Efficient Point Clouds Upsampling via Flow Matching
作者: Zhi-Song Liu, Chenhang He, Lei Li
分类: cs.CV, eess.SP
发布日期: 2025-01-25
备注: 9 pages, 8 figures
💡 一句话要点
提出PUFM,通过Flow Matching高效实现点云上采样
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 点云上采样 Flow Matching 扩散模型 Earth Mover's Distance 三维重建
📋 核心要点
- 现有基于扩散模型的点云上采样方法效率低下,忽略了稀疏点云的几何信息,导致计算资源浪费。
- PUFM通过Flow Matching直接学习稀疏点云到密集点云的映射,避免了从噪声到点云的生成过程,提升了效率。
- 实验表明,PUFM在合成数据集上实现了更高的上采样质量,并且在ScanNet和KITTI等真实数据集上具有良好的泛化能力。
📝 摘要(中文)
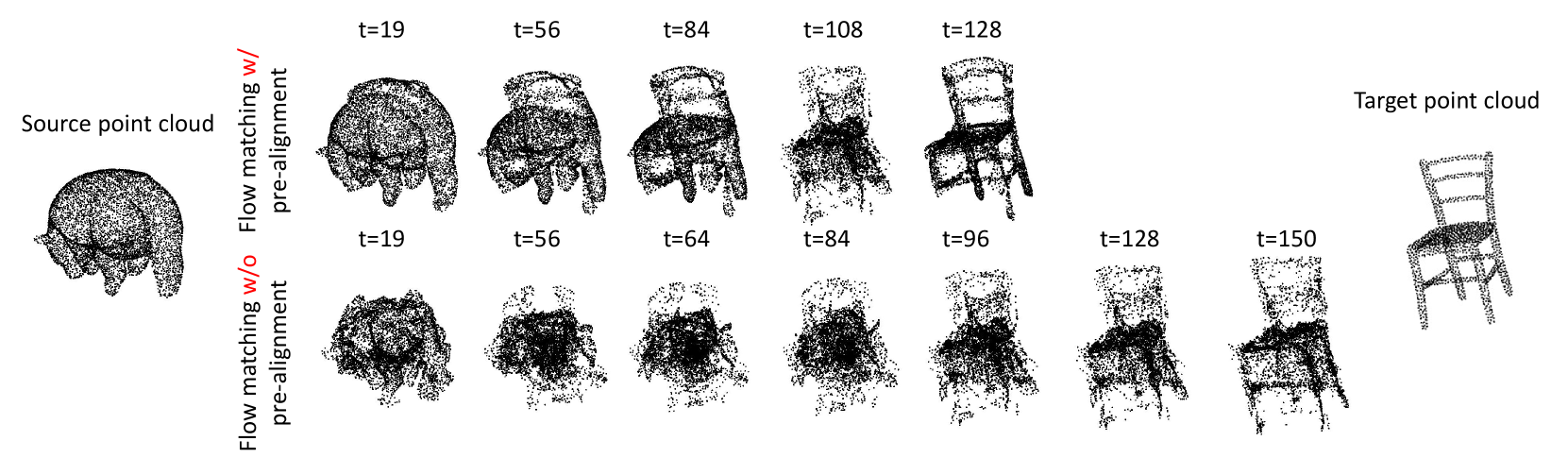
扩散模型是解决病态问题的一种强大框架,最近的进展将其应用扩展到点云上采样。然而,现有的扩散模型存在效率问题,因为它们将高斯噪声映射到真实点云,忽略了稀疏点云中固有的几何信息。为了解决这些低效问题,我们提出PUFM,一种Flow Matching方法,用于直接将稀疏点云映射到其高保真密集对应物。我们的方法首先对稀疏点云采用中点插值,解决稀疏和密集点云之间的密度不匹配问题。由于点云是无序表示,我们引入了一种基于Earth Mover's Distance (EMD) 优化的预对齐方法,以确保稀疏和密集点云之间的连贯插值,从而在Flow Matching中实现更稳定的学习路径。在合成数据集上的实验表明,我们的方法以更少的采样步骤提供了卓越的上采样质量。在ScanNet和KITTI上的进一步实验也表明,我们的方法在RGB-D点云和LiDAR点云上具有良好的泛化能力,使其更适用于实际应用。
🔬 方法详解
问题定义:现有的基于扩散模型的点云上采样方法,通常从高斯噪声开始,逐步去噪生成密集点云。这种方法没有充分利用稀疏点云本身包含的几何信息,导致采样步骤多,计算效率低。此外,直接学习稀疏到密集的映射关系,由于密度差异大,学习难度高。
核心思路:PUFM的核心思路是利用Flow Matching直接学习稀疏点云到密集点云的映射关系,避免了从噪声到点云的生成过程,从而提高效率。为了解决稀疏和密集点云之间的密度差异,论文首先采用中点插值来增加稀疏点云的密度,使其与密集点云的密度更加接近。同时,由于点云的无序性,论文引入了基于EMD的预对齐方法,确保稀疏和密集点云之间的对应关系。
技术框架:PUFM的整体流程如下:1) 对稀疏点云进行中点插值,增加其密度;2) 使用基于EMD的预对齐方法,对齐稀疏和密集点云;3) 使用Flow Matching学习稀疏点云到密集点云的映射关系。在推理阶段,给定一个稀疏点云,首先进行中点插值和预对齐,然后通过Flow Matching生成对应的密集点云。
关键创新:PUFM的关键创新在于:1) 使用Flow Matching直接学习稀疏点云到密集点云的映射关系,避免了从噪声到点云的生成过程;2) 引入中点插值和基于EMD的预对齐方法,解决了稀疏和密集点云之间的密度差异和无序性问题,使得Flow Matching的学习更加稳定和高效。
关键设计:论文使用Transformer网络作为Flow Matching的骨干网络,学习稀疏点云到密集点云的映射关系。损失函数采用Flow Matching常用的损失函数,例如L2损失。基于EMD的预对齐方法通过最小化稀疏和密集点云之间的EMD距离来实现。中点插值通过在相邻点之间插入新的点来增加点云的密度。
