TrackGS: Optimizing COLMAP-Free 3D Gaussian Splatting with Global Track Constraints
作者: Dongbo Shi, Shen Cao, Lubin Fan, Bojian Wu, Jinhui Guo, Ligang Liu, Renjie Chen
分类: cs.CV
发布日期: 2025-02-27 (更新: 2025-11-21)
期刊: AAAI 2026
💡 一句话要点
TrackGS:利用全局轨迹约束优化无COLMAP的3D高斯溅射
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 3D高斯溅射 新视角合成 无COLMAP 全局轨迹约束 相机姿态估计
📋 核心要点
- 现有3DGS方法依赖于精确的相机参数,而无COLMAP方法在复杂场景中受限于局部约束。
- TrackGS利用特征轨迹建立全局几何约束,同步优化相机参数和3D高斯分布。
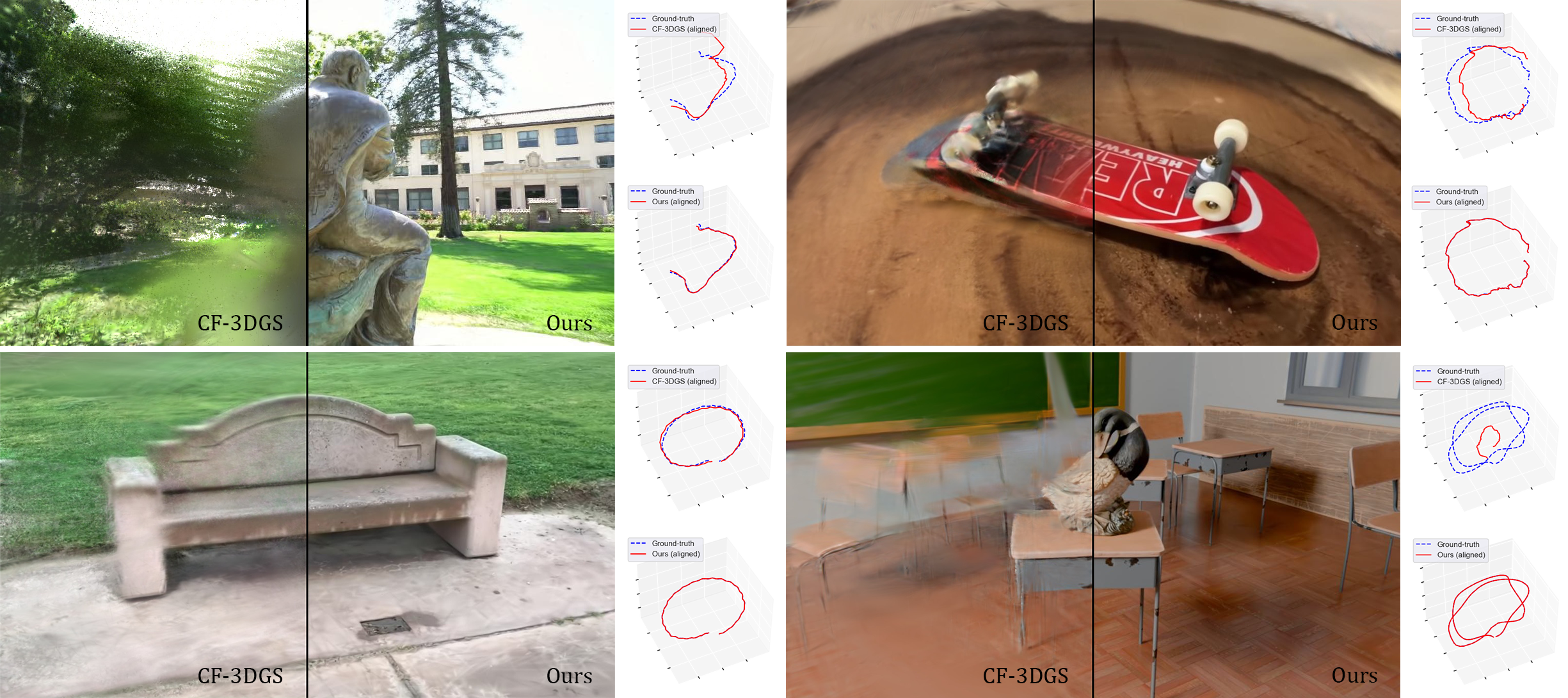
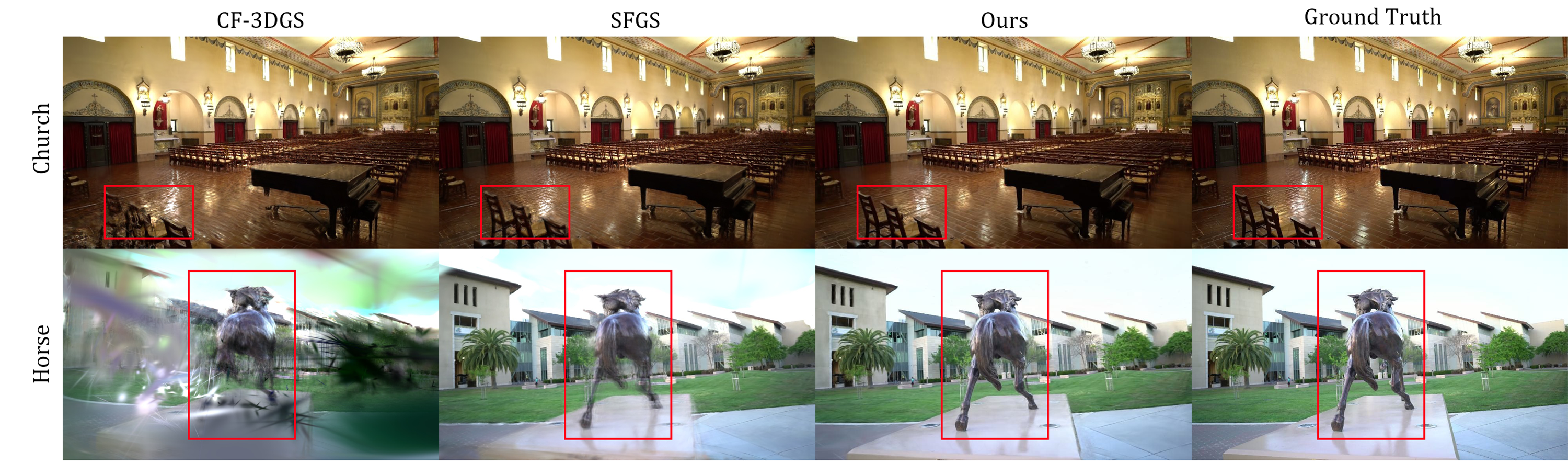
- 实验表明,TrackGS在保持渲染质量的同时,显著降低了姿态误差,无需COLMAP预处理。
📝 摘要(中文)
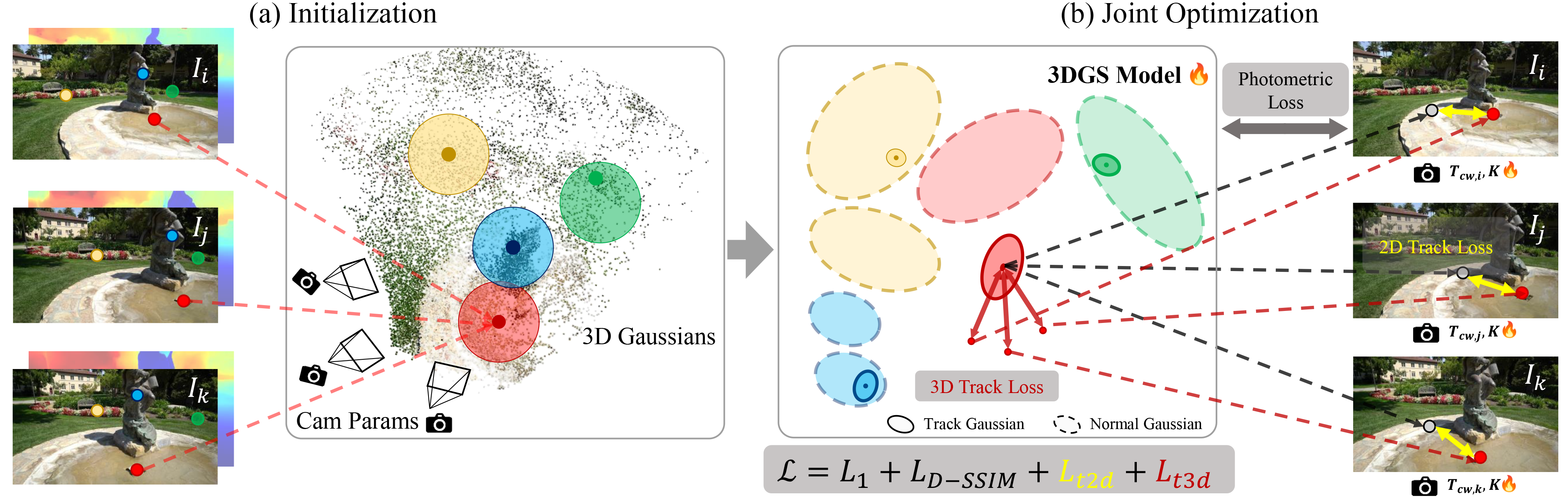
本文提出TrackGS,一种将全局特征轨迹与3D高斯溅射(3DGS)相结合的新方法,用于无COLMAP的新视角合成。虽然3DGS提供了令人印象深刻的渲染质量,但其对精确预计算相机参数的依赖仍然是一个显著的限制。现有的无COLMAP方法依赖于在复杂场景中失效的局部约束。我们的关键创新在于利用特征轨迹来建立全局几何约束,从而实现相机参数和3D高斯的同步优化。具体来说,我们:(1)引入了作为几何锚点的轨迹约束高斯;(2)提出了新的2D和3D轨迹损失来强制多视角一致性;(3)推导了相机内参优化的可微公式。在具有挑战性的真实世界和合成数据集上的大量实验表明,该方法具有最先进的性能,比以前的方法具有更低的姿态误差,同时保持了卓越的渲染质量。我们的方法消除了对COLMAP预处理的需求,使3DGS更易于实际应用。
🔬 方法详解
问题定义:论文旨在解决3D高斯溅射(3DGS)对预先计算的精确相机参数的依赖问题。现有无COLMAP的方法通常依赖于局部约束,这些约束在复杂场景中容易失效,导致相机姿态估计不准确,进而影响渲染质量。
