FGS-SLAM: Fourier-based Gaussian Splatting for Real-time SLAM with Sparse and Dense Map Fusion
作者: Yansong Xu, Junlin Li, Wei Zhang, Siyu Chen, Shengyong Zhang, Yuquan Leng, Weijia Zhou
分类: cs.CV, cs.AI, cs.RO
发布日期: 2025-03-03 (更新: 2025-06-25)
💡 一句话要点
FGS-SLAM:基于傅里叶高斯溅射的实时SLAM,融合稀疏与稠密地图
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: SLAM 高斯溅射 傅里叶分析 实时建图 稀疏地图 稠密地图 GICP 三维重建
📋 核心要点
- 现有高斯溅射SLAM方法在高斯参数初始化时存在不确定性,导致收敛缓慢和冗余/不足的高斯表示。
- 该论文提出基于傅里叶频域分析的自适应稠密化方法,为高斯参数初始化提供先验,加速收敛。
- 通过构建独立的稀疏地图(用于跟踪)和稠密地图(用于高保真渲染),实现了高效的定位和高质量的地图构建。
📝 摘要(中文)
本文提出了一种基于傅里叶的高斯溅射(Gaussian Splatting)SLAM系统,旨在实现实时定位和高保真地图构建。针对高斯位置和初始化参数的不确定性,引入了一种基于傅里叶频域分析的自适应稠密化方法,为高斯先验提供快速收敛。此外,构建了独立且统一的稀疏和稠密地图,其中稀疏地图通过广义迭代最近点(GICP)支持高效跟踪,稠密地图创建高保真视觉表示。这是首个利用频域分析实现高质量高斯映射的实时SLAM系统。实验结果表明,在Replica和TUM RGB-D数据集上,平均帧率为36 FPS,在定位和建图方面均实现了具有竞争力的精度。
🔬 方法详解
问题定义:现有的基于高斯溅射的SLAM系统在高斯参数初始化时存在较大的不确定性,导致需要大量的迭代才能收敛,并且容易出现高斯表示冗余或不足的问题。这限制了SLAM系统的效率和地图质量。
核心思路:该论文的核心思路是利用傅里叶频域分析来指导高斯溅射的初始化和稠密化过程。通过分析场景的频率特征,可以更好地估计高斯参数的先验分布,从而加速收敛并减少冗余。同时,采用稀疏地图和稠密地图相结合的方式,兼顾了跟踪的效率和地图的质量。
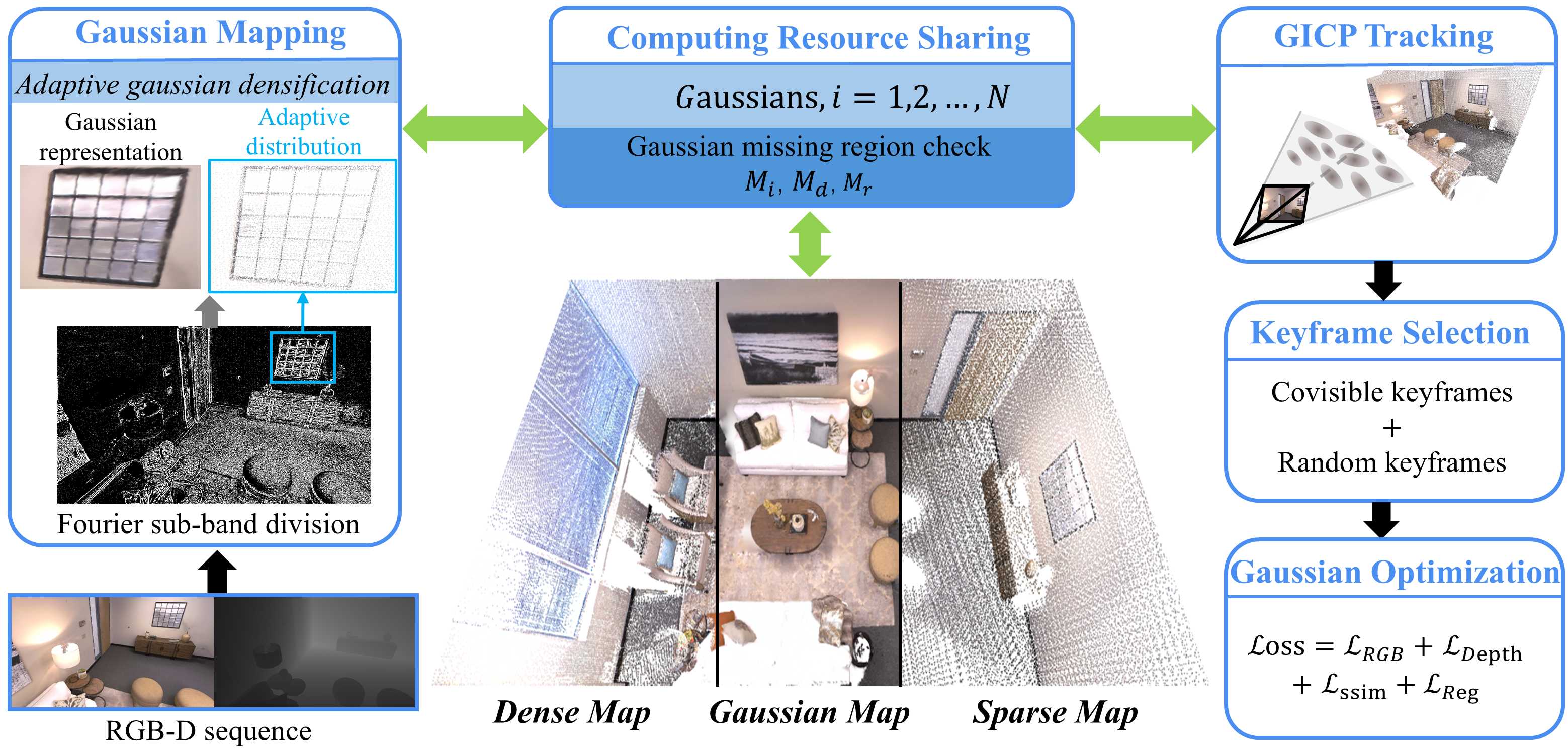
技术框架:FGS-SLAM系统主要包含以下几个模块:1) 图像输入与预处理;2) 基于傅里叶分析的高斯先验估计;3) 稀疏地图构建与GICP跟踪;4) 稠密地图构建与高斯溅射渲染;5) 地图融合与优化。系统首先对输入图像进行预处理,然后利用傅里叶分析估计场景的频率特征,并以此作为高斯参数的先验。接着,构建稀疏地图用于GICP跟踪,同时构建稠密地图用于高斯溅射渲染。最后,将稀疏地图和稠密地图进行融合和优化,得到最终的SLAM结果。
关键创新:该论文的关键创新在于将傅里叶频域分析引入到高斯溅射SLAM中。这是首次利用频域信息来指导高斯参数的初始化和稠密化,可以有效地解决现有方法中高斯参数不确定性的问题。此外,稀疏地图和稠密地图的融合也提高了系统的整体性能。