🖼️ 关键图片


📊 实验亮点
实验结果表明,PUFM在合成数据集上实现了比现有方法更高的上采样质量,并且在ScanNet和KITTI等真实数据集上具有良好的泛化能力。与基于扩散模型的方法相比,PUFM可以使用更少的采样步骤实现更高的性能,显著提高了效率。例如,在合成数据集上的实验表明,PUFM在相似的性能下,采样步骤可以减少到现有方法的1/4。
🎯 应用场景
PUFM具有广泛的应用前景,例如自动驾驶中的LiDAR点云补全、三维重建中的点云上采样、以及虚拟现实和增强现实中的高质量点云渲染。通过提高点云数据的质量和密度,PUFM可以提升相关应用系统的性能和用户体验,加速相关技术的发展和普及。
📄 摘要(原文)
Diffusion models are a powerful framework for tackling ill-posed problems, with recent advancements extending their use to point cloud upsampling. Despite their potential, existing diffusion models struggle with inefficiencies as they map Gaussian noise to real point clouds, overlooking the geometric information inherent in sparse point clouds. To address these inefficiencies, we propose PUFM, a flow matching approach to directly map sparse point clouds to their high-fidelity dense counterparts. Our method first employs midpoint interpolation to sparse point clouds, resolving the density mismatch between sparse and dense point clouds. Since point clouds are unordered representations, we introduce a pre-alignment method based on Earth Mover's Distance (EMD) optimization to ensure coherent interpolation between sparse and dense point clouds, which enables a more stable learning path in flow matching. Experiments on synthetic datasets demonstrate that our method delivers superior upsampling quality but with fewer sampling steps. Further experiments on ScanNet and KITTI also show that our approach generalizes well on RGB-D point clouds and LiDAR point clouds, making it more practical for real-world applications.