在实时多物体映射框架中应用。
核心思路:论文的核心思路是将类别级先验知识融入到NeRF框架中,利用元学习方法从合成数据中学习不同类别的物体形状先验,并使用这些先验知识指导NeRF的训练过程。通过这种方式,可以提高NeRF的重建效率和精度,并实现规范的物体姿态估计。
技术框架:PRENOM的整体框架包含以下几个主要模块:1) 元学习模块:利用合成数据训练一个类别级的先验模型,学习不同类别物体的通用形状特征。2) NeRF优化模块:针对每个物体类别,使用多目标遗传算法优化NeRF的网络结构,平衡重建质量和训练时间。3) 概率射线采样模块:根据先验知识,对物体区域进行概率采样,加速NeRF的收敛过程。4) 重建与姿态估计模块:利用训练好的NeRF模型,对输入图像进行三维重建,并估计物体的规范姿态。
关键创新:PRENOM的关键创新在于将类别级先验知识与NeRF框架有效结合,并提出了基于多目标遗传算法的NeRF架构优化方法和基于先验的概率射线采样策略。与现有方法相比,PRENOM能够更高效地利用类别级先验知识,提高重建质量和姿态估计精度。
关键设计:在元学习阶段,使用合成数据集训练一个共享的先验模型。在NeRF优化阶段,使用多目标遗传算法搜索最优的网络结构,目标函数包括重建误差和训练时间。在概率射线采样阶段,根据先验模型预测的物体形状,对物体区域进行概率采样,提高采样效率。损失函数包括重建损失和正则化损失,用于约束NeRF的形状和外观。
🖼️ 关键图片


📊 实验亮点
实验结果表明,PRENOM在合成数据集上相比于无先验的NeRF方法,Chamfer距离降低了21%。在真实数据集上,与使用形状先验的方法相比,PRENOM在所有重建指标上的平均提升为13%,并且在姿态和尺寸估计方面具有相当的精度,同时训练时间减少了5倍。这些结果验证了PRENOM的有效性和高效性。
🎯 应用场景
PRENOM在机器人导航、增强现实、虚拟现实等领域具有广泛的应用前景。例如,机器人可以利用PRENOM快速重建周围环境中的物体,并估计其姿态,从而实现更智能的导航和交互。在AR/VR应用中,PRENOM可以用于快速生成逼真的三维物体模型,提升用户体验。此外,该方法还可以应用于三维物体识别、场景理解等领域。
📄 摘要(原文)
In 3D object mapping, category-level priors enable efficient object reconstruction and canonical pose estimation, requiring only a single prior per semantic category (e.g., chair, book, laptop, etc.). DeepSDF has been used predominantly as a category-level shape prior, but it struggles to reconstruct sharp geometry and is computationally expensive. In contrast, NeRFs capture fine details but have yet to be effectively integrated with category-level priors in a real-time multi-object mapping framework. To bridge this gap, we introduce PRENOM, a Prior-based Efficient Neural Object Mapper that integrates category-level priors with object-level NeRFs to enhance reconstruction efficiency and enable canonical object pose estimation. PRENOM gets to know objects on a first-name basis by meta-learning on synthetic reconstruction tasks generated from open-source shape datasets. To account for object category variations, it employs a multi-objective genetic algorithm to optimize the NeRF architecture for each category, balancing reconstruction quality and training time. Additionally, prior-based probabilistic ray sampling directs sampling toward expected object regions, accelerating convergence and improving reconstruction quality under constrained resources. Experimental results highlight the ability of PRENOM to achieve high-quality reconstructions while maintaining computational feasibility. Specifically, comparisons with prior-free NeRF-based approaches on a synthetic dataset show a 21\% lower Chamfer distance. Furthermore, evaluations against other approaches using shape priors on a noisy real-world dataset indicate a 13\% improvement averaged across all reconstruction metrics, and comparable pose and size estimation accuracy, while being trained for 5$\times$ less time. Code available at: https://github.com/snt-arg/PRENOM