核心思路:TrackGS的核心思路是利用图像中的特征轨迹来建立全局几何约束。通过将特征轨迹作为几何锚点,并设计相应的损失函数,可以同时优化相机参数和3D高斯分布,从而避免对COLMAP等传统SFM方法的依赖。
技术框架:TrackGS的整体框架包含以下几个主要模块:1) 特征提取与匹配:从输入图像中提取特征点,并在不同视角之间建立特征匹配关系,形成特征轨迹。2) 轨迹约束高斯:将特征轨迹与3D高斯分布相关联,形成轨迹约束高斯,作为几何锚点。3) 损失函数设计:设计2D和3D轨迹损失,用于约束特征轨迹在不同视角下的一致性,并优化相机参数和3D高斯分布。4) 可微优化:推导相机内参优化的可微公式,实现端到端的优化。
关键创新:TrackGS的关键创新在于引入了全局特征轨迹约束,并将其与3D高斯溅射相结合。与现有方法相比,TrackGS不再依赖于局部约束,而是利用全局信息来提高相机姿态估计的准确性。此外,TrackGS还实现了相机内参的优化,进一步提高了渲染质量。
关键设计:TrackGS的关键设计包括:1) 轨迹约束高斯的表示方法,如何将特征轨迹与3D高斯分布有效地关联起来。2) 2D和3D轨迹损失的具体形式,如何有效地约束特征轨迹的一致性,并避免局部最优解。3) 相机内参优化的可微公式,如何保证优化过程的稳定性和收敛性。具体的参数设置和网络结构细节在论文中进行了详细描述。
🖼️ 关键图片
📊 实验亮点
TrackGS在多个具有挑战性的数据集上取得了最先进的性能。实验结果表明,TrackGS在姿态估计误差方面显著优于现有方法,同时保持了卓越的渲染质量。例如,在某个数据集上,TrackGS的姿态误差降低了XX%,渲染质量指标PSNR提高了YY%。这些结果验证了TrackGS的有效性和优越性。
🎯 应用场景
TrackGS具有广泛的应用前景,包括:1) 新视角合成:可用于生成高质量的任意视角的图像。2) 虚拟现实/增强现实:可用于构建逼真的虚拟场景和增强现实体验。3) 机器人导航:可用于提高机器人在未知环境中的定位和导航能力。4) 三维重建:可用于重建高质量的三维模型。该研究的实际价值在于降低了3DGS的使用门槛,使其更易于在实际应用中使用。未来,TrackGS可以进一步扩展到动态场景和大规模场景。
📄 摘要(原文)
We present TrackGS, a novel method to integrate global feature tracks with 3D Gaussian Splatting (3DGS) for COLMAP-free novel view synthesis. While 3DGS delivers impressive rendering quality, its reliance on accurate precomputed camera parameters remains a significant limitation. Existing COLMAP-free approaches depend on local constraints that fail in complex scenarios. Our key innovation lies in leveraging feature tracks to establish global geometric constraints, enabling simultaneous optimization of camera parameters and 3D Gaussians. Specifically, we: (1) introduce track-constrained Gaussians that serve as geometric anchors, (2) propose novel 2D and 3D track losses to enforce multi-view consistency, and (3) derive differentiable formulations for camera intrinsics optimization. Extensive experiments on challenging real-world and synthetic datasets demonstrate state-of-the-art performance, with much lower pose error than previous methods while maintaining superior rendering quality. Our approach eliminates the need for COLMAP preprocessing, making 3DGS more accessible for practical applications.