3D Gaussian Splatting aided Localization for Large and Complex Indoor-Environments
作者: Vincent Ress, Jonas Meyer, Wei Zhang, David Skuddis, Uwe Soergel, Norbert Haala
分类: cs.CV, cs.RO
发布日期: 2025-02-19
DOI: 10.5194/isprs-archives-XLVIII-G-2025-1283-2025
💡 一句话要点
利用3D高斯溅射辅助定位,提升复杂室内环境视觉定位精度与可靠性
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 3D高斯溅射 视觉定位 室内环境 SLAM 图像渲染 场景坐标回归
📋 核心要点
- 现有视觉定位方法在复杂场景中面临挑战,精度和可靠性有待提升。
- 利用3DGS地图渲染图像来扩充参考数据,提升视觉定位算法的性能。
- 实验表明,该方法在大型工业环境中能有效提升几何方法和SCR方法的定位性能。
📝 摘要(中文)
本文提出了一种通过添加渲染图像来显著提高现有视觉定位方法准确性和可靠性的方法。该方法首先使用基于3D高斯溅射(3DGS)的视觉SLAM方法构建地图,然后利用该地图渲染出随机采样的姿态图像,以此丰富参考数据。实验结果表明,将这些渲染图像融入参考数据,能够有效提升基于几何的视觉定位方法和场景坐标回归(SCR)方法的性能。通过在大型工业环境中进行的综合评估,分析了引入额外渲染视图对定位性能的影响。
🔬 方法详解
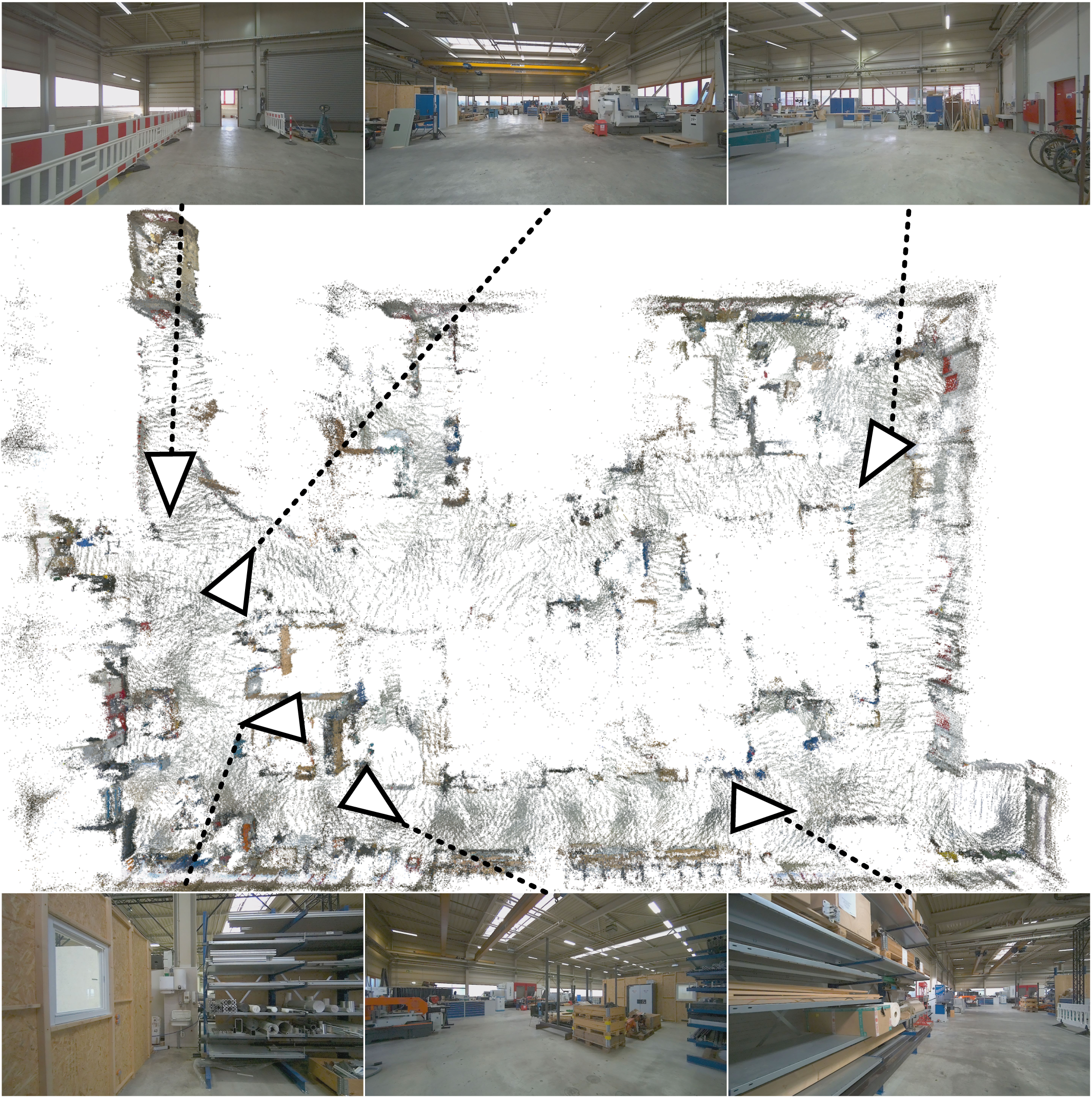
问题定义:现有的视觉定位方法在大型复杂室内环境中,由于光照变化、遮挡、缺乏纹理等问题,容易出现定位失败或精度下降的情况。尤其是在工业环境中,重复的结构和相似的场景会进一步加剧这一问题。因此,需要一种方法来提高视觉定位在这些场景中的鲁棒性和准确性。
核心思路:本文的核心思路是利用3D高斯溅射(3DGS)构建的场景地图,通过渲染生成额外的参考图像,从而增加参考数据的多样性和覆盖范围。这样,即使在原始参考图像不足或质量较差的情况下,定位算法也能找到更准确的匹配,提高定位的精度和可靠性。
技术框架:该方法主要包含以下几个阶段:1) 使用视觉SLAM方法构建基于3DGS的场景地图;2) 从3DGS地图中随机采样姿态;3) 从采样姿态渲染生成额外的参考图像;4) 将渲染图像添加到原始参考数据中;5) 使用增强后的参考数据进行视觉定位,例如基于几何的方法或场景坐标回归(SCR)方法。
关键创新:该方法最重要的创新点在于利用3DGS地图生成渲染图像来增强参考数据。与传统的图像增强方法不同,该方法生成的图像是从三维场景中渲染得到的,能够提供更丰富的视角和几何信息,从而更有效地提高定位算法的性能。此外,该方法可以灵活地应用于不同的视觉定位算法,具有较强的通用性。
