GauSTAR: Gaussian Surface Tracking and Reconstruction
作者: Chengwei Zheng, Lixin Xue, Juan Zarate, Jie Song
分类: cs.CV
发布日期: 2025-01-17 (更新: 2025-03-14)
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
GauSTAR:提出基于高斯表面的动态场景跟踪与重建方法,解决拓扑结构变化难题。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 动态场景重建 高斯溅射 表面跟踪 拓扑变化 场景流
📋 核心要点
- 现有方法难以处理动态表面跟踪中复杂的拓扑结构变化,如表面的出现、消失或分裂。
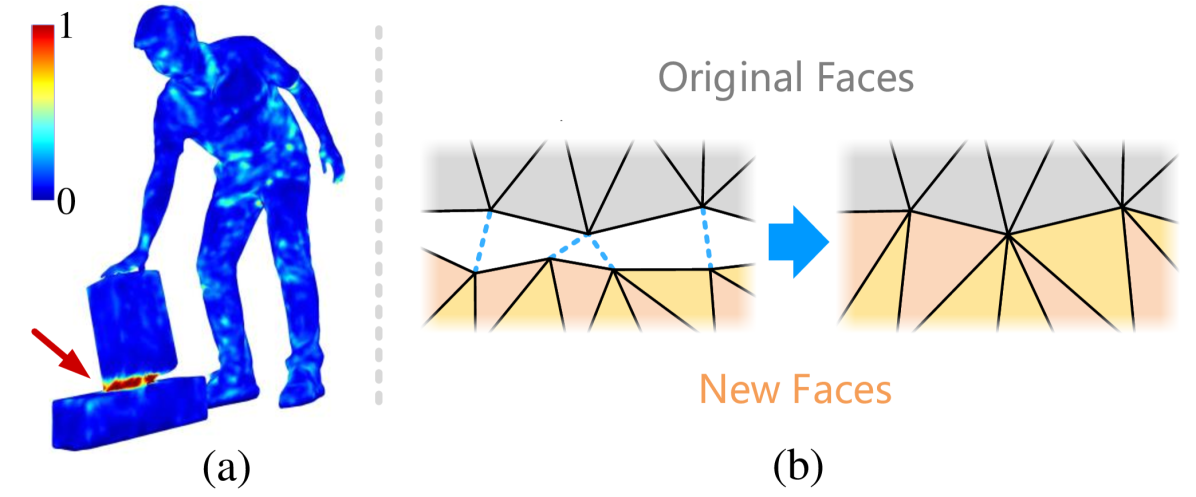
- GauSTAR的核心思想是将高斯函数与网格面绑定,并自适应地解绑高斯函数以处理拓扑结构变化。
- 实验结果表明,GauSTAR能够有效地跟踪和重建动态表面,并支持一系列应用。
📝 摘要(中文)
本文提出了一种名为GauSTAR的新方法,用于实现动态场景的逼真渲染、精确表面重建和可靠的3D跟踪,尤其针对拓扑结构变化的场景。GauSTAR将高斯函数与网格面绑定来表示动态物体。对于拓扑结构一致的表面,GauSTAR维护网格拓扑并使用高斯函数跟踪网格。对于拓扑结构变化的区域,GauSTAR自适应地将高斯函数从网格中解绑,从而实现精确的配准和新表面的生成。此外,本文还引入了一种基于表面的场景流方法,为帧间跟踪提供鲁棒的初始化。实验结果表明,该方法能够有效地跟踪和重建动态表面,并支持一系列应用。
🔬 方法详解
问题定义:现有的基于3D高斯溅射的动态场景跟踪与重建方法,在处理拓扑结构发生变化的动态表面时面临挑战。例如,当物体出现、消失或分裂时,如何准确地跟踪和重建这些表面的几何结构和外观是一个难题。这些方法通常难以有效地处理这些复杂的拓扑变化,导致跟踪失败或重建质量下降。
核心思路:GauSTAR的核心思路是将3D高斯函数与网格表面绑定,利用网格的拓扑信息来指导高斯函数的优化和跟踪。当拓扑结构发生变化时,GauSTAR能够自适应地解绑高斯函数,使其能够自由地适应新的表面几何结构。这种解绑机制允许GauSTAR在拓扑变化区域生成新的表面,从而实现对动态场景的准确重建和跟踪。
技术框架:GauSTAR的整体框架包括以下几个主要阶段:1) 初始化:使用多视角图像作为输入,初始化3D高斯函数和网格表面。2) 绑定:将高斯函数与网格表面绑定,建立高斯函数与表面几何结构之间的对应关系。3) 跟踪:利用绑定的高斯函数和网格表面,跟踪动态场景中的物体运动。4) 解绑与生成:当拓扑结构发生变化时,自适应地解绑高斯函数,并利用解绑的高斯函数生成新的表面。5) 优化:优化高斯函数和网格表面的参数,以实现逼真的渲染和精确的重建。此外,还引入了基于表面的场景流方法,为帧间跟踪提供鲁棒的初始化。
关键创新:GauSTAR的关键创新在于其自适应解绑机制,该机制允许高斯函数在拓扑结构变化区域自由地适应新的表面几何结构。与现有方法相比,GauSTAR能够更有效地处理复杂的拓扑变化,从而实现对动态场景的更准确重建和跟踪。此外,基于表面的场景流方法也为帧间跟踪提供了更鲁棒的初始化。
关键设计:GauSTAR的关键设计包括:1) 绑定策略:设计了一种有效的绑定策略,将高斯函数与网格表面绑定,并维护它们之间的对应关系。2) 解绑策略:设计了一种自适应的解绑策略,根据拓扑结构变化的情况,自动解绑高斯函数。3) 损失函数:设计了一种综合的损失函数,包括渲染损失、重建损失和正则化损失,以优化高斯函数和网格表面的参数。4) 场景流初始化:利用基于表面的场景流方法,为帧间跟踪提供鲁棒的初始化。