关键设计:在傅里叶分析方面,论文可能采用了快速傅里叶变换(FFT)等算法来提取图像的频率特征。在稀疏地图构建方面,可能采用了关键帧选择和特征点提取等技术。在稠密地图构建方面,可能采用了自适应的高斯稠密化策略,根据场景的复杂度动态调整高斯点的数量。损失函数可能包含GICP的配准误差、高斯溅射的渲染误差以及正则化项等。
🖼️ 关键图片


📊 实验亮点
实验结果表明,FGS-SLAM在Replica和TUM RGB-D数据集上实现了平均36 FPS的帧率,并在定位和建图精度方面达到了与现有方法相当甚至更优的水平。该系统在保证实时性的同时,实现了高质量的地图构建,证明了傅里叶频域分析在高斯溅射SLAM中的有效性。
🎯 应用场景
该研究成果可应用于机器人导航、增强现实、虚拟现实、三维重建等领域。例如,在机器人导航中,可以利用该系统构建高精度地图,帮助机器人在复杂环境中进行自主导航。在增强现实和虚拟现实中,可以利用该系统实现逼真的场景渲染,提升用户体验。此外,该系统还可以用于三维重建,生成高质量的三维模型。
📄 摘要(原文)
3D gaussian splatting has advanced simultaneous localization and mapping (SLAM) technology by enabling real-time positioning and the construction of high-fidelity maps. However, the uncertainty in gaussian position and initialization parameters introduces challenges, often requiring extensive iterative convergence and resulting in redundant or insufficient gaussian representations. To address this, we introduce a novel adaptive densification method based on Fourier frequency domain analysis to establish gaussian priors for rapid convergence. Additionally, we propose constructing independent and unified sparse and dense maps, where a sparse map supports efficient tracking via Generalized Iterative Closest Point (GICP) and a dense map creates high-fidelity visual representations. This is the first SLAM system leveraging frequency domain analysis to achieve high-quality gaussian mapping in real-time. Experimental results demonstrate an average frame rate of 36 FPS on Replica and TUM RGB-D datasets, achieving competitive accuracy in both localization and mapping.