关键设计:在3DGS地图构建方面,可以选择不同的视觉SLAM算法。在姿态采样方面,可以采用均匀采样或基于场景结构的采样策略。在渲染方面,需要考虑渲染图像的分辨率和渲染质量。在视觉定位方面,可以选择不同的特征提取和匹配算法,以及不同的场景坐标回归模型。具体的参数设置需要根据实际场景和应用需求进行调整。
🖼️ 关键图片

📊 实验亮点
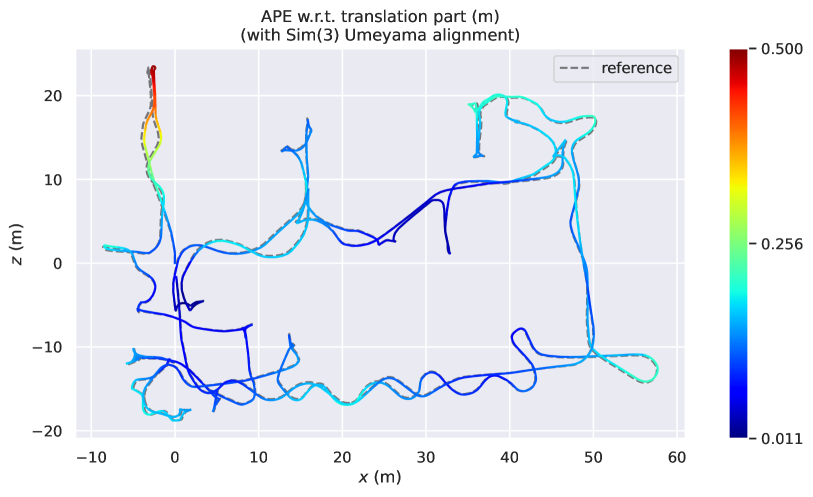
论文在大型工业环境中进行了实验,结果表明,通过引入3DGS渲染图像,能够显著提高视觉定位的精度和可靠性。具体而言,基于几何的视觉定位方法和场景坐标回归(SCR)方法的性能均得到了提升。虽然论文中没有给出具体的性能数据,但强调了该方法在复杂场景下的有效性。
🎯 应用场景
该研究成果可广泛应用于室内机器人导航、增强现实、工业自动化等领域。例如,在大型工厂或仓库中,可以利用该方法提高机器人的定位精度,实现更高效的物料搬运和设备维护。此外,该方法还可以用于构建更精确的室内地图,为用户提供更准确的导航服务。
📄 摘要(原文)
The field of visual localization has been researched for several decades and has meanwhile found many practical applications. Despite the strong progress in this field, there are still challenging situations in which established methods fail. We present an approach to significantly improve the accuracy and reliability of established visual localization methods by adding rendered images. In detail, we first use a modern visual SLAM approach that provides a 3D Gaussian Splatting (3DGS) based map to create reference data. We demonstrate that enriching reference data with images rendered from 3DGS at randomly sampled poses significantly improves the performance of both geometry-based visual localization and Scene Coordinate Regression (SCR) methods. Through comprehensive evaluation in a large industrial environment, we analyze the performance impact of incorporating these additional rendered views.