🖼️ 关键图片


📊 实验亮点
实验结果表明,GauSTAR在动态场景跟踪和重建方面取得了显著的成果。与现有方法相比,GauSTAR能够更准确地跟踪和重建动态表面,尤其是在拓扑结构发生变化的区域。项目主页提供了代码和更多实验结果,进一步验证了GauSTAR的有效性。
🎯 应用场景
GauSTAR具有广泛的应用前景,包括虚拟现实、增强现实、机器人导航、自动驾驶、电影特效等领域。该方法能够实现对动态场景的逼真渲染和精确重建,为用户提供更沉浸式的体验。此外,GauSTAR还可以用于机器人导航和自动驾驶等领域,帮助机器人更好地理解和感知周围环境。未来,GauSTAR有望成为动态场景建模和渲染的重要工具。
📄 摘要(原文)
3D Gaussian Splatting techniques have enabled efficient photo-realistic rendering of static scenes. Recent works have extended these approaches to support surface reconstruction and tracking. However, tracking dynamic surfaces with 3D Gaussians remains challenging due to complex topology changes, such as surfaces appearing, disappearing, or splitting. To address these challenges, we propose GauSTAR, a novel method that achieves photo-realistic rendering, accurate surface reconstruction, and reliable 3D tracking for general dynamic scenes with changing topology. Given multi-view captures as input, GauSTAR binds Gaussians to mesh faces to represent dynamic objects. For surfaces with consistent topology, GauSTAR maintains the mesh topology and tracks the meshes using Gaussians. For regions where topology changes, GauSTAR adaptively unbinds Gaussians from the mesh, enabling accurate registration and generation of new surfaces based on these optimized Gaussians. Additionally, we introduce a surface-based scene flow method that provides robust initialization for tracking between frames. Experiments demonstrate that our method effectively tracks and reconstructs dynamic surfaces, enabling a range of applications. Our project page with the code release is available at https://eth-ait.github.io/GauSTAR/.